神經(jīng)網(wǎng)絡(luò)在自由曲線插補(bǔ)中的應(yīng)用初探
2020-10-14 01:03:50鄭斌
網(wǎng)絡(luò)安全技術(shù)與應(yīng)用 2020年10期
◆鄭斌
神經(jīng)網(wǎng)絡(luò)在自由曲線插補(bǔ)中的應(yīng)用初探
◆鄭斌
(西藏民族大學(xué)教育學(xué)院 陜西 712082)
由于運(yùn)用NURBS曲線插補(bǔ)中求導(dǎo)具有誤差較大、計(jì)算繁多、較為復(fù)雜等問(wèn)題,因此提出采用神經(jīng)網(wǎng)絡(luò)對(duì)自由曲線進(jìn)行插補(bǔ),以弓高誤差作為約束條件,建立起一個(gè)進(jìn)給步長(zhǎng)可變的神經(jīng)網(wǎng)絡(luò)數(shù)控插補(bǔ)的模型。本文主要研究了利用神經(jīng)網(wǎng)絡(luò)的非線性逼近及其自主學(xué)習(xí)的能力,通過(guò)對(duì)未知方程式曲線的辨識(shí),實(shí)現(xiàn)對(duì)未知表達(dá)式曲線的插補(bǔ)。經(jīng)過(guò)理論研究以及仿真試驗(yàn)表明,這樣的方法能夠較好的完成這一類曲線的插補(bǔ)。
神經(jīng)網(wǎng)絡(luò);自由曲線;數(shù)控插補(bǔ)
1 引言
自由曲線主要是指部分不能用數(shù)學(xué)公式進(jìn)行表示,但能夠通過(guò)一些散點(diǎn)連接形成的光滑曲線來(lái)表示的曲線。現(xiàn)階段,大多數(shù)自由曲線的分析都使用NURBS曲線模型進(jìn)行研究,經(jīng)過(guò)分析后得到該曲線的表達(dá)式,再按照得到的式子進(jìn)行插補(bǔ)操作。然而,NURBS曲線建模法存在諸多的弊端,例如:計(jì)算量較大、結(jié)果誤差較大、要對(duì)數(shù)學(xué)基礎(chǔ)知識(shí)的掌握過(guò)硬等等,從而給自由曲線的插補(bǔ)帶來(lái)了極大的困難。
基于對(duì)自由曲線研究的現(xiàn)狀問(wèn)題,可以利用神經(jīng)網(wǎng)絡(luò)對(duì)其進(jìn)行插補(bǔ)操作。作為一種較為靈活的邊緣性交叉科目,神經(jīng)網(wǎng)絡(luò)有著并行運(yùn)算的優(yōu)勢(shì),能夠極大減少用于對(duì)自由曲線插補(bǔ)的時(shí)間。此外,神經(jīng)網(wǎng)絡(luò)還具有非線性逼近及其自主學(xué)習(xí)的能力,因此可以對(duì)不同的曲線或者離散點(diǎn)進(jìn)行插補(bǔ),具有較為廣泛的應(yīng)用。神經(jīng)網(wǎng)絡(luò)能夠彌補(bǔ)其他插補(bǔ)方式的一些不足之處,保證了自由曲線插補(bǔ)的高效性以及準(zhǔn)確性。本文主要利用神經(jīng)網(wǎng)絡(luò)對(duì)未知方程式曲線的辨識(shí),從而實(shí)現(xiàn)對(duì)位置表達(dá)式曲線的插補(bǔ)。
2 神經(jīng)網(wǎng)絡(luò)中的算法與參數(shù)分析
現(xiàn)階段,大部分工程當(dāng)中都是把神經(jīng)網(wǎng)絡(luò)當(dāng)作控制器來(lái)應(yīng)用,其實(shí)現(xiàn)的功能就是通過(guò)對(duì)網(wǎng)絡(luò)間連接權(quán)值的改變,使得網(wǎng)絡(luò)結(jié)構(gòu)產(chǎn)生改變,最終保證輸入和輸出符合相關(guān)的需求。神經(jīng)網(wǎng)絡(luò)技術(shù)具有各種各樣的結(jié)構(gòu)以及算法,其中,應(yīng)用較為廣泛的是基于BP算法的多層前饋神經(jīng)網(wǎng)絡(luò),并且此種算法發(fā)展得較為成熟。算法過(guò)程如下:
(1)首先進(jìn)行初始化,隨機(jī)產(chǎn)生不同的連接權(quán)[]、[]和閾值θ、r;
(2)根據(jù)已有的輸入輸出模式,進(jìn)行隱層以及輸出層等單元的輸出計(jì)算:


(3)選擇下一個(gè)輸入模式,返回步驟(2)操作,當(dāng)網(wǎng)絡(luò)輸出誤差滿足要求則結(jié)束訓(xùn)練。
通過(guò)以上步驟,權(quán)值的不斷修正使網(wǎng)絡(luò)的誤差符合要求。這時(shí)網(wǎng)絡(luò)訓(xùn)練基本結(jié)束,當(dāng)訓(xùn)練結(jié)束后,神經(jīng)網(wǎng)絡(luò)進(jìn)入到后續(xù)的使用當(dāng)中。
3 構(gòu)建未知表達(dá)式的神經(jīng)網(wǎng)絡(luò)辨識(shí)模型
在對(duì)未知表達(dá)式模型進(jìn)行處理的過(guò)程中,首先利用激光掃描或坐標(biāo)測(cè)量?jī)x等工具對(duì)模型進(jìn)行測(cè)量,得到各個(gè)特征點(diǎn)的坐標(biāo)值;然后通過(guò)神經(jīng)網(wǎng)絡(luò)的非線性逼近及其自主學(xué)習(xí)的能力,根據(jù)已有的數(shù)據(jù)點(diǎn)對(duì)神經(jīng)網(wǎng)絡(luò)進(jìn)行訓(xùn)練和檢驗(yàn),以便完成利用神經(jīng)網(wǎng)絡(luò)對(duì)未知表達(dá)式曲線的模擬操作。
(1)辨識(shí)模型的結(jié)構(gòu)
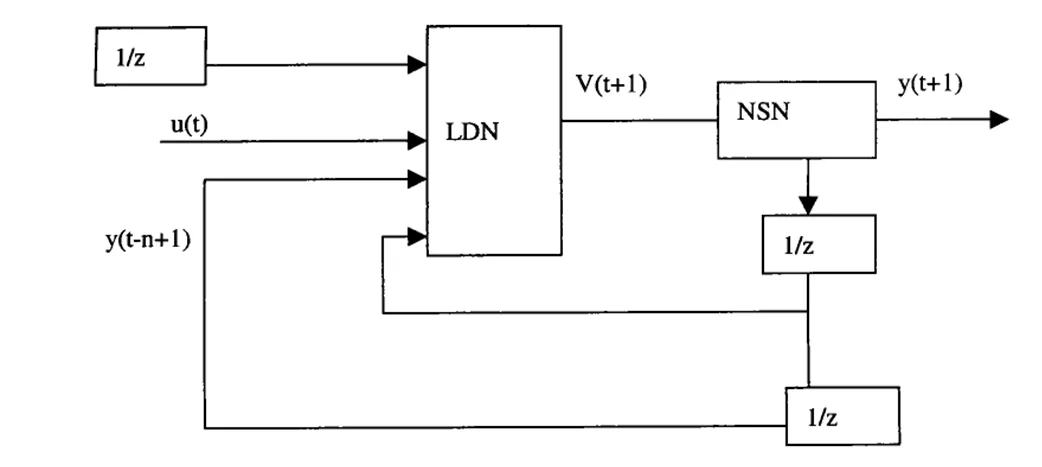
圖1 NDNN模型結(jié)構(gòu)圖(u表示系統(tǒng)的輸入,y表示系統(tǒng)的輸出)
根據(jù)圖一所示的非線性動(dòng)態(tài)的神經(jīng)網(wǎng)絡(luò)線性動(dòng)態(tài)網(wǎng)絡(luò)(LDN)和線性靜態(tài)網(wǎng)絡(luò)(NSN)的模型,可以看出根據(jù)兩者的不同特點(diǎn)對(duì)系統(tǒng)起到不同的作用。其中要對(duì)系統(tǒng)的動(dòng)態(tài)特征加以學(xué)習(xí),對(duì)非線性靜態(tài)網(wǎng)絡(luò)進(jìn)行優(yōu)化,可以對(duì)系統(tǒng)的非線性關(guān)系加以映射。如此,兩者結(jié)合起來(lái)能夠用簡(jiǎn)單的網(wǎng)絡(luò)結(jié)果和較少的計(jì)算量、訓(xùn)練量,使得未知結(jié)構(gòu)的非線性動(dòng)態(tài)特征達(dá)到最佳狀態(tài)。
(2)網(wǎng)絡(luò)的學(xué)習(xí)過(guò)程
網(wǎng)絡(luò)的學(xué)習(xí)過(guò)程,其核心內(nèi)容就是對(duì)網(wǎng)絡(luò)不斷進(jìn)行訓(xùn)練,通過(guò)改正其連接權(quán)值,保證網(wǎng)絡(luò)的實(shí)際輸出能夠和理想的輸出精度要求相符合。此外,在神經(jīng)網(wǎng)絡(luò)插補(bǔ)控制器進(jìn)行學(xué)習(xí)訓(xùn)練的時(shí)候,可以利用fANN模板和插補(bǔ)控制器CANN連接的形式,實(shí)現(xiàn)對(duì)網(wǎng)絡(luò)的學(xué)習(xí)過(guò)程。通過(guò)此種形式,能夠很好省去學(xué)習(xí)過(guò)程中產(chǎn)生的中間數(shù)據(jù),這樣就極大提高了網(wǎng)絡(luò)學(xué)習(xí)的質(zhì)量和效率。
4 構(gòu)建數(shù)控插補(bǔ)的神經(jīng)網(wǎng)絡(luò)控制模型
在對(duì)曲線模型進(jìn)行插補(bǔ)的過(guò)程中,利用刀具在進(jìn)行插補(bǔ)的時(shí)候,其速度方向也在不斷發(fā)生變化。然而,由于刀具加工的速度不會(huì)無(wú)限增大,所以我們需要分別得出x、y軸的分速度變化曲線。然后對(duì)x、y兩軸的速度進(jìn)行計(jì)算,以便利用兩軸聯(lián)動(dòng)來(lái)帶動(dòng)刀具不斷朝著不同的方向進(jìn)行插補(bǔ)。
其中,在每一段的插補(bǔ)內(nèi),x、y軸的運(yùn)動(dòng)速度計(jì)算公式為:
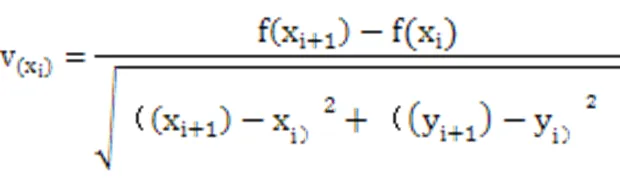
其中,f()表示刀具的進(jìn)給速度,可以按照具體的加工情況進(jìn)行精準(zhǔn)地確定。
(1)網(wǎng)絡(luò)結(jié)構(gòu)分析
利用神經(jīng)網(wǎng)絡(luò)fANN對(duì)自由曲線進(jìn)行構(gòu)建分析后,在對(duì)其進(jìn)行插補(bǔ)的過(guò)程中,能夠利用fANN模塊在不同點(diǎn)處獲得的數(shù)據(jù)信息,并且得到在不同插補(bǔ)段內(nèi)X軸與Y軸的運(yùn)動(dòng)速度,實(shí)現(xiàn)對(duì)兩軸的驅(qū)動(dòng),以便完成兩軸之間的聯(lián)動(dòng),這樣就可以推動(dòng)刀具朝著不同的方向進(jìn)行插補(bǔ),從而確定刀具運(yùn)動(dòng)到的每一個(gè)定位點(diǎn),其中,定位點(diǎn)的坐標(biāo)需要變?yōu)橹苯亲鴺?biāo)的形式。
通過(guò)對(duì)網(wǎng)絡(luò)結(jié)構(gòu)的分析,其輸入層里面存在兩個(gè)神經(jīng)元,分別與x軸、y軸的數(shù)值相對(duì)應(yīng),輸出層存在四個(gè)神經(jīng)元,分別與x軸、y軸的數(shù)值及其插補(bǔ)后的x軸、y軸的速度相對(duì)應(yīng),這樣就得到了一個(gè)單隱層的網(wǎng)絡(luò)結(jié)構(gòu)模型,其隱層的單元數(shù)設(shè)置為七。神經(jīng)網(wǎng)絡(luò)的插補(bǔ)控制器可以用CANN來(lái)表示。
(2)網(wǎng)絡(luò)的數(shù)控插補(bǔ)原理
在周期插補(bǔ)的過(guò)程中,需要將未知表達(dá)式曲線上的點(diǎn)全部輸入到fANN里面,這樣就能夠在fANN輸入端獲取相應(yīng)的坐標(biāo)值,將其作為插補(bǔ)控制器的輸入數(shù)據(jù)。把數(shù)據(jù)輸入到CANN里面的時(shí)候,可以得到實(shí)際的輸出結(jié)果,也就是下一個(gè)插補(bǔ)點(diǎn)的坐標(biāo)值及其相關(guān)的運(yùn)動(dòng)速度,這樣就能夠獲取插補(bǔ)周期的控制命令。把此控制命令傳輸?shù)綑C(jī)床的CNC控制系統(tǒng)里面,完成周期的插補(bǔ)操作過(guò)程。最后,把插補(bǔ)周期過(guò)程中得到的輸出端的數(shù)據(jù)值進(jìn)行反饋,將此輸出值作為插補(bǔ)器的輸入端,進(jìn)行重復(fù)訓(xùn)練,從而實(shí)現(xiàn)完整的插補(bǔ)運(yùn)算過(guò)程。
5 進(jìn)行仿真實(shí)驗(yàn)和結(jié)果分析
為了進(jìn)一步證明構(gòu)建的神經(jīng)網(wǎng)絡(luò)插補(bǔ)模型的科學(xué)性以及準(zhǔn)確性,可以利用MATLAB仿真軟件進(jìn)行測(cè)試。依據(jù)仿真的結(jié)果可以得出,利用神經(jīng)網(wǎng)絡(luò)的非線性逼近及其自主學(xué)習(xí)的能力,通過(guò)對(duì)未知方程式曲線的辨識(shí),能夠?qū)崿F(xiàn)對(duì)未知表達(dá)式曲線的插補(bǔ)過(guò)程。
目前,一般都應(yīng)用神經(jīng)網(wǎng)絡(luò)的插補(bǔ)器進(jìn)行相關(guān)運(yùn)算,極大改善了傳統(tǒng)插補(bǔ)方式計(jì)算量繁多復(fù)雜、出錯(cuò)率較高的不足,這樣的神經(jīng)網(wǎng)絡(luò)數(shù)控系統(tǒng)插補(bǔ)器在工作的時(shí)候只需要對(duì)下一個(gè)插補(bǔ)點(diǎn)進(jìn)行插補(bǔ)運(yùn)算,也就是說(shuō)當(dāng)構(gòu)建好網(wǎng)絡(luò),在輸入端位置配置好前一個(gè)插補(bǔ)點(diǎn)的坐標(biāo)值,就能夠在輸出端得到下一個(gè)插補(bǔ)點(diǎn)的坐標(biāo)值,以及下一個(gè)插補(bǔ)點(diǎn)兩軸所對(duì)應(yīng)的運(yùn)動(dòng)速度等。最后把得到的數(shù)據(jù)傳輸?shù)娇刂葡到y(tǒng)里面,以便完成系統(tǒng)的自動(dòng)運(yùn)行。
6 結(jié)語(yǔ)
本文主要利用神經(jīng)網(wǎng)絡(luò)插補(bǔ)模型對(duì)自由曲線以及未知表達(dá)式曲線進(jìn)行插補(bǔ),在這一過(guò)程中,只需根據(jù)自由曲線中的部分型值點(diǎn)就可以完成此操作,而且不需要其他的數(shù)學(xué)計(jì)算過(guò)程。此種算法原理簡(jiǎn)單、計(jì)算量較小,并且插補(bǔ)精度也相比于傳統(tǒng)的插補(bǔ)方式高出許多,插補(bǔ)速度也得到了極大的提升。
因此,我們利用神經(jīng)網(wǎng)絡(luò)插補(bǔ)器來(lái)對(duì)未知曲線表達(dá)式進(jìn)行插補(bǔ)加工,這樣極大提高了插補(bǔ)的速度以及準(zhǔn)確率,同時(shí)也減輕了計(jì)算負(fù)擔(dān)。此外,如果想要進(jìn)一步的提升神經(jīng)網(wǎng)絡(luò)的逼近水平,減少加工的誤差,可以對(duì)相關(guān)的學(xué)習(xí)算法進(jìn)行優(yōu)化與改進(jìn)。
[1]鄔再新,李華兵.神經(jīng)網(wǎng)絡(luò)在自由曲線插補(bǔ)中的應(yīng)用研究[J].組合機(jī)床與自動(dòng)化加工技術(shù),2019(2):49-52.
[2]李華兵.神經(jīng)網(wǎng)絡(luò)在自由曲線插補(bǔ)中的應(yīng)用研究[D].甘肅:蘭州理工大學(xué),2019.
[3]劉少貞.基于RBF神經(jīng)網(wǎng)絡(luò)的四軸機(jī)器臂軌跡規(guī)劃研究[D].陜西:西安工業(yè)大學(xué),2016.
[4]夏炎.多關(guān)節(jié)機(jī)械臂軌跡規(guī)劃和軌跡跟蹤控制研究[D].黑龍江:哈爾濱工業(yè)大學(xué),2017.
[5]徐扣.六自由度機(jī)械臂的逆運(yùn)動(dòng)學(xué)求解與軌跡規(guī)劃研究[D].廣東:廣東工業(yè)大學(xué),2016.
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年11期)2021-12-06 05:38:48
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2020年6期)2020-07-25 02:31:36
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級(jí))(2018年9期)2018-09-26 05:59:44
瘋狂英語(yǔ)·新讀寫(2018年2期)2018-09-07 09:32:10
數(shù)學(xué)小靈通·3-4年級(jí)(2017年6期)2017-06-22 11:28:50
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19