空間自動著陸導航激光雷達關鍵技術研究
2020-10-20 06:04:07楊文兵陳文弟
中國新技術新產品 2020年14期
楊文兵 陳文弟
摘? 要:隨著科技的快速發展,我國越來越重視空間自動導航著陸雷達技術的研究。為了進一步提升對于太空探測的研究深度,必須要研制新型的自動著陸導航傳感系統,改進傳統的研究方式,以激光雷達為切入點,實現高水平的技術創新。該文主要針對空間自動著陸導航激光雷達的關鍵技術進行簡要分析,并提出合理化建議。
關鍵詞:空間自動著陸導航;激光雷達;關鍵技術
中圖分類號: TN958.98? ? ? ? ? 文獻標志碼:A
0 前言
隨著信息技術的不斷進步,人們對于太空探測的深度增加,新型的激光雷達核心技術也逐漸嶄露頭角,提高了對自由探測區域的選擇度,實現復雜地區的自主探索,創新對應的多功能傳感器,使著陸器可以準確進行導航和著陸,實現對障礙物的合理規避。
1 激光雷達技術內容
為了保證著陸器在著陸地能夠自由穿梭,必須要研制多功能的傳感器,提高傳感器的檢測能力,從而實現高精準的地形測繪以及導航規避。在測繪領域中,激光雷達技術得了行業內專家人士的認可 [1]。目前產生了車載、機載以及固定站點等多應用平臺的激光雷達測繪產品,使傳統設施設備的測繪能力能夠在地形測繪、數字城市建設以及地形測量等多個領域得到合理應用,發揮激光雷達技術的獨特優勢。在導航規避中,激光雷達技術作為傳感器領域的重要技術,其可以憑借機器設備的多樣化功能,為無人駕駛車提供完美的路徑規劃以及障礙物規避信息,為后續的航空航天信息著陸導航奠定堅實的基礎。
2 激光雷達技術應用分類
2.1 激光測繪雷達技術發展情況
在激光雷達技術的應用過程中,其延伸出來的圖像測繪技術已經比原有的技術更加受到社會各界的廣泛關注。測繪雷達技術在地形測量中可以獲得高分辨率的三維圖像數據,實現內部的激光測繪信息數據目標的細化,通過陣列探測找出隱藏目標,實現探測技術與地理信息系統數據的實時共享。車載激光測繪產品主要可以用于全視場掃描,發揮雙激光雷達技術的作用,實現區域的三維信息采集。固定站點的激光雷達測繪產品則用于小型區域內的三維成像模型構造,實現現代化的行業信息采集的便捷化和便利化[2]。
2.2 激光自主導航雷達技術
激光自主導航雷達技術可以通過環境感知進行自主導航,應用于無人車駕駛、機器人定位導航、輔助定位導航等領域,激光雷達技術如同系統的“眼睛”。導航測繪系統通常采用激光雷達陣列成像的方式,通過掃描一段區域,建立高精度的數據地圖來感知周圍環境。在這項技術不斷發展的過程中,還可以用其他的多功能的激光成像雷達技術,實現測高與測低信息之間的合理地形匹配、導航以及危險探測等功能。
2.3 激光三維成像
激光成像雷達的成像方式,主要分為單點掃描、多點掃描以及面陣成像。
單點掃描是利用單維的掃描機構和單元探測儀器,使數據采集在成像時就能夠獲取,同時將數據信息傳輸到對應的互聯網系統中,實現圖像的快速掃描和測繪,掃描機構根據不同場景的變化,及時采集數據信息并做好有針對性的傳輸工作。其特點是成像時間長、數據刷新效率低且圖像處理技術十分困難,必須要有大型的掃描視場。
面陣成像方式的結構就比較簡單,只需要利用模擬機構采集信息,不需要提高數據刷新效率就能實現體系化的光學口徑以及驗證,實現高靈敏度的激光圖像繪制。
實驗時雷達激光技術采用了陣列成像的方式,掃描角度為40°×360°,成像數率為10 Hz,作用距離為70 m,距離精度為2 cm,從而實現車載環境下的高精準三維環境感知,以及無人車在實驗條件下的模擬導航行進。
3 自主著陸導航激光雷達技術基本內容
3.1 激光雷達技術原理
著陸導航激光雷達,必須要具備安全著陸、自主導航、風險規避等功能,具有高標準的成像速率和成像分辨率。激光雷達可以應用激光單點測距的方式實現有效掃描,使激光圖像在測量過程中經過空間映射,實現高能量的脈沖激光處理。由于激光發射頻率和掃描速率二者之間的不兼容性,一個指標的要求提升必定會導致另一個指標的下降,因此必須要較好地解決該項成像體制中指標的非兼顧性問題。
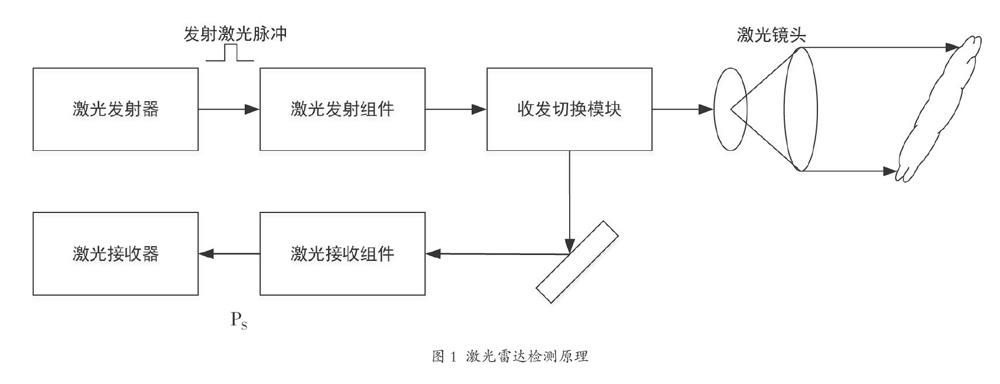
激光雷達包括發射機、光學系統、探測器信號處理以及數據無線處理等部分,發射機發射高能量的脈沖激光后,通過發射光學系統將其映照于探測區域,通過光接收組件進行收集,使探測器在高標準情況下,實現多通道的光電轉化以及信號的完善,進一步實現距離測量標準的精確化。圖像處理電路根據不同組件的信息反饋,完成目標距離的維度信息圖像分析,并將其輸出給著陸器控制系統,以該種信息作為導航處理的根本依據,確保測量信息以及存儲信息的中間轉換器角色的實時轉換。激光雷達原理如圖1所示。
激光雷達接收的信號功率=發射激光功率分布與目標后向散射系數的卷積,再考慮光學天線、大氣傳輸衰減等因素,障礙物z處后向散射信號的激光雷達方程的一般形式如公式(1)所示。
式中:Ar表示光學天線有效接收孔徑;R表示激光雷達作用距離;ηor接收光學系統效率;ηt發射光學系統效率;T2雙程大氣透過率;x和y構成激光有效面積;Jt表示激光發射功率的歸一化計算結果;βπ為激光束照射到目標后散射結果;Pt為激光發射功率;Ps表示接收激光的功率;ΔT表示發射和接收時間差; Es表示接收能量;h表示普朗克常量;v表示光子輻射頻率; 積分函數符號;表示散射截面積關于探測目標距離的微分。dx,dy,dz分別表示關于x,y,z方向的微分函數。通過以上公式可以計算出反射激光能能量和接收到的光子數。
3.2 工作模式
激光雷達可工作在單點測量、小視場成像以及大視場成效等多種模式下。單點測量的模式會對發射天線的距離進行調整,并反復比對,以此來獲取較小的激光脈沖效果,實現激光能量的具體化處理,提升激光雷達技術的應用效果。在中間段距離的設計中,激光雷達可以擴大激光的發射距離,將其轉換成小視場陣列成像,形成精準化的數字高程圖。通過相關的存儲的地圖匹配數據,進行定時導航的著陸點控制,在高標準下實現探測范圍的擴大,完善相應的三維圖像分辨率。
4 關鍵技術內容分析
4.1 高頻率激光發射技術
在激光雷達技術中,光纖激光器輸出窄、脈沖質量好且具有更小的體積和更低的能耗,能夠很好的進行散熱。但其受熱效應的限制,必須要增強光纖激光器的脈沖數,提高功率,以此來降低離子絕對值的相應制約因素的影響。半導體泵浦激光器采用LD/LDA作泵浦源,其優勢是數據處理效率高且質量好。由于泵浦燈具有較寬的輻射光譜和離子吸收帶,一旦二者之間匹配不達標,會使得整個激光器的吸收效率降低到3%,且出現大功率的熱效應下降的情況,導致光束質量與穩定性差異增大。另外一種LD/LDA的發射譜線則通過溫度調節的方式,改變激光雷達的發射波長,保證峰值發射波長與用離子吸收帶處于理想的配比狀態,提高工作效率。這種高頻率的激光發射器噪聲特性好、效率高、有質量保證,可以實現高頻率工作,低輸出功率,因此,已經受到了社會各界的廣泛關注和認可。
4.2 陣列探測技術
在激光雷達技術的應用過程中,最主要的技術是陣列探測技術。為了進一步促進該項技術的合理運行,要根據實際情況,解決發射激光的利用率問題和一致性問題,這2個問題是困擾該項技術發展的主要瓶頸。由于探測器在體系化管控存在一定的間隙,采用單個激光進行照明時,其所收集的激光覆蓋到整個陣列探測器表面,會導致能量的損失,導致在實際工作中需要對光能量進行二次采集。通過對發射光的圖樣進行設計,使發射圖樣與探測器匹配,可以確保激光發射和接收的能量具有一致性,提高光的利用效率,使通道內部的探測器能量的獲取途徑一致化。
5 結語
綜上所述,空間自動導航著陸雷達技術還有很大的研究空間。隨著對太空探測深度的進一步提升,必須要根據實際情況進行創新,提高激光成像雷達技術的應用效率,實現各項資源的合理互補,提高機器設備的導航精準效率,促進該項技術的可持續性進步與發展。
參考文獻
[1]卜弘毅.空間自動著陸導航激光雷達關鍵技術研究[D].上海:中國科學院上海技術物理研究所,2009.
[2]李磊,董光焰,彭鳳超.空間自主著陸導航激光雷達技術研究[J].電光系統,2015(1):34-37.
