航天器供配電系統(tǒng)數(shù)字伴飛技術(shù)應(yīng)用研究
2020-10-16 10:59:32劉治鋼夏寧杜青
航天器工程 2020年5期
劉治鋼 夏寧 杜青
(北京空間飛行器總體設(shè)計(jì)部,北京 100094)
航天器在軌的運(yùn)行狀態(tài)主要通過遙控指令和遙測參數(shù)與地面進(jìn)行交互。以嫦娥五號(hào)(Chang’e-5)、“國際空間站”(ISS)為代表的復(fù)雜航天器,具有在軌工作模式多、航天器組合狀態(tài)多、機(jī)構(gòu)運(yùn)動(dòng)復(fù)雜等特點(diǎn),加之受到測控弧段、測控資源的限制,難以通過遙測參數(shù)實(shí)時(shí)連續(xù)地了解整個(gè)航天器的在軌運(yùn)行狀態(tài)。針對(duì)上述問題,需要有一套地面模擬(或稱為數(shù)字孿生)系統(tǒng)能夠?qū)教炱鞯倪\(yùn)行狀態(tài)進(jìn)行高精度實(shí)時(shí)連續(xù)仿真或模擬。另外,在變軌、調(diào)姿、載荷開機(jī)等重要指令執(zhí)行前,也需要通過地面模擬系統(tǒng)對(duì)指令執(zhí)行情況和結(jié)果進(jìn)行模擬仿真和預(yù)示。
2003年,文獻(xiàn)[1]提出了數(shù)字孿生早期的一個(gè)定義,即物理產(chǎn)品的虛擬/數(shù)字等價(jià)物,也可理解為凡是用于模擬真實(shí)環(huán)境下系統(tǒng)狀態(tài)的樣機(jī)或模型,都可以被稱為“孿生體”[2]。2011年,文獻(xiàn)[3]重新豐富了數(shù)字孿生的概念,它包含3個(gè)部分:物理空間的實(shí)體產(chǎn)品;虛擬空間的虛擬產(chǎn)品;虛擬產(chǎn)品和實(shí)體產(chǎn)品之間的數(shù)據(jù)和信息通道。數(shù)字孿生應(yīng)具有“全生命周期”、“實(shí)時(shí)/準(zhǔn)實(shí)時(shí)”和“雙向”等特征。2011年,美國空軍研究實(shí)驗(yàn)室和NASA合作提出了構(gòu)建未來飛行器的數(shù)字孿生體,并定義數(shù)字孿生為一種面向飛行器或系統(tǒng)的高度集成的物理場、多尺度、多概率的仿真模型,能夠利用物理模型、傳感器數(shù)據(jù)和歷史數(shù)據(jù)等反映與該模型對(duì)應(yīng)的實(shí)體的功能、實(shí)時(shí)狀態(tài)及演變趨勢等。在故障預(yù)測與健康管理方面,NASA將物理系統(tǒng)與其等效的虛擬系統(tǒng)相結(jié)合,研究了基于數(shù)字孿生的復(fù)雜系統(tǒng)故障預(yù)測與消除方法[4]。
數(shù)字孿生概念在航天領(lǐng)域的引入最早可追溯到NASA的阿波羅工程,在該項(xiàng)目中,NASA制造了兩臺(tái)完全相同的飛行器,留在地面的一臺(tái)即稱為“孿生體”[5]。在任務(wù)準(zhǔn)備階段,“孿生體”可用于航天員訓(xùn)練;在飛行任務(wù)期間,“孿生體”被“鏡像”為在軌狀態(tài),用于任務(wù)方案的高精度仿真[6]。在空間站任務(wù)中,由于空間站電源系統(tǒng)規(guī)模太大,無法通過完整的系統(tǒng)實(shí)物聯(lián)試方法來驗(yàn)證電源系統(tǒng)的能力,因此,NASA的劉易斯研究中心能源和推進(jìn)實(shí)驗(yàn)室開發(fā)了航天器電能評(píng)估分析(Space System Power Analysis for Capability Evaluation,SPACE)軟件系統(tǒng),用于電源系統(tǒng)的設(shè)計(jì)與運(yùn)行評(píng)估[7]。國內(nèi)也開展了地面模擬器對(duì)航天器地面仿真、測試或在軌航天器飛控模擬相關(guān)實(shí)踐,通常是圍繞航天器的某種特性或行為開展。如文獻(xiàn)[8]針對(duì)航天器交會(huì)對(duì)接控制開展了半物理仿真研究;文獻(xiàn)[9]設(shè)計(jì)了一種用于航天器飛控演練的數(shù)管模擬器;文獻(xiàn)[10]提出一種推進(jìn)劑補(bǔ)加飛控模擬器;文獻(xiàn)[11]針對(duì)硬X射線調(diào)制望遠(yuǎn)鏡(HXMT)衛(wèi)星控制系統(tǒng)進(jìn)行的數(shù)字伴飛研究,初步嘗試解決該衛(wèi)星飛控策略、動(dòng)作執(zhí)行和狀態(tài)評(píng)估問題;文獻(xiàn)[12]針對(duì)模塊化航天器采用Simulink軟件建立了電源系統(tǒng)模型開展仿真研究。
本文以航天器供配電系統(tǒng)為研究對(duì)象,采用“數(shù)字孿生”技術(shù)思想開展航天器供配電數(shù)字伴飛技術(shù)研究,目的是建立航天器供配電系統(tǒng)數(shù)字化模型,將數(shù)字模型與實(shí)物航天器關(guān)聯(lián),通過遙控遙測數(shù)據(jù)、飛行程序等外部資源接口,實(shí)現(xiàn)地面仿真系統(tǒng)與在軌航天器的同步運(yùn)行,實(shí)現(xiàn)航天器供配電狀態(tài)實(shí)時(shí)監(jiān)測和狀態(tài)預(yù)示,同時(shí)通過仿真結(jié)果與遙測數(shù)據(jù)的對(duì)比和分析,對(duì)在軌航天器供配電系統(tǒng)任務(wù)進(jìn)行干預(yù)。
1 航天器供配電數(shù)字伴飛系統(tǒng)設(shè)計(jì)
1.1 航天器數(shù)字伴飛的概念與功能
航天器數(shù)字伴飛是借助航天器的“數(shù)字孿生體”模擬航天器實(shí)體在空間環(huán)境中的行為,通過虛實(shí)交互技術(shù),利用在虛擬環(huán)境中運(yùn)行的孿生體開展決策迭代優(yōu)化,解決航天器實(shí)體策略制定、動(dòng)作執(zhí)行和狀態(tài)評(píng)估等問題。若要對(duì)整個(gè)航天器的在軌行為進(jìn)行準(zhǔn)確模擬,就需建立多學(xué)科集成化的模擬環(huán)境。
通過航天器在軌狀態(tài)的數(shù)字伴飛,可實(shí)現(xiàn)以下功能。
1)航天器在軌運(yùn)行狀態(tài)實(shí)時(shí)評(píng)估
對(duì)實(shí)時(shí)遙測數(shù)據(jù)、實(shí)時(shí)仿真數(shù)據(jù)、歷史遙測數(shù)據(jù)、地面測試數(shù)據(jù)等信息進(jìn)行綜合處理,既可以實(shí)現(xiàn)對(duì)超范圍參數(shù)進(jìn)行實(shí)時(shí)提醒和報(bào)警,也可以對(duì)航天器在軌性能衰降情況進(jìn)行評(píng)估。如對(duì)蓄電池組電壓、蓄電池組放電深度、太陽電池陣輸出功率、母線電壓等重要參數(shù)遙測值與仿真值的實(shí)時(shí)比對(duì),包括數(shù)值比對(duì)、曲線比對(duì)等方式,對(duì)超范圍的參數(shù)進(jìn)行提醒和報(bào)警。
2)輔助制定航天器在軌運(yùn)行策略
將航天器物理實(shí)體運(yùn)行的約束條件、動(dòng)作時(shí)序、參與設(shè)備等信息作用于航天器數(shù)字孿生體,根據(jù)仿真結(jié)果預(yù)示執(zhí)行策略后的運(yùn)行狀態(tài),從而可以制定并優(yōu)化航天器在軌運(yùn)行策略。這樣,可以實(shí)現(xiàn)數(shù)字孿生體與物理實(shí)體的雙向作用,為航天器物理實(shí)體在軌運(yùn)行策略制定提供有效的信息支持。
3)故障狀態(tài)模擬與故障預(yù)案快速推演
通過修改數(shù)字孿生體的參數(shù)或運(yùn)行時(shí)序,數(shù)字伴飛系統(tǒng)可用于模擬故障模式下故障的演進(jìn)情況,同時(shí)對(duì)制定的故障預(yù)案進(jìn)行快速仿真模擬驗(yàn)證,輔助分析故障預(yù)案的可行性和有效性。如調(diào)整太陽電池陣對(duì)日定向角度、限定充電電流等進(jìn)行仿真,快速推演其對(duì)整星能量平衡的影響。
1.2 航天器數(shù)字伴飛的基礎(chǔ)
要實(shí)現(xiàn)航天器在軌飛行狀態(tài)的精確模擬和數(shù)字伴飛,可信的數(shù)字化模型和基于飛行事件/程序驅(qū)動(dòng)的仿真策略二者缺一不可。
1)可信的數(shù)字化模型
可信的數(shù)字化模型是開展數(shù)字伴飛的前提。通常,構(gòu)建航天器系統(tǒng)、設(shè)備或部組件模型的方法包括:數(shù)學(xué)建模、物理機(jī)理建模和試驗(yàn)數(shù)據(jù)建模等方式,在實(shí)際應(yīng)用中根據(jù)仿真顆粒度和對(duì)物理實(shí)體描述方式進(jìn)行選擇。對(duì)于部分無法或難以實(shí)現(xiàn)正向建模的參數(shù),如自主控溫策略引起的加熱功率變化等,可以通過控溫狀態(tài)進(jìn)行逆向建模。為保證模型的完備性,還需要明確模型的置信度和置信區(qū)間。完成建模后需要通過電性能測試、熱試驗(yàn)等地面測試或試驗(yàn)中對(duì)模型進(jìn)行修正,確保數(shù)字化模型輸出與實(shí)際輸出一致。另外,由于航天器在軌運(yùn)行狀態(tài)和地面測試狀態(tài)存在差異,還需要結(jié)合同類型衛(wèi)星歷史在軌數(shù)據(jù)或自身飛行的歷史數(shù)據(jù)對(duì)模型進(jìn)一步進(jìn)行修正。
2)飛行事件/程序驅(qū)動(dòng)的仿真策略
數(shù)字孿生體與航天器實(shí)體運(yùn)行保持時(shí)鐘同步是開展數(shù)字伴飛的重要保證。因此,系統(tǒng)必須采用高效的求解算法,以確保在飛行事件或飛行程序驅(qū)動(dòng)下實(shí)時(shí)狀態(tài)同步更新。在軌不可見弧段,孿生體通過預(yù)置飛行程序的方式實(shí)現(xiàn)與航天器實(shí)體同步運(yùn)行;在進(jìn)入可見弧段后,能夠快速對(duì)仿真狀態(tài)和遙測狀態(tài)進(jìn)行評(píng)估,并能夠?qū)Ψ抡鏍顟B(tài)/參數(shù)進(jìn)行修正,確保孿生體的狀態(tài)與航天器實(shí)體狀態(tài)同步。
1.3 航天器供配電數(shù)字伴飛系統(tǒng)設(shè)計(jì)
航天器供配電數(shù)字伴飛系統(tǒng)組成及功能邏輯如圖1所示。以航天器供配電系統(tǒng)級(jí)仿真模型為核心,依據(jù)地面試驗(yàn)數(shù)據(jù)對(duì)模型進(jìn)行校核;由飛行程序事件驅(qū)動(dòng)供配電系統(tǒng)模型建立數(shù)字伴飛狀態(tài),利用準(zhǔn)確的數(shù)學(xué)模型以及高精度的求解器,對(duì)全任務(wù)周期內(nèi)的供配電系統(tǒng)工作狀態(tài)進(jìn)行伴飛仿真分析;建立星上遙測數(shù)據(jù)輸入通道,達(dá)到地面數(shù)字模型與實(shí)際航天器同步運(yùn)行效果,對(duì)遙測數(shù)據(jù)和數(shù)字伴飛系統(tǒng)實(shí)時(shí)仿真結(jié)果進(jìn)行比對(duì),實(shí)現(xiàn)在線數(shù)據(jù)判讀;同時(shí)結(jié)合飛行任務(wù)需要,通過曲線、圖表、STK動(dòng)畫等形式對(duì)數(shù)字伴飛的結(jié)果進(jìn)行展示。數(shù)字伴飛系統(tǒng)還可以通過輸入下一階段的飛行程序,對(duì)航天器供配電系統(tǒng)的未來狀態(tài)進(jìn)行仿真預(yù)示;另外,還可以對(duì)預(yù)置故障模式(如一路太陽電池陣分陣開路、一節(jié)蓄電池單體失效等)下進(jìn)行仿真,輔助進(jìn)行故障分析、排查和故障預(yù)案制定等。
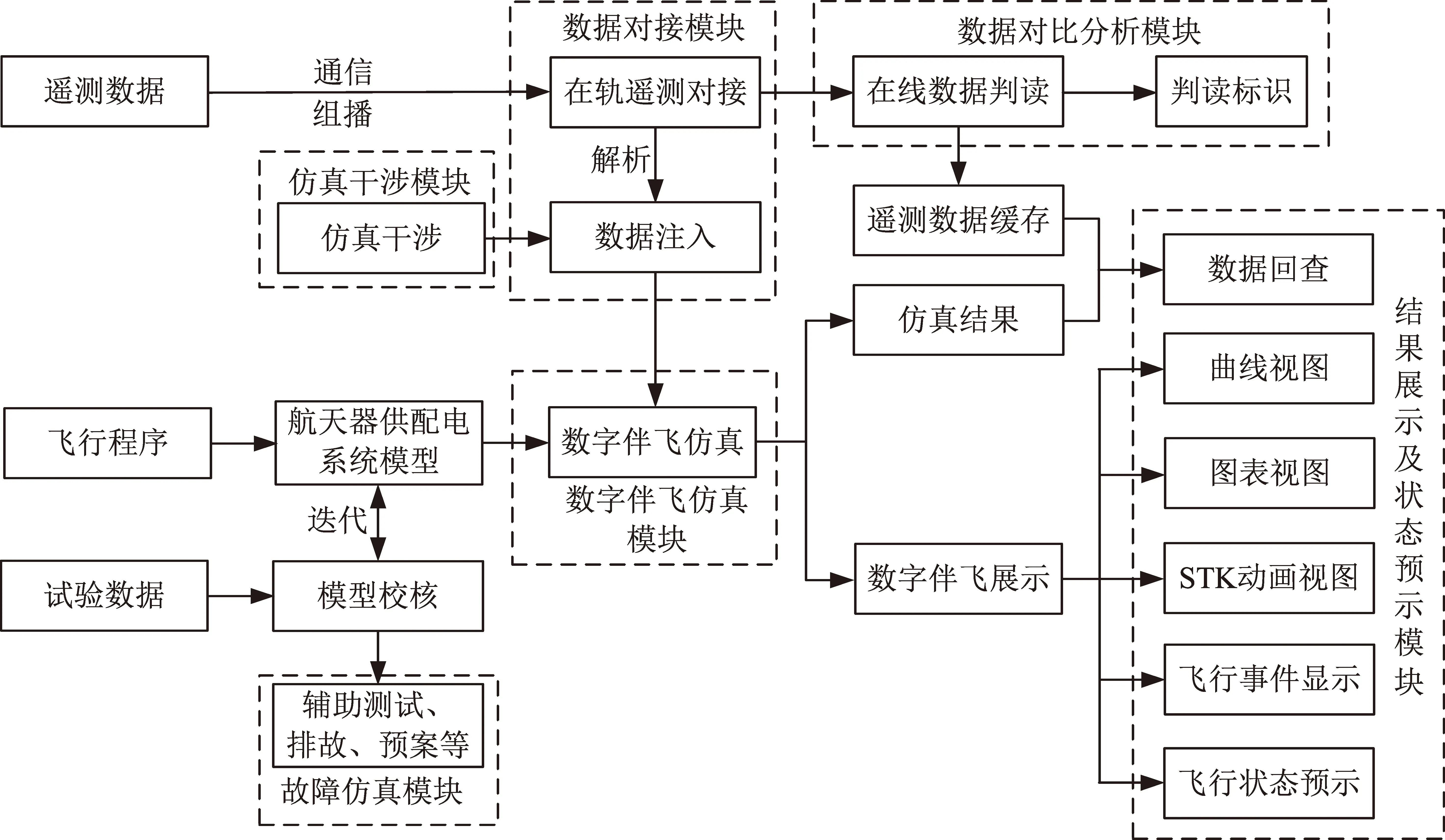
圖1 航天器數(shù)字伴飛系統(tǒng)組成與功能邏輯Fig.1 Composition and function logic diagram of spacecraft digital companion system
2 航天器數(shù)字伴飛關(guān)鍵技術(shù)
2.1 數(shù)據(jù)驅(qū)動(dòng)的模型動(dòng)態(tài)修正方法
現(xiàn)有模型驗(yàn)證一般都是依賴調(diào)節(jié)參數(shù),得到仿真模型的輸出響應(yīng)與真實(shí)物理系統(tǒng)的試驗(yàn)數(shù)據(jù)對(duì)比,通過最小二乘或優(yōu)化方法獲得模型的最佳參數(shù)。然而,如果一個(gè)模型結(jié)構(gòu)存在缺陷,那么通過調(diào)整模型參數(shù)無法使得其輸出響應(yīng)與真實(shí)響應(yīng)趨向一致。例如,供配電系統(tǒng)中鋰離子蓄電池組,通過擬合常溫充放電曲線得到蓄電池組模型,但如果實(shí)際工作溫度、充放電電流大范圍變化時(shí)固定的充放電曲線就會(huì)出現(xiàn)較大的誤差,需要通過不同溫度、不同倍率充放電的曲線族的方式進(jìn)行建模,通過調(diào)整模型結(jié)構(gòu)來獲得較好的仿真結(jié)果。針對(duì)常規(guī)依賴調(diào)節(jié)參數(shù)開展模型驗(yàn)證方法的不足,采用數(shù)據(jù)驅(qū)動(dòng)的模型動(dòng)態(tài)修正方法,通過動(dòng)態(tài)響應(yīng)曲線逼真度度量方法面向模型結(jié)構(gòu)(粗調(diào))和參數(shù)(細(xì)調(diào))的同步驗(yàn)證,在對(duì)地面測試海量數(shù)據(jù)分析的基礎(chǔ)上,使之與在軌飛行真實(shí)系統(tǒng)輸出趨于一致,提高模型置信度。實(shí)時(shí)數(shù)據(jù)驅(qū)動(dòng)的供配電系統(tǒng)模型動(dòng)態(tài)修正技術(shù)邏輯如圖2所示。
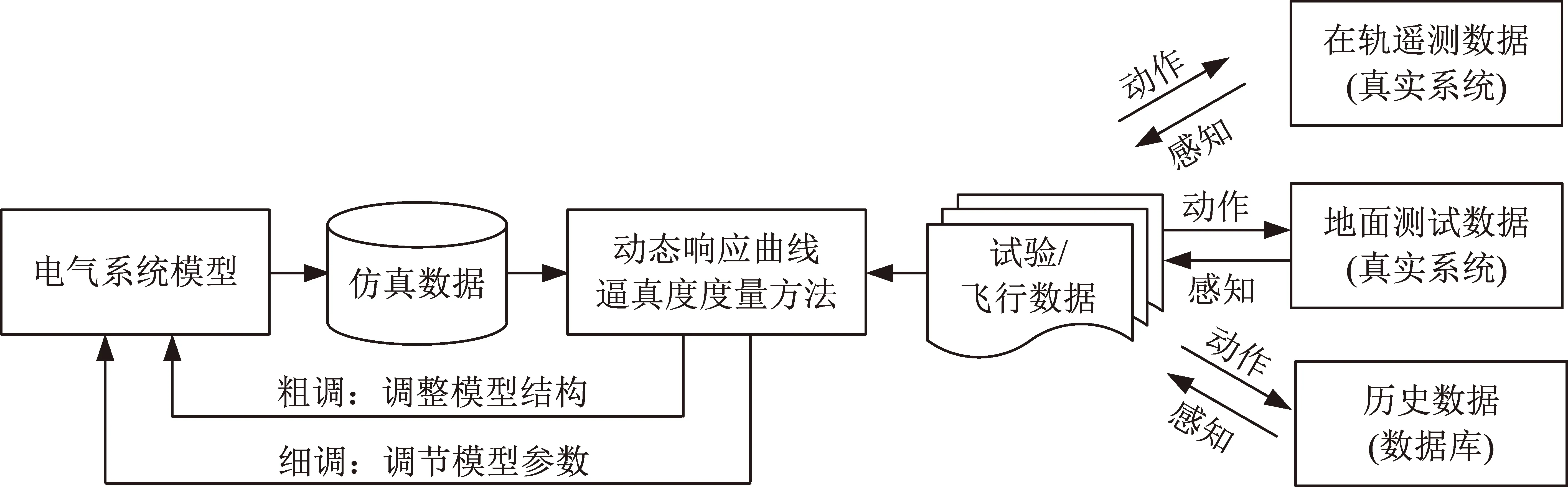
圖2 實(shí)時(shí)數(shù)據(jù)驅(qū)動(dòng)的供配電系統(tǒng)模型動(dòng)態(tài)修正技術(shù)Fig.2 Dynamic correction technology of real-time data-driven electrical system model
(1)粗調(diào)階段:在實(shí)際模型結(jié)構(gòu)搭建過程中,模型結(jié)構(gòu)均是由各功能或結(jié)構(gòu)單元組成,對(duì)模型結(jié)構(gòu)進(jìn)行調(diào)整可以轉(zhuǎn)化為不同類子模型之間的組合優(yōu)化問題。組合優(yōu)化的目標(biāo)是尋找最優(yōu)的子模型組合方案,使研究對(duì)象的模型整體的仿真結(jié)果與實(shí)際物理系統(tǒng)的真實(shí)輸出間的差值最小。在時(shí)間序列上對(duì)仿真結(jié)果和實(shí)際物理系統(tǒng)的真實(shí)輸出進(jìn)行離散,則最小化兩者之間的差值A(chǔ)即為優(yōu)化目標(biāo),如式(1)
(1)
式中:Si代表仿真結(jié)果,Ri代表實(shí)際物理系統(tǒng)的真實(shí)輸出結(jié)果,N代表時(shí)間序列的離散數(shù)。
(2)細(xì)調(diào)階段:當(dāng)粗調(diào)階段完成后,細(xì)調(diào)階段則針對(duì)模型參數(shù)進(jìn)行調(diào)整優(yōu)化。優(yōu)化的目標(biāo)仍然是仿真結(jié)果與實(shí)際物理系統(tǒng)輸出值的最小化差值。大型復(fù)雜系統(tǒng)模型通常會(huì)同時(shí)包含數(shù)字量和模擬量兩種類型的參數(shù)變量,針對(duì)其構(gòu)造的優(yōu)化問題是一個(gè)混合離散優(yōu)化問題,如式(2)。
(2)
式中:x是數(shù)字量變量,y是模擬量變量。
2.2 航天器系統(tǒng)飛行狀態(tài)仿真估計(jì)與預(yù)示技術(shù)
基于航天器飛行任務(wù)程序,采用在線與離線仿真相結(jié)合的技術(shù)手段,通過在軌遙測數(shù)據(jù)實(shí)時(shí)解析與供配電系統(tǒng)相關(guān)的飛行事件,實(shí)現(xiàn)航天器供配電系統(tǒng)“數(shù)字伴飛”:一方面進(jìn)行航天器供配電系統(tǒng)在軌飛行健康狀態(tài)評(píng)估;另一方面綜合在軌遙測、在線仿真、離線仿真、歷史數(shù)據(jù)的結(jié)果對(duì)比分析,對(duì)后續(xù)飛行狀態(tài)進(jìn)行預(yù)示。
通過在軌遙測數(shù)據(jù)實(shí)時(shí)解析飛行器姿態(tài)、軌道光照條件、飛行事件等,將外部條件的變化實(shí)時(shí)注入供配電系統(tǒng)模型,并基于遙測在線判讀知識(shí)庫,對(duì)在線遙測數(shù)據(jù)進(jìn)行閾值或者偏差分析判讀,識(shí)別當(dāng)前供配電系統(tǒng)的功能和性能狀態(tài)情況,評(píng)估航天器在軌飛行能源健康狀態(tài)。同時(shí)能夠通過提前置入下一階段的飛行程序,提前預(yù)算并評(píng)估系統(tǒng)的未來的運(yùn)行狀態(tài),輔助對(duì)航天器運(yùn)行管理策略的決策。根據(jù)對(duì)仿真結(jié)果數(shù)據(jù)的處理分析,及時(shí)調(diào)整優(yōu)化航天器的飛行程序,使得電氣系統(tǒng)處于更好的良性工作狀態(tài)。
在實(shí)時(shí)遙測數(shù)據(jù)驅(qū)動(dòng)的電氣系統(tǒng)模型仿真求解過程中,獲取求解器特定時(shí)刻求解狀態(tài)并另行開辟計(jì)算分支,以最近時(shí)段的空間姿態(tài)、飛行狀態(tài)等在軌遙測數(shù)據(jù)通過濾波算法(限幅濾波法、消抖濾波法、中位值濾波法等)濾波后作為求解計(jì)算初值,然后導(dǎo)入下一階段的飛行任務(wù)程序,結(jié)合在軌遙測值、當(dāng)前仿真值、仿真預(yù)示值的數(shù)值曲線實(shí)時(shí)對(duì)比分析,對(duì)后續(xù)的飛行狀態(tài)進(jìn)行預(yù)示。基于模型的供配電系統(tǒng)狀態(tài)監(jiān)測與預(yù)示技術(shù)邏輯圖如圖3所示。
建立系統(tǒng)的工作模型為
xk+1=f(xk,u,w,Δ)
(3)
式中:xk為k時(shí)刻模型計(jì)算值,xk+1為k+1時(shí)刻模型計(jì)算值,u為按飛行程序指令輸入,w為外部干擾信號(hào),Δ為模型不確定度。
考慮模型不確定度Δ,利用航天器的在軌遙測數(shù)據(jù),使用高斯過程對(duì)模型的不確定度進(jìn)行建模為
Δ(·)~GP(m(·),j(·,·))
(4)
式中:GP()表示高斯過程模型,m(·)表示高斯過程的均值函數(shù),j(·,·)表示高斯過程的協(xié)方差函數(shù)。

圖3 基于模型的供配電系統(tǒng)狀態(tài)監(jiān)測與預(yù)示技術(shù)Fig.3 Model-based electrical system state monitor and prediction technology
通過學(xué)習(xí)歷史遙測數(shù)據(jù)的特點(diǎn),訓(xùn)練高斯過程模型對(duì)具有周期特性的不確定度進(jìn)行估計(jì)與預(yù)測,實(shí)時(shí)更新與補(bǔ)償仿真系統(tǒng)的動(dòng)態(tài)模型,從而使仿真系統(tǒng)接近航天器電氣系統(tǒng)真實(shí)的工作情況。通過高斯過程補(bǔ)償不確定度Δ可以提高系統(tǒng)模型精度,能夠進(jìn)一步提高卡爾曼濾波器性能。利用基于高斯過程學(xué)習(xí)的改進(jìn)擴(kuò)展卡爾曼濾波算法為
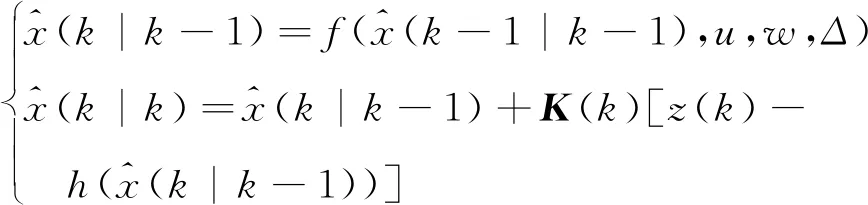
(5)

通過在軌遙測數(shù)據(jù)對(duì)仿真估計(jì)值進(jìn)行實(shí)時(shí)估計(jì)和更新,從而能夠獲得參數(shù)的預(yù)測值。再通過對(duì)歷史數(shù)據(jù)的學(xué)習(xí)來補(bǔ)償模型不確定度,從而提高仿真模型的估計(jì)精度,進(jìn)一步基于貝葉斯理論可以得到未來系統(tǒng)狀態(tài)運(yùn)行的預(yù)測區(qū)間,取未來狀態(tài)預(yù)測的均值作為預(yù)測結(jié)果,進(jìn)而可以對(duì)航天器供配電系統(tǒng)的在軌健康狀況進(jìn)行預(yù)示。
3 航天器供配電系統(tǒng)數(shù)字伴飛應(yīng)用實(shí)踐
依據(jù)Chang’e-5供配電系統(tǒng)電路拓?fù)洌捎肕odelica多學(xué)科建模語言建立了在軌數(shù)字伴飛系統(tǒng)的數(shù)學(xué)模型,如圖4所示。航天器供配電數(shù)字伴飛系統(tǒng)在Chang’e-5的整器熱試驗(yàn)和無線聯(lián)試中進(jìn)行了應(yīng)用。
在地面測試期間,按照2.1節(jié)模型修正方法,針對(duì)不同的模型參數(shù),結(jié)合設(shè)計(jì)數(shù)據(jù)、測試數(shù)據(jù)和熱試驗(yàn)數(shù)據(jù)對(duì)模型結(jié)構(gòu)或參數(shù)進(jìn)行修正。以負(fù)載功率參數(shù)為例,設(shè)計(jì)階段采用設(shè)計(jì)值進(jìn)行建模;在產(chǎn)品研制后采用驗(yàn)收數(shù)據(jù)對(duì)設(shè)計(jì)數(shù)據(jù)進(jìn)行更新;在熱試驗(yàn)期間,通過對(duì)設(shè)備加斷電時(shí)序進(jìn)行分析,獲得用電負(fù)載在高低溫條件下的功耗,建立溫度與功耗之間的關(guān)系,修正原有模型中常溫下用電負(fù)載功耗數(shù)據(jù),通過不斷修正和調(diào)整,得到更加精確的負(fù)載模型。不同階段測試數(shù)據(jù)對(duì)負(fù)載模型修正方法如表1所示。
整器熱試驗(yàn)過程,對(duì)Chang’e-5著陸器-上升器組合體在環(huán)月段及動(dòng)力下降段低溫循環(huán)工況進(jìn)行了仿真分析,并根據(jù)飛行程序?qū)?dòng)力下降過程的太陽電池陣輸出功率、蓄電池組電壓、蓄電池組放電深度等供配電系統(tǒng)重要參數(shù)進(jìn)行了實(shí)時(shí)仿真,參數(shù)仿真結(jié)果與實(shí)際測試結(jié)果間的平均誤差小于2%。
在與飛行控制中心無線聯(lián)試期間,按照Chang’e-5飛行程序?qū)Ω黠w行階段供配電數(shù)字模型進(jìn)行了全面驗(yàn)證。一方面通過仿真值與遙測值比對(duì),對(duì)超出閾值范圍的參數(shù)進(jìn)行提示,如圖5(a)所示。另一方面,通過對(duì)關(guān)鍵參數(shù)的地面歷史測試數(shù)據(jù)、實(shí)時(shí)仿真數(shù)據(jù)和實(shí)時(shí)遙測數(shù)據(jù)進(jìn)行比對(duì)。如圖5(b)所示,以蓄電池組電壓為例,綠色曲線代表在熱試驗(yàn)期間相同工況的測試數(shù)據(jù)曲線,紅色曲線代表實(shí)時(shí)遙測數(shù)值,藍(lán)色曲線表示實(shí)時(shí)仿真數(shù)據(jù)曲線,黃色曲線代表基于實(shí)時(shí)遙測數(shù)據(jù)和后續(xù)飛行程序的預(yù)示曲線,其中測試數(shù)據(jù)僅作為參考。從圖5中可以看出,蓄電池組電壓仿真值與實(shí)時(shí)遙測數(shù)據(jù)具有較好的一致性,穩(wěn)態(tài)工況下最大誤差小于5%,平均誤差小于2%,驗(yàn)證了伴飛系統(tǒng)及模型的正確性、穩(wěn)定性,為后續(xù)在軌應(yīng)用奠定了堅(jiān)實(shí)基礎(chǔ)。

注:GNC為制導(dǎo)、導(dǎo)航與控制。圖4 嫦娥五號(hào)數(shù)字伴飛系統(tǒng)示意圖Fig.4 Digital companion system for Chang’e-5 probe

表1 不同階段測試數(shù)據(jù)對(duì)負(fù)載模型修正方法示例Table 1 Model adjustment method of electrical load using test data during different period
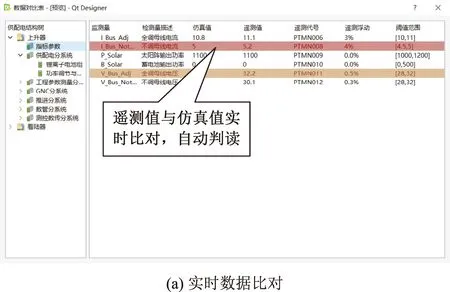
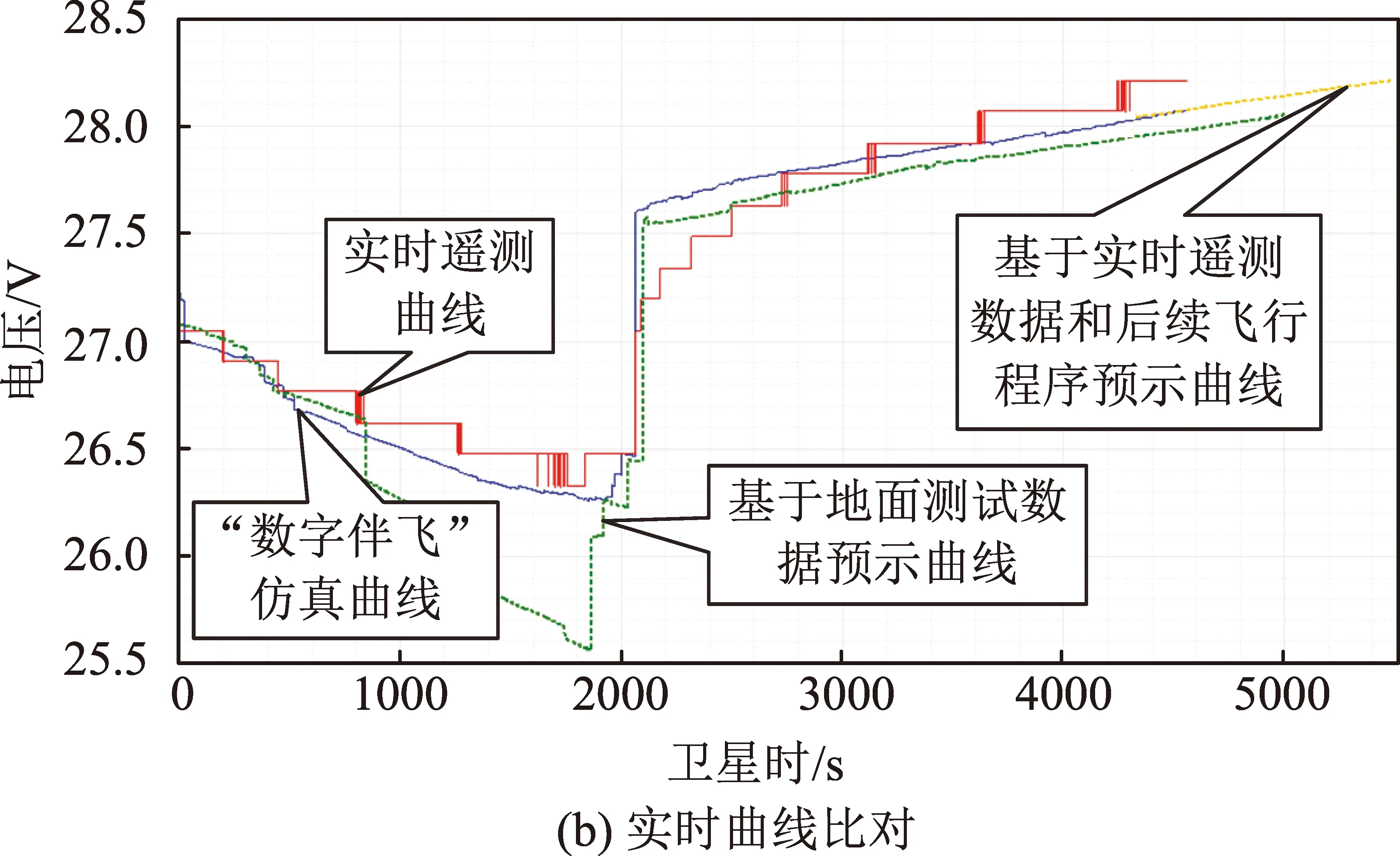
圖5 數(shù)字伴飛仿真數(shù)據(jù)與遙測數(shù)據(jù)實(shí)時(shí)判讀比對(duì)Fig.5 Real-time comparison of digital companion simulation data and telemetry data
4 結(jié)束語
本文提出了航天器供配電數(shù)字伴飛系統(tǒng)的概念、內(nèi)涵與功能要點(diǎn),明確了可行的數(shù)字化模型和飛行事件/程序驅(qū)動(dòng)的仿真策略是開展“數(shù)字伴飛”的基礎(chǔ),實(shí)現(xiàn)“數(shù)字伴飛”的2項(xiàng)關(guān)鍵技術(shù)。通過建立Chang’e-5供配電數(shù)學(xué)模型,并在整器熱試驗(yàn)和無線聯(lián)試中進(jìn)行了應(yīng)用驗(yàn)證,對(duì)開展航天器供配電系統(tǒng)“數(shù)字伴飛”做了有益的嘗試,具有如下應(yīng)用價(jià)值。
(1)采用“數(shù)字孿生”思想,將航天器供配電系統(tǒng)數(shù)字模型與物理實(shí)物相關(guān)聯(lián),可有效輔助供配電系統(tǒng)地面測試及在軌飛控過程的數(shù)據(jù)判讀,有助于全面掌握各飛行階段航天器供配電系統(tǒng)狀態(tài)。
(2)可信的模型是開展“數(shù)字伴飛”的基礎(chǔ),通過地面測試階段的海量數(shù)據(jù),對(duì)航天器供配電系統(tǒng)仿真模型進(jìn)行修正;基于可信的模型,可用于輔助地面測試方案分析與驗(yàn)證、飛行程序演練、在軌飛行過程參數(shù)判讀、在軌故障預(yù)案仿真驗(yàn)證等,為基于模型的供配電數(shù)字化設(shè)計(jì)與驗(yàn)證提供參考。
隨著航天任務(wù)復(fù)雜程度的日趨提升,數(shù)字伴飛系統(tǒng)將在航天器飛控過程中將發(fā)揮越來越重要的作用。后續(xù)可進(jìn)一步深入開展數(shù)學(xué)模型可信度評(píng)估、供配電系統(tǒng)在軌健康度評(píng)估與預(yù)測等方面研究,對(duì)航天器供配電數(shù)字伴飛系統(tǒng)的進(jìn)一步更新和完善,為航天供配電系統(tǒng)設(shè)計(jì)與在軌管理任務(wù)的實(shí)施提供更有力的支撐和保障。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19