反艦雷達導引頭抗拖引干擾技術研究
2020-10-13 10:48:14磨國瑞
火控雷達技術 2020年3期
關鍵詞:系統
杜 勇 解 禹 磨國瑞
(1.西安電子工程研究所 西安 710100 2.中國北方工業有限公司 北京 100053)
0 引言
作為現代海戰的主要進攻武器,反艦導彈能對海上各類高價值目標進行有效打擊,實戰表明,反艦導彈是一種高效費比的進攻武器,是決定海上作戰成敗的關鍵武器系統之一。
雷達導引頭以其“打了不管”以及全天候、全天時優勢,已在多款反艦導彈上得到實戰應用。而現代電子技術的進步,衍生的針對雷達的干擾手段也日趨完備,雷達導引頭所面臨的電磁環境也日趨惡劣。尤其是在反艦作戰中,艦上有較大的空間布置大量的電子戰設備,更容易集成部署并同時釋放多種類干擾樣式,這也對導引頭的抗干擾能力提出了更高的要求。
本文結合反艦雷達導引頭的工作流程,針對末制導階段導引頭所面臨的欺騙式拖引干擾開展分析,設計開發了抗干擾算法,并在某導引頭原理樣機上,借用干擾設備進行了干擾對抗試驗,試驗驗證了算法的有效性。
1 基于DRFM技術的欺騙干擾產生機理[1-2]
雷達有源欺騙干擾,主要是采用假目標作用于雷達系統,使系統不能獲取正確的目標參數信息,達到迷惑和擾亂雷達檢測、跟蹤目標的目的。干擾機主要采用存儲轉發(DRFM)架構,干擾信號的產生主要依賴于偵查引導系統截獲的雷達信號,通過對雷達信號進行幅度、時延或頻率調制形成假目標,使雷達跟蹤系統偏離真實目標而達到干擾的效果。轉發的干擾信號與真實目標回波信號在時域、頻域上具有高度的相似性。
圖1為單通道DRFM干擾機的一般組成框圖,包括上、下變頻模塊、模數轉換、數模轉換器、本振、控制單元和功放電路等模塊。DRFM工程實現形式主要有單通道、IQ雙通道和信道化三種方案,具體實現形式根據需求來確定,本文就不展開敘述。
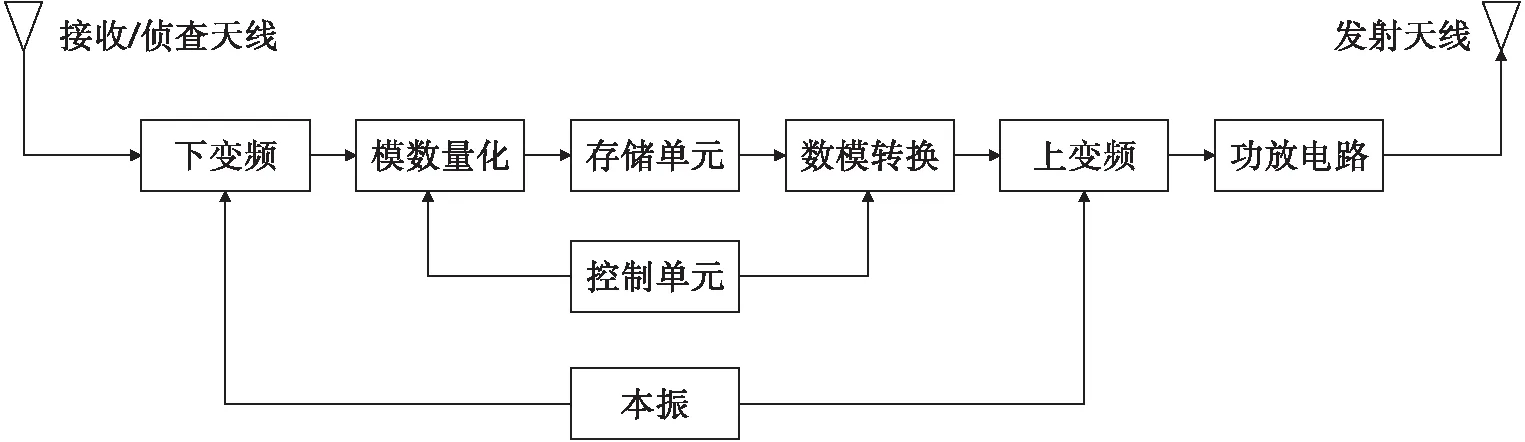
圖1 單通道DRFM干擾機組成框圖
2 欺騙式干擾過程分析[3]
目前常用的欺騙干擾方式有距離拖引、速度拖引、距離速度同步拖引,干擾信號一般按照停拖期、拖引期、保持期、關閉期四個階段周期釋放,對雷達系統實施循環不間斷干擾。四個階段拖引算法原理為
(1)
其中,Tf為假目標,T為實際目標,Vf為拖引速度或距離,Vfmax為最大拖引速度或距離,t1為起始時間,t2為拖引時間,t3為保持時間,t4為關閉時間。
干擾機在各階段,執行各不相同的任務。在停拖期,干擾機捕獲并解譯雷達發射信號,對信號幅度進行調制后直接轉發;拖引期則是根據拖引類型,對信號進行距離、速度及幅度調制,使干擾信號與目標回波逐漸分離達到干擾的目的;保持期則是在干擾信號達到系統設定的最大拖引參數時,干擾信號持續發送一段時間;關閉器則是干擾機停止工作,完成本周期的干擾。

圖2 欺騙式拖引干擾工作過程
3 抗干擾策略分析與設計
從欺騙式拖引干擾的工作機理不難看出,雷達導引頭必須在“拖引期”準確識別出干擾類型,在進入“保持期”之前采取相應的抗干擾措施,才能有效應對欺騙干擾。結合雷達導引頭實際的工作流程,整個抗干擾過程可分為干擾識別和抗干擾跟蹤兩個階段。
3.1 干擾識別
拖引速度的快慢,將直接影響干擾的效果。拖引速度過慢,真假目標始終在同一跟蹤波門內,假目標消失后,導引頭依然能檢測并跟蹤目標,達不到干擾的目的。拖引速度過快,干擾效果明顯,但也為識別干擾類型提供了線索。
綜合考慮海面艦船目標的運動特性、機動特性,通過監測導彈飛行速度、雷達導引頭實時輸出的彈目距離及距離變化率、回波多普勒頻率等信息,可以準確判斷導引頭是否受到干擾。
1)通過比對彈目相對速度與彈體飛行速度,判定距離維是否受到拖引干擾。
彈目相對運動速度VT與彈體飛行速度VM之差,即為艦船機動速度。而受限于艦船特性及作戰使用情況,根據海面艦船的排水量,其最大運動速度Vmax是可以預期的。因此,當彈體飛行速度與彈目相對速度明顯或遠遠大于Vmax時,可判定距離維受到拖引干擾。
彈目相對運動速度可以通過對彈目距離進行濾波得到,而彈體飛行速度則可以利用彈上慣性導航系統的數據解算得到,當二者滿足式(2)關系時,可初步判定當前幀“目標”運動速度異常。
|VT-VM|>(1.2~1.5)×Vmax
(2)
為保證判定的可靠性,可連續進行多幀處理,采取N/M準則(即連續M幀數據,N幀異常)進行最終判定。
2)通過多普勒頻率的監測,判定速度維是否受到拖引干擾。
雷達導引頭末制導目標跟蹤階段,系統無法直接輸出目標多普勒頻率,而是通過運動目標檢測MTD,實時輸出能體現目標運動的多普勒通道號dpl。考慮艦船目標的機動特性(主要是加速能力),其速度變化量不可能在毫秒時間內發生較大變化。因此,可以通過對dpl的短時平滑監測,來判定速度維是否受到干擾。為保證判定的可靠性,可連續進行多幀處理,采取N/M準則(即連續M幀數據,N幀異常)進行最終判定。
根據上述判據,可以判定所受到的拖引干擾類型:若距離維異常,則可判定系統受到距離拖引干擾;若速度維監測異常,可判定為受到距離拖引干擾;若距離、速度維均異常,則可判定為受到距離-速度聯合拖引。
3.2 抗干擾策略設計
在受到干擾時,假目標通過欺騙跟蹤系統,快速移動后關停,導致跟蹤丟失,因此,抗干擾策略設計的核心在于如何調整波門移動方式,保證干擾信號關停后,跟蹤系統能再次捕獲真實目標。
無干擾跟蹤模式下,跟蹤波門按彈目距離進行實時調整,波門移動速度為彈目相對運動速度。但由于干擾釋放的不確定性,以及干擾識別的滯后性,抗干擾策略啟動時,系統實質上已受到干擾,所測量獲取的彈目距離、彈目相對運動速度實際是彈體相對干擾假目標的距離、速度。因此,退而求其次,跟蹤波門可以按導彈飛行速度進行調整,以保證波門移動速度小于干擾移動速度。另外,考慮到艦船機動的不確定性,在設計抗干擾跟蹤流程時,跟蹤波門較正常跟蹤時的波門,可以適當放大。
如圖3所示,本文設計了以“按彈速遞推跟蹤波門”為核心的抗干擾策略。
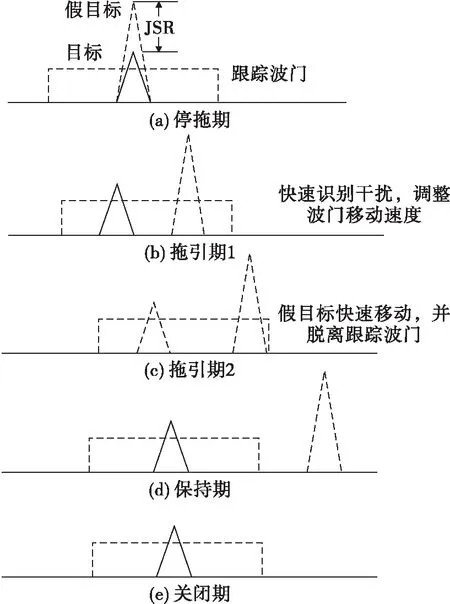
圖3 抗干擾算法示意圖
如圖3(a)在停拖期,干擾機釋放假目標,并與真實目標回波在時域、頻域高度重合,雷達跟蹤系統在此時跟蹤目標由真實目標切換至干擾假目標。
如圖3(b)在拖引期1,雷達導引頭在快速識別干擾,調整跟蹤波門按彈體飛行速度進行遞推,短時間內,跟蹤系統跟蹤的目標依然為干擾假目標。
如圖3(c)在拖引期2,干擾假目標快速移動,而跟蹤波門按導彈飛行速度進行遞推,遞推速度遠低于假目標運動速度,假目標信號會迅速脫離波門。假目標脫離波門后,跟蹤系統在波門內重新進行目標匹配,重新捕獲真實目標。在短暫的干擾識別后,跟蹤系統轉換為正常跟蹤,波門彈目相對運動速度進行遞推調整。
如圖3(d)、圖3(e)在保持期、關閉期,雷達導引頭處于正常跟蹤狀態,干擾信號處于跟蹤波門之外,無法起到干擾效果。
根據上述分析,本文設計如下策略,來應對欺騙式拖引干擾對雷達導引頭工作的影響。
1)總體思路:末制導跟蹤全過程,實時監測系統關鍵參數(包括彈體飛行速度、彈目相對運動速度、目標多普勒通道等),按設定策略與門限快速識別出拖引干擾。欺騙式干擾釋放期間,雷達導引頭跟蹤波門按彈速遞推,假目標運動出波門后,恢復至正常跟蹤狀態,跟蹤波門按彈目距離進行遞推。
2)干擾判決:雷達彈目相對速度(彈目距離濾波得到)與彈體飛行速度之差超過設定閾值;雷達多普勒通道號在短時間內出現較大變化。
3)抗干擾設計:判定雷達受到欺騙干擾后,改變距離波門調整方式,由原來的按跟蹤目標進行調整,更改為按彈目速度進行調整,以期讓假目標快速脫離檢測波門,通過記憶跟蹤再次檢測真實目標;干擾消失后,恢復按跟蹤目標信息進行波門調整。
4 試驗驗證
按照前文分析及所設計的抗欺騙干擾策略,作者利用某雷達導引頭,使用干擾模擬設備開展了相關的驗證試驗。干擾模擬設備采用雙通道分別模擬目標回波和欺騙干擾,并在末端通過功率合成方式,射頻輻射輸出。
如圖4所示,不采取任何抗干擾措施,目標從30 km處以200 m/s速度運動,模擬器周期性釋放距離拖引欺騙干擾,目標跟蹤會周期性丟失。
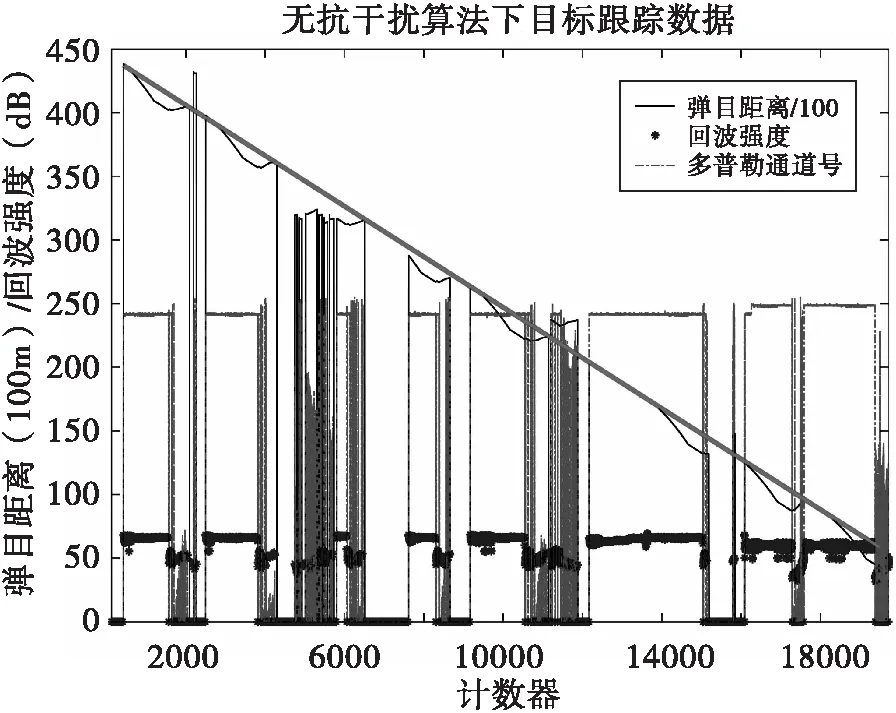
圖4 距離拖引干擾下動目標跟蹤曲線(無抗干擾算法)
如圖5所示,目標從30 km開始以200 m/s速度運動,模擬器周期性釋放距離拖引干擾,拖引方式為線性后拖,停拖期、拖引期、保持期、關閉期時間分配分別為2 s、6 s、2 s、2 s,拖引距離為0.6 km,等效相對拖引速度為100 m/s。
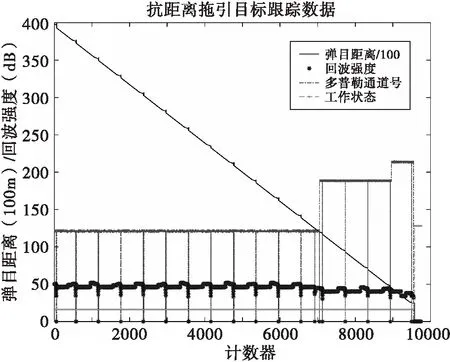
圖5 距離拖引干擾下運動目標跟蹤曲線(加抗干擾算法)
如圖6所示,目標從40 km開始以200 m/s速度運動,模擬器周期性釋放距離-速度聯合拖引干擾,拖引方式為線性后拖,停拖期、拖引期、保持期、關閉期時間分配分別為2 s、10 s、2 s、2 s,拖引距離為1.5 km,等效相對拖引速度為150 m/s。
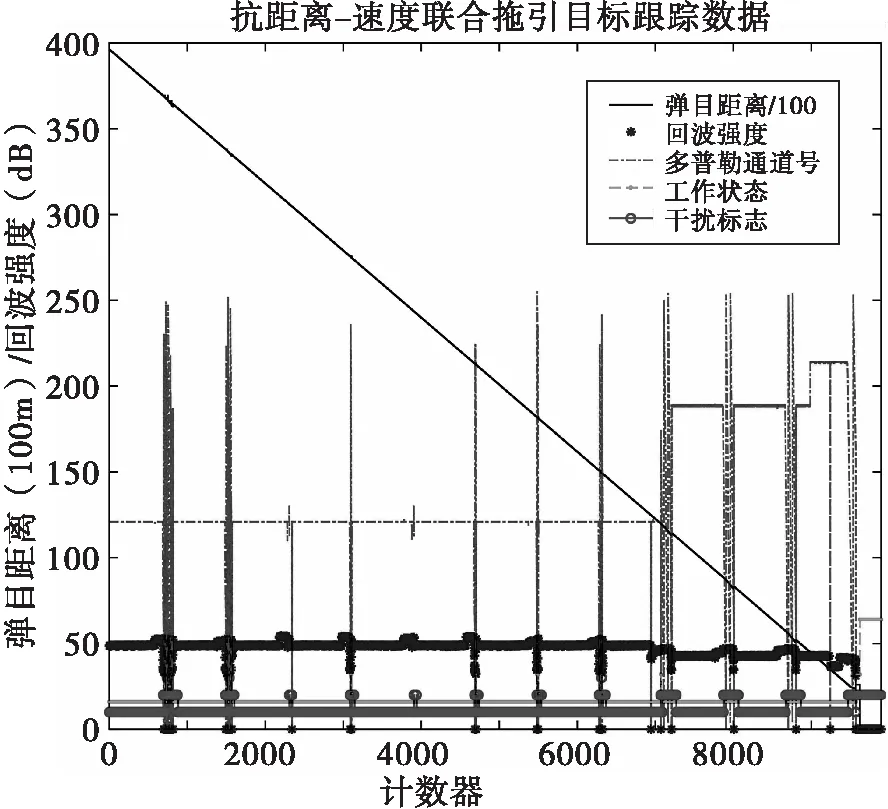
圖6 距離-速度聯合拖引干擾下運動目標跟蹤曲線(加抗干擾算法)
采取抗干擾措施后,整個過程中雷達導引頭未出現跟蹤丟失現象,且工作狀態的切換符合預期設計。
從距離跟蹤曲線看,干擾釋放后,會出現短時被拖引現象,在這段時間內,雷達導引頭根據系統各項參數變化,準確識別出干擾,進而啟用抗干擾算法,避免一直跟蹤假目標。而當假目標運動出檢測波門后,雷達導引頭能迅速重新捕獲真實目標。另外,由以上各圖跟蹤目標幅度變化,也可以推算出干擾機釋放干擾和目標的干信比。
5 結束語
電子戰領域,干擾與抗干擾是一對永恒的矛盾,在資源充足的前提下,沒有對抗不了的干擾。本文所提出的抗干擾算法,主要針對反艦雷達導引頭末制導跟蹤階段,利用彈體飛行速度進行波門遞推,通過記憶跟蹤模式進行目標二次捕獲,該算法能一定程度上對抗欺騙式拖引干擾,保證目標跟蹤的穩定性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
