基于物聯網的無人機輸電線路巡檢系統
2020-09-29 12:51:04張嘉烽張正華
無線電工程 2020年10期
關鍵詞:系統
沈 逸,張嘉烽,龔 正,張正華*
(1.揚州蘇水科技有限公司,江蘇 揚州 225000;2.揚州大學 信息工程學院,江蘇 揚州 225127;3.國網江蘇省電力有限公司 揚州供電公司,江蘇 揚州 225009)
0 引言
隨著輸配電技術的迅速發展,輸配電基建的日益普及,越來越多的高壓輸電線路故障問題也變得更加棘手,如絕緣子擊穿、電路老化、雷擊穿和垃圾纏繞等等[1],由于輸電線路輸送距離長、塔架高并可能穿越大量自然條件復雜多變的深山大河,甚至是無人區,當出現故障時,目前常見是大量采用人工地面觀察或登桿(塔)排查等傳統手段檢查輸電線路運行狀態[2],這不僅受自然條件制約,而且勞動強度大,人身安全存在隱患,成本高,巡檢效率低,巡檢質量難以保證以適應當前大電網安全生產的要求。
目前,國內外投入運營的輸電線路巡檢系統并不多。文獻[3]中討論了垂直起降無人機在電力設備巡檢中的應用,分析了近年來該課題的研究進展情況。文獻[4]討論了巡檢中的諸多關鍵技術問題,展示出輸電線巡檢系統良好的發展前景。文獻[5]介紹了一種檢測輸電線路的圖像監測與檢測系統,將直升機作為巡檢載體沿輸電線路飛行,拍攝其高清圖像,然后進行離線處理并診斷可能出現的線路故障。文獻[6]介紹了電力無人巡檢系統的關鍵部分飛行控制器,種類繁多,應用廣泛。文獻[7]中有不少國外愛好者發起無人載具控制器開源項目,例如PIXHAWK、APM、CC3D、MutilWii等,這些開源無人載具控制器都可以控制包括多旋翼飛行器在內的多種無人載具。
針對以上研究不足,設計了一種以無人多旋翼飛行器為巡檢載體、地面監控設備為支撐的輸電線路巡檢系統。這種巡線模式比起上述人工檢測方法,具有低成本、低風險、高可靠、高效率和高靈活的優勢,同時,其運用航拍影像的圖像處理與識別技術[8],為輸電線路缺陷故障的快速智能診斷提供了理論支持。通過高清視頻無線傳輸技術[9],在電力綜合探傷系統中實現數據鏈[10]的效果。在探測過程中采用一種可靠電力巡線地面站支撐系統,并實現電力巡線地面站支撐系統與多旋翼飛行器系統之間的通信。通過實驗驗證,該巡線系統具有較高的實時性和準確性。
1 多旋翼飛行器原理及結構設計
為了實現這種以多旋翼無人飛行器為載體的輸電線路巡檢模式,關鍵問題就在于多旋翼無人飛行器和無線傳輸通信手段的研究。此無人機巡檢系統示意如圖1所示。

圖1 多旋翼無人飛行器巡檢系統示意
1.1 飛行原理
多旋翼飛行器是一種結構簡單、控制上也容易分析的飛行器。多旋翼飛行器通過多個旋翼的正反槳以及不同的轉向與轉速,形成由多個與機體垂直的升力和多個反扭力合成的動力面。通過改變這些力的大小與方向,動力面便具有全角度牽引機體的能力。但因為飛行狀態是不穩定的,因此為了控制每一個電機的輸出量便需要一套飛行控制系統進行實時調整。控制系統按照一定頻率對飛行器姿態檢測,根據測量結果計算出控制量,最終根據需求調整多個電機工作狀態,即可改變飛機的動力面。多旋翼飛行器動力示意如圖2所示。

圖2 多旋翼飛行器動力示意
1.2 結構設計
多旋翼飛行器的結構設計核心部分為中心板,中心板部分需要兼顧鎖緊機臂,提供動力電池的固定點,安裝無人機飛控模塊,安裝更多的拓展模塊等功能。本設計中采用的多旋翼主體結構固定方式為上下2層碳纖維板配合鋁合金螺柱用以夾緊6條機臂,3條中心板的對角線上設計了6對高強度工程塑料的鎖定管夾,用于固定多旋翼無人飛行器的6條支臂模塊。機架渲染示意如圖3所示。
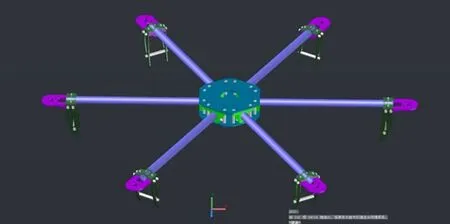
圖3 機架渲染示意
多旋翼飛行器結構設計是一個非常重要的部分,具有以下特點:① 大量采用碳纖維板與碳纖維管,強度大,韌性好;② 采用模塊化設計,更換零件容易,方便維修;③ 機身可折疊,關節部分可以自鎖,結構穩定牢固。
2 系統設計
本多旋翼無人飛行器巡檢系統主要分為多旋翼無人飛行器、視頻拍攝傳輸模塊和地面基站3部分。多旋翼無人飛行器的設計部分已經在上節介紹了,本節主要介紹視頻拍攝傳輸模塊和地面基站部分。
2.1 視頻拍攝傳輸模塊
在多旋翼飛行器電力尋線的工作過程中,需要一個清晰度高、抗干擾強的輕量化無線視頻傳輸系統。根據上述需求,設計了一種符合需求的HD高清視頻無線傳輸系統。該系統采用了一種基于Linux的嵌入式操作系統[11],通過數字高清攝像頭進行視頻捕捉,并使用2.4 GHz無線網橋將視頻信號傳回地面,從而實現HD高清視頻的無線傳輸。
網橋[12]是整個系統的重中之重,只有選擇合適的網橋,高清視頻流才能快速而又準確無誤地傳回地面站。經過慎重考慮與分析,采用UBNT網橋[13],該網橋是Ubiquiti Networks公司在全球范圍內設計、制造和銷售創新性的寬帶無線解決方案,具有顛覆意義的無線產品。該網橋的優勢在于任何一個型號的UBNT產品,均可被作為無線覆蓋AP、點對點網橋、點對多點網橋和無線客戶端(CPE)等多種角色。
2.2 地面基站
電力巡線地面站支撐系統的核心是系統的計算機平臺,根據要求,采用了一種基于Intel最新款低功耗處理器的操作系統,該系統采用Windows、Linux雙支持的平板電腦作為計算機平臺[14],具有低功耗、操作簡單、易于上手的特點。與此同時,在地面站支撐系統中安裝了一個14英寸LED液晶屏輔助顯示,具有低功耗、高對比度等特點,增大了顯示面積,以便于巡線圖像的實時觀察。
在地面基站控制系統中,可以根據無人飛行器傳輸回的圖像能夠較為精確地找到巡線的初始位置,并實現對無人飛行器的控制。手動控制系統是嵌入式的無線電發射機控制裝置,配備了128 pixel×64 pixel分辨率的彩色液晶顯示屏,2個2軸的萬向遙桿,3個可變旋鈕,6個2位開關,1個3位開關和一些微調按鈕。硬件系統的工作流程如圖4所示。

圖4 地面基站控制系統工作流程
2.3 整體系統結構設計
整體的硬件系統結構如圖5所示。

圖5 硬件系統結構
整個硬件系統結構主要包含了多旋翼無人飛行器組件[15]、核心控制單片機、HD高清視頻模塊、無線網橋和地面基站,采用模塊化、分層隔離的設計思想,從而確保了系統的運行效率和準確率。
3 實驗驗證
3.1 實驗準備
樣機裝配如圖6所示。

圖6 樣機裝配
在機架的選擇上,采用了碳管為機架的主體。由于碳管具有優異的電學性能,場發射性能以及獨特的結構等特點使得碳管更能夠有效抗強電磁干擾。碳管對電磁波的屏蔽主要原因是碳管對電磁波具有較強的吸收作用。數據鏈無線通信系統采用了跳頻技術,其本質上是一種利用載波跳變實現頻譜展寬的擴頻技術,可以有效地避開干擾。跳頻示波器演示如圖7所示。

圖7 跳頻示波器演示
實驗開始之前還需要校準PID、手動遙控設備、加速度計和羅盤等,校準示意如圖8所示。

圖8 飛行器校準示意
3.2 實驗結果分析
Mission Planner操作界面如圖9所示。多旋翼無人飛行器在試飛過程中向地面基站傳回了實時視頻畫面,并且畫面清晰,地面基站得到實時巡線視頻以后可以對視頻進行后續的處理工作,對于及時并且準確發現高壓輸電線路故障問題具有很重要的意義。在地面基站,操作人員可以通過Mission Planner操作界面實時操控無人飛行器,實現無人機實時巡檢高壓輸電線的工作效果。

圖9 Mission Planner操作界面
高壓線路演示如圖10所示。識別電力線演示DEMO,可以手動將多旋翼飛行至電力線路周圍,采集圖像后通過霍夫變換,將所拍到的圖像轉換為灰度圖像,通過軟件計算識別出目標電力線,去除無意義的圖像,幫助巡線人員更準確地判斷高壓輸電線路的損壞類型以及損壞程度。

圖10 高壓線路演示
4 結束語
多旋翼無人飛行器巡線系統結合了物聯網技術,在Linux嵌入式操作系統下通過攝像頭進行視頻捕捉,并通過網橋將信號實時傳回地面。實驗演示結果表明,該系統具有較強的實時性和很高的準確率,實現了以較低的成本完成高清視頻的傳輸,有助于及時發現高壓輸電線路故障,幫助巡線人員更準確地判斷高壓輸電線路的損壞類型以及損壞程度,對于解決高壓輸電線路檢修難這一問題具有前瞻性意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
