汽車發(fā)動(dòng)機(jī)艙軟管干涉試驗(yàn)用六自由度可調(diào)式夾具設(shè)計(jì)及仿真
2020-10-10 01:02:42劉勁松徐澤宇
制造業(yè)自動(dòng)化 2020年9期
柳 偉,錢 郁,劉勁松,徐澤宇
(1.上汽大眾汽車有限公司,上海 201804;2.同濟(jì)大學(xué) 機(jī)械與能源工程學(xué)院,上海 201804)
0 引言
當(dāng)前汽車發(fā)動(dòng)機(jī)艙管路和線束(管束)填充密度越來越大,管路和線束的空間形態(tài)變得越來越復(fù)雜,占用空間越來越多,需要合理選擇管路走向及固定位置和方式[1]。如果預(yù)留的布線空間過大會(huì)造成內(nèi)部空間浪費(fèi),過小則會(huì)產(chǎn)生軟管干涉,從而加速軟管磨損。孫鵬洋就變速箱附近布置管線困難的問題,設(shè)計(jì)了一種變速箱管線固定支架避免了管線間的干涉[2]。胡光輝設(shè)計(jì)了一種進(jìn)氣導(dǎo)流管裝置,解決了進(jìn)氣管道在發(fā)動(dòng)機(jī)艙布置空間與性能要求上的矛盾[3]。李哲寧總結(jié)了汽車線束開發(fā)在整車開發(fā)中的要求,其中對不同的管路間隙有明確的規(guī)定[4]。可以看出汽車發(fā)動(dòng)機(jī)艙軟管的干涉問題是汽車設(shè)計(jì)階段必須考慮的問題,在汽車發(fā)動(dòng)機(jī)艙設(shè)計(jì)階段通過實(shí)驗(yàn)獲得汽車發(fā)動(dòng)機(jī)艙的空間利用情況以及管路線束之間的干涉情況十分重要。
為了模擬汽車運(yùn)動(dòng)狀態(tài)下軟管的振動(dòng)從而判斷軟管之間干涉情況,需要控制發(fā)動(dòng)機(jī)總成實(shí)現(xiàn)六自由度運(yùn)動(dòng)以真實(shí)模擬軟管狀態(tài)。目前,在汽車發(fā)動(dòng)機(jī)前艙內(nèi)控制發(fā)動(dòng)機(jī)總成實(shí)現(xiàn)六自由度運(yùn)動(dòng)的設(shè)計(jì)方案中,某主機(jī)廠采用了六自由度工業(yè)機(jī)器人夾持動(dòng)力總成進(jìn)行空間位姿調(diào)整的方案來實(shí)現(xiàn)發(fā)動(dòng)機(jī)總成運(yùn)動(dòng)狀態(tài)的改變,進(jìn)而模擬出管路線束的位姿。但是使用上述六自由度機(jī)器人及其配套硬件的方案存在占地面積大、高成本和精度不高的缺點(diǎn)。為了克服以上缺點(diǎn),設(shè)計(jì)了一種汽車發(fā)動(dòng)機(jī)艙軟管干涉試驗(yàn)用六自由度可調(diào)夾具。在實(shí)驗(yàn)中該夾具能夠夾持動(dòng)力總成及擋板,通過對發(fā)動(dòng)機(jī)總成進(jìn)行空間六個(gè)自由度的位置調(diào)整來模擬車輛行駛中發(fā)動(dòng)機(jī)總成運(yùn)動(dòng)狀態(tài),承載載荷大,精度和可靠性高。同時(shí),該夾具還可以通過改變發(fā)動(dòng)機(jī)總成的定位與夾緊位置來夾持不同型號(hào)的發(fā)動(dòng)機(jī)總成進(jìn)行發(fā)動(dòng)機(jī)艙軟管干涉實(shí)驗(yàn)。
1 六自由度可調(diào)式夾具設(shè)計(jì)
1.1 六自由度可調(diào)式夾具總體設(shè)計(jì)
發(fā)動(dòng)機(jī)總成質(zhì)量較大且形狀復(fù)雜,為使得發(fā)動(dòng)機(jī)總成定位準(zhǔn)確與夾緊可靠,設(shè)計(jì)發(fā)動(dòng)機(jī)總成固支機(jī)構(gòu)來滿足裝夾要求;靜態(tài)條件下發(fā)動(dòng)機(jī)艙軟管間距離的測量數(shù)據(jù)表明單次直線運(yùn)動(dòng)精度需滿足0.5mm且繞X、Y、Z軸旋轉(zhuǎn)需滿足最小調(diào)節(jié)角度為1°,根據(jù)發(fā)動(dòng)機(jī)總成特點(diǎn),采用組合式運(yùn)動(dòng)機(jī)構(gòu)實(shí)現(xiàn)發(fā)動(dòng)機(jī)總成六自由度的運(yùn)動(dòng)要求;汽車發(fā)動(dòng)機(jī)艙由四周擋板構(gòu)成外部輪廓,其分別為前端模塊、左(右)縱梁和防火墻,如圖1所示。在運(yùn)動(dòng)過程中,需通過輔助機(jī)構(gòu)支撐四周擋板來真實(shí)模擬發(fā)動(dòng)機(jī)總成在發(fā)動(dòng)機(jī)艙的相對位置情況并為后續(xù)軟管干涉檢測提供參考位置。綜上,該六自由度可調(diào)式夾具由發(fā)動(dòng)機(jī)總成固支機(jī)構(gòu)、運(yùn)動(dòng)機(jī)構(gòu)與輔助機(jī)構(gòu)三部分組成,設(shè)計(jì)方案為:
1)在固支機(jī)構(gòu)設(shè)計(jì)方面,利用發(fā)動(dòng)機(jī)總成現(xiàn)有特征孔,采用三點(diǎn)定位與螺紋夾緊方式裝夾發(fā)動(dòng)機(jī)總成。
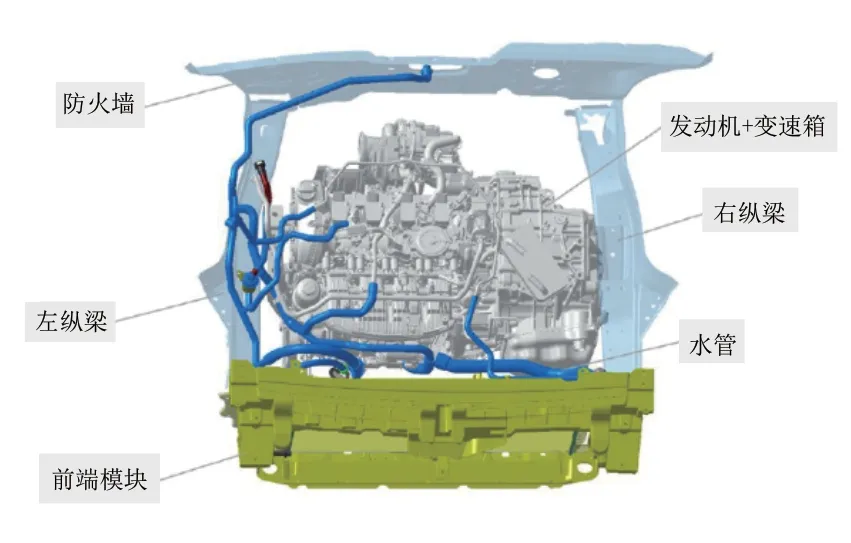
圖1 汽車發(fā)動(dòng)機(jī)艙主要部件圖
2)在運(yùn)動(dòng)機(jī)構(gòu)設(shè)計(jì)方面,采用滾珠絲杠驅(qū)動(dòng)滑塊運(yùn)動(dòng)從而帶動(dòng)發(fā)動(dòng)機(jī)固支架移動(dòng)的工作臺(tái)方式實(shí)現(xiàn)在笛卡爾坐標(biāo)系下總成沿X、Y軸方向的移動(dòng),如圖2所示。試驗(yàn)所用發(fā)動(dòng)機(jī)總成質(zhì)量約為150kg,需要設(shè)計(jì)承載能力較大的動(dòng)力源來實(shí)現(xiàn)沿Z向移動(dòng),故選用千斤頂作為動(dòng)力源,并輔以微調(diào)機(jī)構(gòu)進(jìn)行沿Z軸方向的定位。由于球鉸機(jī)構(gòu)在角度調(diào)節(jié)方面調(diào)節(jié)靈活且承載能力大,故采用在發(fā)動(dòng)機(jī)固支架底板中心設(shè)置球鉸機(jī)構(gòu)的方式實(shí)現(xiàn)轉(zhuǎn)動(dòng)自由度調(diào)節(jié),并通過在固支架底板四周設(shè)置微調(diào)機(jī)構(gòu)實(shí)現(xiàn)定位。
3)在輔助機(jī)構(gòu)設(shè)計(jì)方面,為了節(jié)約實(shí)驗(yàn)空間并充分利用擋板多孔的結(jié)構(gòu)特點(diǎn),選用擋板上的部分特征孔作為定位夾緊孔,采用支撐臂形式來定位與支撐四塊四周擋板。
本文將詳細(xì)介紹以上三部分結(jié)構(gòu)的具體設(shè)計(jì)。
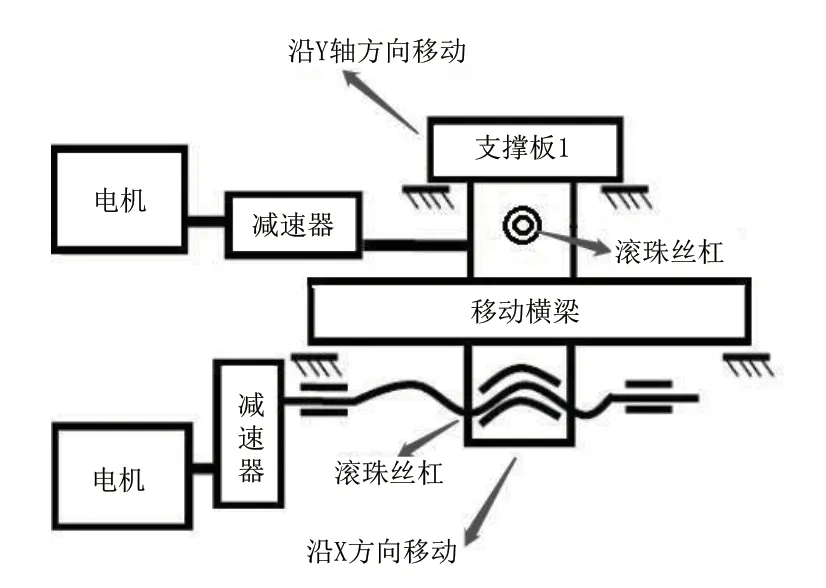
圖2 沿X、Y軸方向移動(dòng)調(diào)節(jié)原理圖
1.2 發(fā)動(dòng)機(jī)總成固支架設(shè)計(jì)
為了保證發(fā)動(dòng)機(jī)總成在固支架上的裝夾穩(wěn)定性,利用六自由度定位原理,選擇汽車發(fā)動(dòng)機(jī)總成上三個(gè)特征孔作為定位孔,并選擇發(fā)動(dòng)機(jī)總成底部現(xiàn)有的兩個(gè)與車身連接的螺紋孔作為夾緊孔。在笛卡爾坐標(biāo)系下,利用輔助定位臂1、輔助定位臂2和輔助定位臂3頂部的圓柱銷與小環(huán)面構(gòu)成三點(diǎn)支撐方式來定位發(fā)動(dòng)機(jī)總成。三根輔助定位臂底座長槽孔可通過螺栓與固支架底板上長槽進(jìn)行連接,并可通過微調(diào)以實(shí)現(xiàn)不同型號(hào)發(fā)動(dòng)機(jī)的定位,如圖3所示。限位夾緊機(jī)構(gòu)選擇螺紋夾緊機(jī)構(gòu),如圖4所示,利用螺栓將發(fā)動(dòng)機(jī)總成底部兩個(gè)螺紋孔與夾具上兩限位夾緊塊固定在發(fā)動(dòng)機(jī)總成固支架底板上。
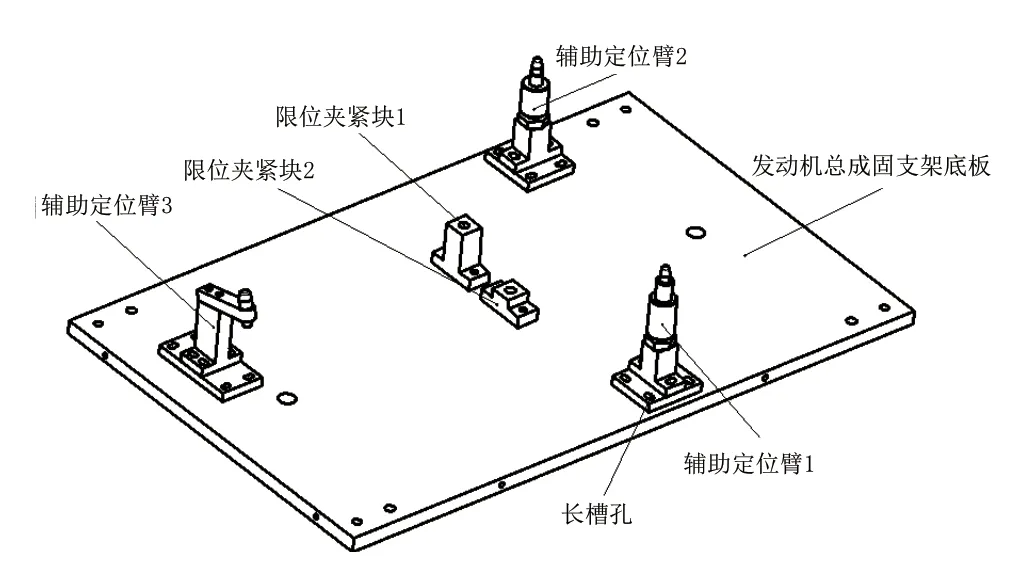
圖3 發(fā)動(dòng)機(jī)總成固支架結(jié)構(gòu)示意圖

圖4 夾緊機(jī)構(gòu)示意圖
1.3 六自由度可調(diào)機(jī)構(gòu)設(shè)計(jì)
在車輛運(yùn)行過程中,由于發(fā)動(dòng)機(jī)總成與外部環(huán)境對整車都存在著振動(dòng)激勵(lì),使得汽車發(fā)動(dòng)機(jī)總成帶動(dòng)與之相連的軟管系產(chǎn)生振動(dòng)干涉[5]。為了得到汽車發(fā)動(dòng)機(jī)艙軟管的干涉情況,設(shè)計(jì)了一套通過模擬發(fā)動(dòng)機(jī)總成在車輛運(yùn)行中的多個(gè)時(shí)刻的空間姿態(tài),完成6個(gè)方向自由度運(yùn)動(dòng)的可調(diào)機(jī)構(gòu),其具體實(shí)現(xiàn)方式如下:1)沿X、Y軸方向的移動(dòng)調(diào)節(jié):通過電機(jī)旋轉(zhuǎn)帶動(dòng)絲杠螺母機(jī)構(gòu)運(yùn)動(dòng),滑塊在滑軌導(dǎo)向作用下上沿X、Y軸方向移動(dòng)實(shí)現(xiàn)發(fā)動(dòng)機(jī)總成的沿X、Y軸方向的移動(dòng),如圖5所示。2)沿Z軸方向的移動(dòng)調(diào)節(jié):安裝于底板下的千斤頂抬升裝置往上可推動(dòng)支撐板2,將Z軸方向移動(dòng)傳遞給上方;4個(gè)導(dǎo)向柱限制移動(dòng)方向;4個(gè)微調(diào)螺栓可以實(shí)現(xiàn)Z向移動(dòng)的微調(diào),如圖6所示。3)繞X軸、Y軸、Z軸方向的旋轉(zhuǎn)調(diào)節(jié):安裝于固支架底板和支撐板1之間的球鉸結(jié)構(gòu)可以滿足固支架底板3個(gè)方向的旋轉(zhuǎn)自由度運(yùn)動(dòng);使用固支架底板上四個(gè)調(diào)節(jié)螺柱進(jìn)行繞X軸的角度限位和繞Y軸的角度調(diào)整;2個(gè)壓緊塊與固支架底板側(cè)面存在1cm間隙,通過使用壓緊塊上的旋緊螺釘進(jìn)行繞Z軸的旋轉(zhuǎn)微調(diào)與固定,如圖5、圖6所示。
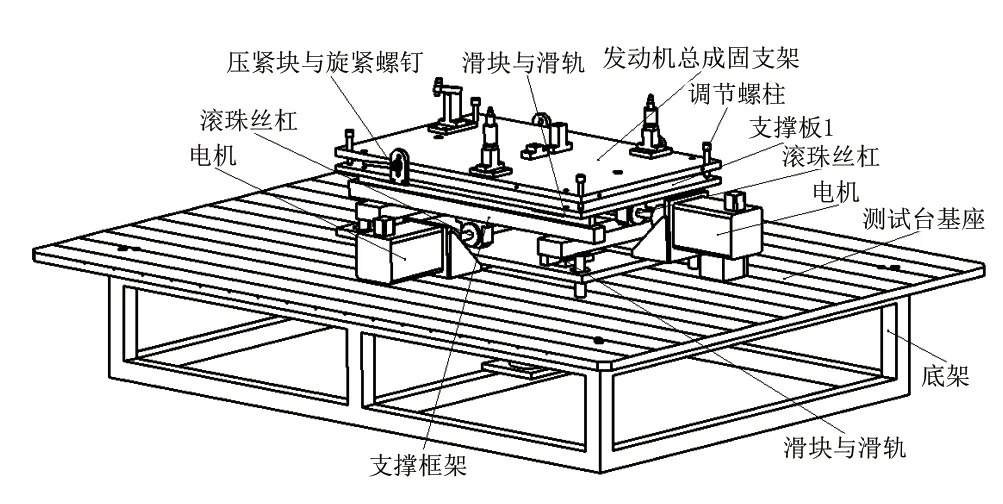
圖5 六自由度可調(diào)機(jī)構(gòu)示意圖a
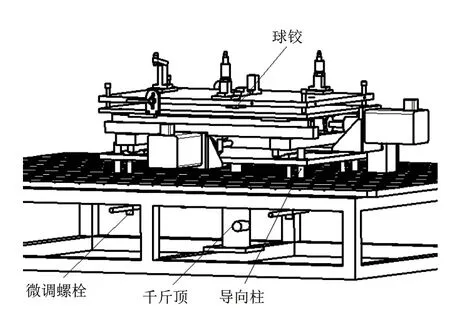
圖6 六自由度可調(diào)機(jī)構(gòu)示意圖
1.4 汽車發(fā)動(dòng)機(jī)艙擋板定位臂設(shè)計(jì)
為了利用擋板實(shí)現(xiàn)在夾具臺(tái)上精確定位發(fā)動(dòng)機(jī)總成在實(shí)際發(fā)動(dòng)機(jī)艙中的空間位置,需要設(shè)計(jì)支撐四塊四周擋板的定位支撐臂。夾具通過前端模塊定位臂、左(右)縱梁定位臂和防火墻定位臂來實(shí)現(xiàn)擋板的定位與固定,如圖7所示。前端模塊定位臂由磁力座、支撐立柱、前端模塊固夾片組成,并通過前端模塊固夾片的三個(gè)定位夾緊孔與前端模塊進(jìn)行固接,其通過改變固夾片的位置與角度來調(diào)節(jié)平動(dòng)與轉(zhuǎn)動(dòng)自由度。左(右)縱梁定位臂由前端固夾片、后端固夾塊、支撐立柱、磁力座組成,其通過前端固夾片的兩個(gè)定位夾緊孔與后端固夾塊的定位夾緊孔與左右縱梁進(jìn)行固接,通過改變固夾片和固夾塊的位置與角度來調(diào)節(jié)平動(dòng)與轉(zhuǎn)動(dòng)自由度。防火墻定位臂由磁力座、支撐立柱、固夾柱組成,其通過定位夾緊孔與防火墻進(jìn)行固接,也可通過改變固夾柱的位置與角度來調(diào)節(jié)平動(dòng)與轉(zhuǎn)動(dòng)自由度。
2 六自由度可調(diào)式夾具關(guān)鍵零部件強(qiáng)度仿真
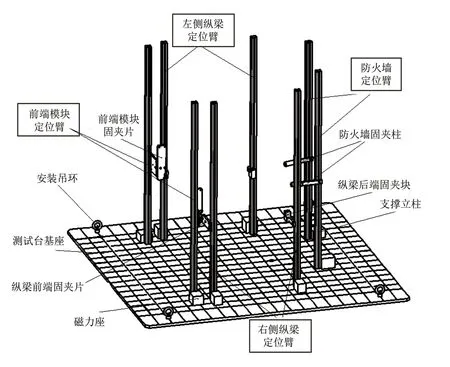
圖7 汽車發(fā)動(dòng)機(jī)艙擋板定位臂結(jié)構(gòu)示意圖
在六自由度可調(diào)式夾具設(shè)計(jì)中,需要對部分關(guān)鍵的機(jī)械零部件進(jìn)行強(qiáng)度分析,本文采用ANSYS Workbench模塊對夾具的關(guān)鍵零部件進(jìn)行有限元仿真分析。在六自由度可調(diào)式夾具的運(yùn)動(dòng)過程中,主要受力元件是三個(gè)發(fā)動(dòng)機(jī)總成輔助定位臂、擋板固支架、球鉸鏈機(jī)構(gòu)、支撐板和千斤頂。其中球鉸鏈機(jī)構(gòu)可通過選擇高強(qiáng)度球鉸鏈標(biāo)準(zhǔn)件滿足強(qiáng)度要求;三塊支撐板可根據(jù)受力選擇高強(qiáng)度鋁合金板滿足強(qiáng)度要求;千斤頂根據(jù)運(yùn)動(dòng)及承重確定并外購;而三個(gè)發(fā)動(dòng)機(jī)總成輔助定位臂、擋板固支架需要自行設(shè)計(jì),故在設(shè)計(jì)過程中需要對其進(jìn)行有限元分析來校核強(qiáng)度要求。本文利用ANSYS Workbench進(jìn)行發(fā)動(dòng)機(jī)總成輔助定位臂與擋板固支架的有限元分析。
2.1 發(fā)動(dòng)機(jī)總成輔助定位臂在ANSYS Workbench 中的受力分析
1)發(fā)動(dòng)機(jī)總成輔助定位臂受力分析。通過對發(fā)動(dòng)機(jī)總成夾具模型分析,選取A、B、C三處進(jìn)行靜載荷計(jì)算,如圖8所示。發(fā)動(dòng)機(jī)質(zhì)量在考慮安全系數(shù)的前提下設(shè)定為200kg,根據(jù)發(fā)動(dòng)機(jī)總成支撐點(diǎn)的空間關(guān)系進(jìn)行A、B和C三處載荷計(jì)算,可得A、B和C三處載荷分別為682N、573N、244N。

圖8 發(fā)動(dòng)機(jī)總成輔助定位臂受力處示意圖
2)基于ANSYS Workbench的發(fā)動(dòng)機(jī)總成輔助定位臂仿真[6,7]。利用Catia建立三維模型并導(dǎo)入到ANSYS Workbench中;添加材料與屬性,在夾具的裝配體中為每一個(gè)零件添加材料屬性,將Workbench材料庫中的材料Structural Steel、Aluminum Alloy添加到當(dāng)前項(xiàng)目中,同時(shí)修改材料的屬性與楊氏模量;網(wǎng)格劃分,默認(rèn)選擇智能劃分;添加約束,選取夾具底座底面添加約束,約束屬性fixed support;添加載荷,選取輔助支撐臂上小圓環(huán)面為受力面,并添加載荷與載荷方向。在A、B、C三處分別施加682N、573N、244N的載荷,A支柱的受力面積為內(nèi)徑16mm,外徑為最上層支撐面半徑的圓環(huán)面,B、C支柱的受力面積為內(nèi)徑12mm,外徑為最上層支撐面半徑的圓環(huán)面,固定約束面為法蘭盤接觸面;求解并查看結(jié)果,得到輔助支撐臂的等效應(yīng)力、應(yīng)變分布圖和總體變形分布圖如圖9~圖11所示。
圖9 發(fā)動(dòng)機(jī)總成輔助定位臂等效應(yīng)力分布圖
圖10 發(fā)動(dòng)機(jī)總成輔助定位臂等效應(yīng)變分布圖

圖11 發(fā)動(dòng)機(jī)總成輔助定位臂總體變形分布圖
由圖9與圖10可以看出,發(fā)動(dòng)機(jī)總成輔助定位臂等效應(yīng)力的最大值在A支柱上,大小約為39.0MPa,小于Q235抗壓強(qiáng)度,處于安全范圍之內(nèi);等效應(yīng)變結(jié)果表明,最大應(yīng)變在A支柱上,約為0.0601%,等效應(yīng)變在可接受范圍之內(nèi)。
總體變形結(jié)果如圖11所示,總體變形結(jié)果表明最大變形在A支柱上,約為0.209mm,變形在可接受范圍之內(nèi)。
綜上,通過分析了定位臂應(yīng)力、應(yīng)變與變形情況,驗(yàn)證了發(fā)動(dòng)機(jī)總成輔助定位臂的可靠性。
2.2 擋板固支架在ANSYS Workbench中的受力分析
前端模塊約10kg~20kg,左右側(cè)梁約50kg,后擋板約10kg~20kg,為保證仿真結(jié)果的有效性,對應(yīng)擋板質(zhì)量均取估重最大值,并設(shè)置1.5的安全系數(shù),即前端模塊質(zhì)量為30kg,左右側(cè)梁質(zhì)量為75kg,后擋板質(zhì)量為30kg,因各擋板質(zhì)心位置未知,因此將各受力均勻分布到各固接位置,進(jìn)行受力分析。固定約束為平臺(tái)底板,網(wǎng)格劃分默認(rèn)選擇智能劃分,所有部件材料均設(shè)置為鋁。按照以上設(shè)置,分別進(jìn)行應(yīng)力、應(yīng)變和總體變形分析,結(jié)果如圖12~圖14所示。

圖12 擋板定位臂等效應(yīng)力分布圖
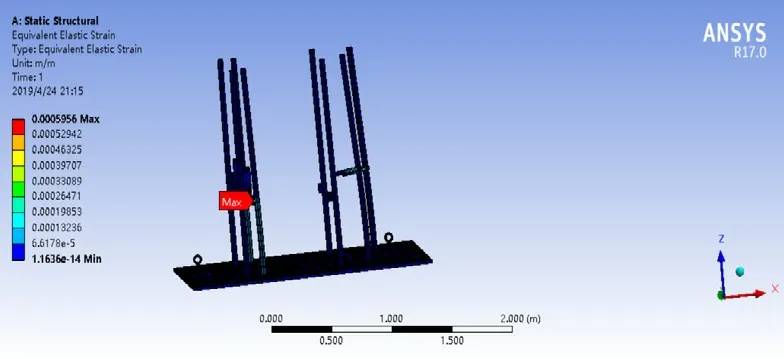
圖13 擋板定位臂等效應(yīng)變分布圖
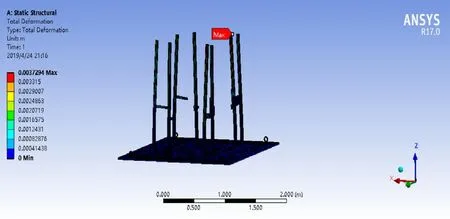
圖14 擋板定位臂總體變形分布圖
由圖12與圖13可以看出,擋板定位臂等效應(yīng)力的最大值位于左右縱梁擋板定位臂上,約為41.7MPa,小于常見的鋁合金材料抗拉強(qiáng)度的167MPa,處于安全范圍之內(nèi);等效應(yīng)變結(jié)果表明,最大應(yīng)變位于左右縱梁擋板定位臂上,約為0.0601%,等效應(yīng)變在可接受范圍之內(nèi)。
總體變形結(jié)果如圖14所示,總體變形結(jié)果表明,最大變形位于左右側(cè)梁擋板定位臂上,約3.3mm,由于此變形位于長梁頂部,而實(shí)際工作位置遠(yuǎn)低于該位置,故變形在可接受范圍之內(nèi)。
綜上,發(fā)動(dòng)機(jī)總成輔助定位臂與擋板定位臂的設(shè)計(jì)均滿足設(shè)計(jì)要求。
3 結(jié)語
本文針對汽車發(fā)動(dòng)機(jī)艙軟管干涉試驗(yàn),設(shè)計(jì)了一套能實(shí)現(xiàn)六自由度調(diào)整以滿足模擬發(fā)動(dòng)機(jī)艙振動(dòng)姿態(tài)要求的夾具。根據(jù)汽車發(fā)動(dòng)機(jī)總成運(yùn)動(dòng)需求,進(jìn)行了夾具的結(jié)構(gòu)設(shè)計(jì)與三維建模;就關(guān)鍵零部件的強(qiáng)度校驗(yàn)問題,利用ANSYS Workbench有限元分析軟件對發(fā)動(dòng)機(jī)總成輔助定位臂和擋板定位臂進(jìn)行了強(qiáng)度、剛度分析,仿真結(jié)果驗(yàn)證了結(jié)構(gòu)設(shè)計(jì)的合理性,提高了項(xiàng)目開展效率,降低了可調(diào)式夾具的開發(fā)成本,為后期夾具的結(jié)構(gòu)優(yōu)化提供了重要理論支撐。
猜你喜歡
保健醫(yī)苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學(xué))(2021年8期)2021-11-20 06:08:04
中華詩詞(2020年1期)2020-09-21 09:24:52
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
模具制造(2019年3期)2019-06-06 02:10:54
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
汽車與新動(dòng)力(2015年1期)2015-02-27 12:11:01
航天器工程(2014年5期)2014-03-11 16:35:55
