一種虛擬信標節(jié)點機制的DV-Hop定位改進算法
2020-10-14 01:03:58胡平霞龔靜丁鋒張玉平
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用 2020年10期
關(guān)鍵詞:實驗
◆胡平霞 龔靜 丁鋒 張玉平
一種虛擬信標節(jié)點機制的DV-Hop定位改進算法
◆胡平霞 龔靜 丁鋒 張玉平
(湖南環(huán)境生物職業(yè)技術(shù)學(xué)院 湖南 421001)
本文為提高無線傳感器網(wǎng)絡(luò)中非測距定位算法DV-Hop的定位精度,特提出一種通過信標節(jié)點移動形成虛擬信標節(jié)點的VADV-Hop改進算法,優(yōu)化信標節(jié)點部署位置,使用網(wǎng)絡(luò)平均跳距校正信標節(jié)點平均跳距。仿真實驗表明VADV-Hop算法在不增加信標節(jié)點數(shù)量上表現(xiàn)出較穩(wěn)定的定位精度。
無線傳感器網(wǎng)絡(luò);定位;平均跳距;虛擬信標節(jié)點
無線傳感器網(wǎng)絡(luò)(Wireless Sensor Network, WSN)是由靜止或移動的傳感器節(jié)點以自組織和多跳的方法組成的無線網(wǎng)絡(luò),是一種集感知數(shù)據(jù)、采集數(shù)據(jù)、處理數(shù)據(jù)、傳輸數(shù)據(jù)等技術(shù)實現(xiàn)物理世界與信息世界數(shù)據(jù)交互的一種分布式網(wǎng)絡(luò)系統(tǒng)。傳感器節(jié)點返回的數(shù)據(jù)包含位置信息,沒有位置的數(shù)據(jù)實用價值很低,因此傳感器節(jié)點定位技術(shù)是WSN的關(guān)鍵技術(shù)之一,其定位精度直接影響WSN的發(fā)展和應(yīng)用。
根據(jù)定位過程中是否要測量未知節(jié)點和信標節(jié)點間的距離,把定位方法劃分為基于測距定位(Range-based)方法和免測距定位(Range-free)方法[1]。其中免測距定位方法由于其低成本、易實現(xiàn)等特點得到很多研究者關(guān)注。常用免測距定位方法有DV-Hop算法[2]、質(zhì)心算法[3]、APIT(Approximate Point-in-Triangulation Test)算法[4]、凸規(guī)劃(Convex)算法[5]等,它們都是通過已知節(jié)點位置信息實現(xiàn)對未知節(jié)點的定位。
1 DV-Hop算法
美國Lutegesi大學(xué)的Dragons Niculescu等人在2003年提出DV-hop(Distance Vector-Hop)算法采用距離矢量路由機制定位,是一種基于多跳測距的免距離測距方法[2]。DV-Hop算法是目前研究較多的免測距算法,該算法通過信標節(jié)點位置估算未知節(jié)點位置,然后信標節(jié)點的數(shù)量在實際應(yīng)用中受到成本限制,因此本文在DV-Hop算法思想上提出一種基于虛擬信標節(jié)點技術(shù)的改進算法。
1.1 定位過程
DV-Hop算法節(jié)點定位過程[6]如下:
(1)確定信標節(jié)位置及最小跳數(shù)
通過信標節(jié)點廣播的數(shù)據(jù)包,信標節(jié)點確定其他信標節(jié)點坐標及最小跳數(shù),未知節(jié)點確定信標節(jié)點坐標及最小跳數(shù)。
(2)確定平均跳據(jù),估算距離
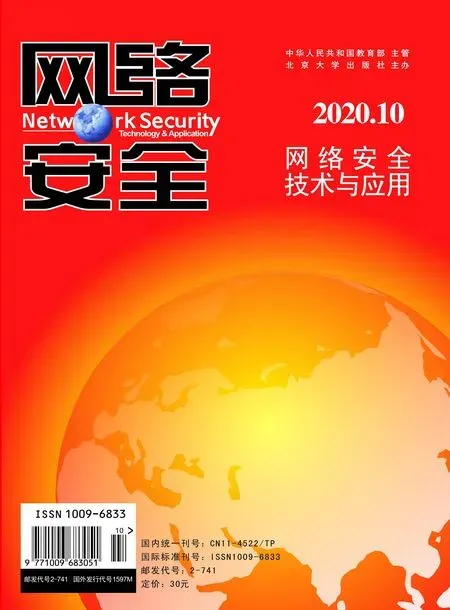
使用信標節(jié)點的位置坐標及信標節(jié)點間的最小跳數(shù),通過公式1來計算信標節(jié)點的平均跳距,使用平均跳距結(jié)合公式2計算未知節(jié)點到信標節(jié)點的距離。
節(jié)點的坐標表示為(x,y),節(jié)點的坐標表示為(x,y),、均為網(wǎng)絡(luò)中的信標節(jié)點。信標h表示二節(jié)點、間的最小跳數(shù),表示、間的跳距平均值。

HopSize是未知節(jié)點選用最鄰近信標節(jié)點的跳距平均值,hop是未知節(jié)點到信標節(jié)點的最小跳數(shù)值。
(3)確定未知節(jié)點位置
未知節(jié)點在獲得2個以上跟信標節(jié)點的參考距離后,使用相應(yīng)信標節(jié)點坐標(x,y)及d,轉(zhuǎn)換成線性方程,通過數(shù)學(xué)方法(最小二乘法)計算得到未知節(jié)點位置坐標。
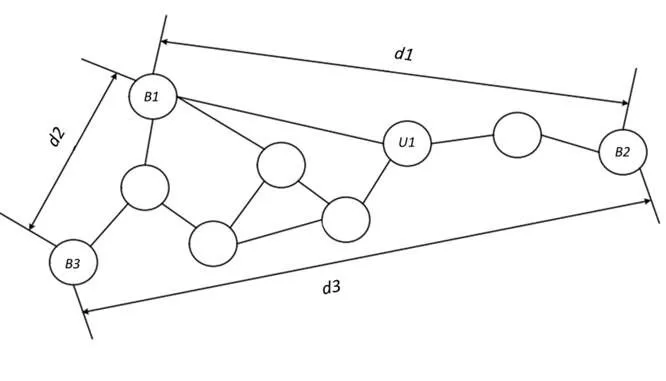
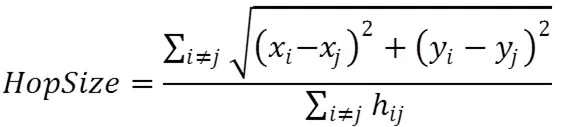
圖1 DV-Hop估算示意圖
圖1中U為需要定位的未知節(jié)點,通過已知節(jié)點即信標節(jié)點BBB的位置信息來測算U的位置。首先BBB通過洪泛算法進行廣播,各節(jié)點保存最小跳數(shù)信息。其次BBB節(jié)點計算自身平均跳距,U使用最鄰近的節(jié)點B平均跳距作為自身跳距平均值分別計算到信標節(jié)點的距離。最后建立位置矩陣,通過最小二乘法計算U的坐標。
1.2 算法分析
1.2.1客觀條件分析
現(xiàn)實應(yīng)用場景的無線傳感器網(wǎng)絡(luò),存在以下客觀條件:
(1)異常節(jié)點問題
異常節(jié)點是部署在邊緣的節(jié)點或是被孤立的節(jié)點,這些節(jié)點的位置信息影響定位精度。
(2)節(jié)點密度問題
由于受節(jié)點分布密度的影響,最小跳數(shù)和平均跳距誤差造成的差異會造成節(jié)點定位累積誤差,從而影響算法定位精度[7]。
1.2.2定位誤差分析
DV Hop算法定位誤差主要有:
(1)節(jié)點跳數(shù)產(chǎn)生的誤差
在DV-Hop定位過程中使用節(jié)點間的最小跳數(shù)來估算距離,誤差主要產(chǎn)生在以下兩個方面,一是跳數(shù)值越小表示距離越近,實則不然;二是可感知的鄰節(jié)點間的跳數(shù)為一跳,默認估算距離相等,實際上由于節(jié)點分布不均,相鄰節(jié)點間的距離并不相等。
(2)平均跳距產(chǎn)生的誤差
在DV-Hop定位過程中信標節(jié)點間的平均跳距通過最小跳數(shù)計算得到,由于最小跳數(shù)存在誤差,平均跳距也將存在誤差;未知節(jié)點使用最鄰近信標節(jié)點跳距均值作為自身跳距均值,本身就存在一定算法允許內(nèi)的誤差。
(3)計算定位誤差
使用數(shù)學(xué)方法(最小二乘法)求未知節(jié)點位置時,由于計算公式中的估算距離存在誤差,因此計算結(jié)果也會存在誤差。
2 提出改進算法
根據(jù)DV-Hop算法定位過程中存在的客觀條件和誤差分析,結(jié)合MADV-Hop[9]算法思想提出一種改進算法VADV-Hop,通過信標節(jié)點一定軌跡運動形成虛擬信標節(jié)點,未知節(jié)點參考多個信標節(jié)點信息估算位置坐標,然后取平均值。通過全網(wǎng)平均跳距校正節(jié)點平均跳距,在減少信標節(jié)點開銷的同時提高定準精度。
2.1 基于虛擬信標節(jié)點的改進
在DV-Hop算法基礎(chǔ)上,部署少量信標節(jié)點,信標節(jié)點按一定軌跡運動,每到一個新的位置形成一個新的信標節(jié)點,稱為虛擬信標節(jié)點,計算該信標節(jié)點位置,通過多個虛擬信標節(jié)點位置信息平均值降低計算誤差。
VADV-Hop算法信標節(jié)點分布見圖2,在R x R的監(jiān)測范圍中部署9個信標節(jié)點,確定位置,其中B-B為可移動信標節(jié)點,B為靜態(tài)信標節(jié)點,位置信息描述如下:

表1 m×m的區(qū)域中信標節(jié)點位置坐標
圖2 VADV-Hop信標節(jié)點分布

2.2 平均跳距校正
得到信標節(jié)點平均跳距以后,計算全網(wǎng)平均跳距誤差,利用該誤差值修正平均跳距。

h是信標節(jié)點和信標節(jié)點之間的跳數(shù)最小值,是每跳距離平均值:

為校正權(quán)值,取值為區(qū)間為(-0.5,0.5),使用校正后的平均跳距計算未知節(jié)點到信標節(jié)點的距離估值,使其更接近真實值。

2.3 VADV-Hop算法定位流程
VADV-Hop算法定位方法描述如圖3所示,未具體描述的環(huán)節(jié)保持跟DV-Hop算法一致,重點對從計算平均跳距后有變動的定位步驟進行描述。
(1)開始定位。
(2)信標節(jié)點使用洪泛算法廣播發(fā)送位置信息數(shù)據(jù)包,廣播次數(shù)為4次。
(3)鄰節(jié)點處理到達的數(shù)據(jù)包。
(4)計算跳距均值并校正,校正方法如公式3、公式4。
(5)計算節(jié)點間距值,使用校正后的平均跳距利用公式5計算未知節(jié)點與信標節(jié)點的距離。
(6)計算未知節(jié)點位置。
(7)信標節(jié)點按△d沿預(yù)設(shè)運動軌道運動形成虛擬信標節(jié)點,判斷位置是否重復(fù),不重復(fù)則確定當前位置為有效位置,更新位置后返回第(2)步。
(8)在未知節(jié)點取3次以上自身坐標平均值。
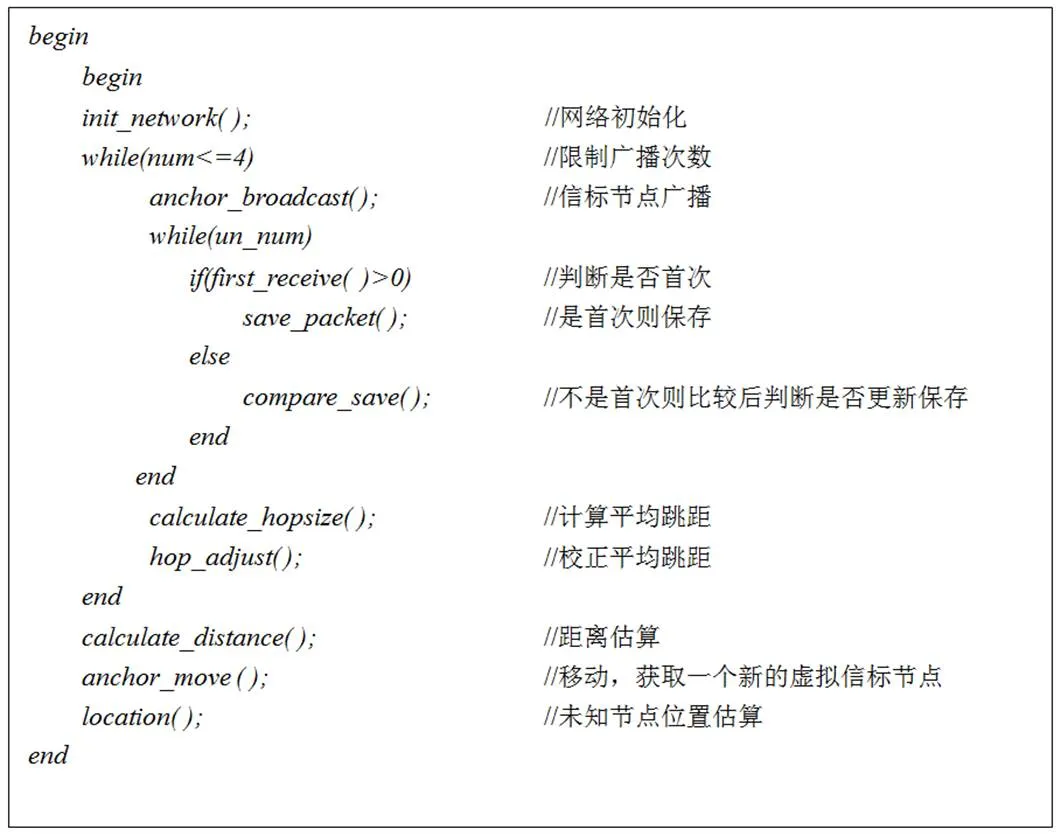
圖3 VADV-Hop算法描述
3 VADV-Hop算法性能分析
3.1 仿真場景說明
使用Matlab軟件進行仿真實驗,仿真參數(shù)見表2。針對VADV-Hop算法的仿真實驗均進行了100次,每一次仿真實驗在相同仿真場景前提下對原算法也進行了對比實驗,使用100次定位結(jié)果的位置均值進行對比分析。未知節(jié)點在R x R的監(jiān)測范圍內(nèi)呈隨機分布,如圖4所示。

表2 VADV-Hop 仿真實驗參數(shù)設(shè)置
3.2 仿真實驗結(jié)果分析
(1)定位誤差分析
通過在相同模擬網(wǎng)絡(luò)場景下的對比實驗發(fā)現(xiàn),基于虛擬信標節(jié)點的改進算法性能相對原算法有所提升。如圖5所示,改進后的算法定位誤差在3%到24%之間,誤差曲線基本保持在10%到20%之間,誤差震蕩較小。
(2)通信半徑對定位結(jié)果影響分析
在相同模擬場景下,調(diào)整通信半徑,保持其他參數(shù)不變,對改進算法定位精度進行仿真實驗。仿真數(shù)據(jù)結(jié)果顯示,VADV-Hop算法和原算法在改變通信半徑后定位精密度都受到了影響,其中原算法和VADV-Hop算法在較小通信半徑下定位精密度較低,VADV-Hop算法在半徑值達到一定值時(本實驗中的數(shù)值為30 m)后,表現(xiàn)出較穩(wěn)定的定位精度。
(3)未知節(jié)點數(shù)量對定位結(jié)果影響分析
在相同模擬場景下,改變投放的未知節(jié)點數(shù)量,其他參數(shù)不做調(diào)整,進行仿真實驗。
布置的信標節(jié)點數(shù)量未做調(diào)整,DV-Hop算法和VADV-Hop算法的定位精密度都隨著未知節(jié)點的數(shù)量發(fā)生變化。VADV-Hop算法由于采用了虛擬信標節(jié)點技術(shù),增加了位置參考信息,在125個未知節(jié)點前定位性能較好,繼續(xù)增大未知節(jié)點數(shù)量后,定位誤差顯著上升。

圖7 未知節(jié)點數(shù)量對定位精度影響分析
4 結(jié)語
VADV-Hop算法在傳統(tǒng)DV-Hop算法的基礎(chǔ)上,通過信標節(jié)點的運動形成多個虛擬信標節(jié)點,一定程度上增加了未知節(jié)點的參考信息,通過模擬場景下的仿真實驗表示,VADV-Hop算法跟原算法比,在不增加信標節(jié)點的基礎(chǔ)上,算法性能穩(wěn)定,定位精度較有所提升,算法復(fù)雜性增加。
由于實驗都是在仿真環(huán)境下特定的網(wǎng)絡(luò)場景中估算未知節(jié)點的位置,未知節(jié)點數(shù)量保持在100附近。實際應(yīng)用中的WSN都是三維空間,網(wǎng)絡(luò)場景差異性很大,通信條件、戶外干擾等問題都會對算法的性能產(chǎn)生影響,因此后續(xù)將對三維場景的VADV-Hop算法進行研究。
[1]CHENG XIUZHEN,SHU HAWING,LIANG QILIAN,et al. Silent positioning in underwater acoustic sensor networks[C]//IEEE Transactions on Vehicular Technology. IEEE,2008:1756-1766.
[2]Niculescu D,Nath B.DV Based Positioning in Ad Hoc Networks[J]. Telecommunication Systems,2003,22(1-4):267-280.
[3]Bulusu N,Heidemann J,Estrin D. GPS-less Low Cost Outdoor Localization for Very Small Devices [J].Institute of Electrical and Electronics Engineers Personal Communications Magazine,2000(5):28-34.
[4]Wang Z J,Jin H. Improvement on APIT Localization Algorithms for Wireless Sensor Networks:Networks Security, Wireless Communications And Trusted Computing,2009[C].International Conference on IEEE,2009(1):719-723.
[5]Doherty L,El Ghaoui L. Convex Position Estimation in Wireless Sensor Networks [C].Twentieth Annual Joint Conference of the IEEE Computer and Communications Societies,2001:1655-1663.
[6]Lv X,Sun X,Zhou X,et al. DV-hop-MSO Based Localization Algorithm in Wireless SensorNetworks[M]//Advances in Wireless Sensor Networks. Springer Berlin Heidelberg,2014:312-316.
[7]于泉.無線傳感器網(wǎng)絡(luò)中DV-Hop改進算法的研究[D].江南大學(xué),2016.
[8]馮友兵,馬艷,魏玉婷.基于移動錨節(jié)點的改進DV-Hop算法[[J].計算機科學(xué),2015,42(s2):277-279.
衡陽市科技計劃項目(2016KJ20)、湖南省教育廳科學(xué)研究項目(16C0565)、衡陽市社會科學(xué)聯(lián)合會(2017D107)、湖南環(huán)境生物職業(yè)技術(shù)學(xué)院支柱工程項目(湘環(huán)院教字〔2017〕46號)。
猜你喜歡
作文·小學(xué)低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學(xué)生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學(xué)低年級(2024年2期)2024-04-29 00:00:00
作文·小學(xué)低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55