小型風/光/儲微電網實驗平臺
2020-09-28 09:19:24宋關羽王智穎許兆峰
實驗技術與管理 2020年5期
宋關羽,袁 浩,王智穎,李 鵬,許兆峰,李 輝
(1.智能電網教育部重點實驗室(天津大學),天津 300072;2.清華大學 動力工程及工程熱物理國家級實驗教學示范中心,北京 100084)
微電網是指由分布式電源、儲能裝置、能量轉換裝置、相關負荷和監控、保護裝置匯集而成的小型發配電系統,是一個能夠實現自我控制、保護和管理的自治系統,既可以與外部電網并網運行,也可以孤島運行[1-3]。作為實現分布式電源接入與管理的最有效平臺,微電網在提高配電層面可再生能源消納能力,提升配電系統運行可靠性、安全性、經濟性等方面均發揮著重要作用,具有巨大的社會與經濟意義,近年來在國內外相關領域掀起了研究和建設熱潮[4-7]。
在微電網領域,多所高校均開設了相關課程,如新能源與智能電網、分布式發電與微電網等。風/光/儲微電網實驗平臺的建設將對相關課程形成良好支撐,有助于學生接觸前沿技術,了解國內外先進技術發展方向,初步掌握微電網系統設計方法、組成結構及運行方式,從而加深對課堂所學知識的理解與認知[8-10]。同時,在微電網平臺設計與實現過程中,學生將綜合運用本科階段所學知識,全面提升實踐操作能力,從而進一步提高綜合素質[11-13]。
1 實驗平臺設計
1.1 模擬風力發電系統設計
本實驗平臺采用永磁同步電動機模擬原動機帶動發電機運行,如圖1 所示。通過調節變頻器的設置頻率改變轉矩,使同步電動機可以運行在不同的轉速下。當風機的運行頻率與電網的頻率相近時,可以調節發電機的勵磁,使其發出的電壓與電網電壓幅值相近,之后若相序正確,則可以利用同期表手動并網,使風機發出的電供給電網側。調節電動機的頻率來改變轉矩,可以調節輸入電網的有功功率;改變發電機的勵磁,可以調節輸入電網的無功功率。
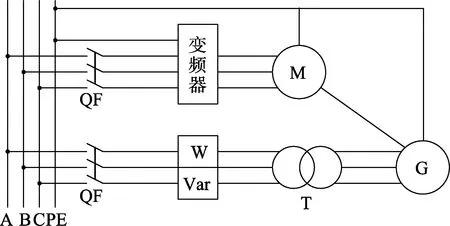
圖1 模擬風力發電系統結構圖
本實驗平臺采用FR-E700 系列通用變頻器,選取先進磁通矢量控制方法和外部運行模式控制交流電動機,實現電壓補償,使電機電流與負載轉矩相匹配,從而提高低速轉矩;同時實現頻率補償,使電機實際轉速與速度指令值接近,維持交流電動機在負載變動較為劇烈的情況下穩定運行。變頻器的控制指令由可編程控制器(programmable logic controller,PLC)給出,通過連續調節頻率,模擬不同風速條件下風機的運行狀態。
1.2 光儲系統設計
本實驗平臺采用的光儲系統由光伏電池板、光伏控制器和蓄電池構成。實際太陽光由LED 燈光進行模擬,光源可在導軌上移動。光源和光伏電池板分別由一個伺服電機拖動,改變各自的位置。
本實驗平臺的伺服電機是MELSERVO-J3 系列電機(以下簡稱MR-J3)。MR-J3 支持位置控制、速度控制、轉矩控制、位置/速度切換控制、位置/轉矩切換控制等多種控制模式。借助USB 和RS-422 串行接口,可實現計算機對伺服放大器參數的設定、試運行、狀態監控和增益調整等。MR-J3 系列伺服電機采用了分辨率為262 144 脈沖/轉的絕對位置編碼器,可進行高精度控制。本系統采用MR-J3 速度控制,通過外部模擬速度指令或參數設置的內部速度指令,可以對伺服電機的速度和方向進行高精度平穩控制。
光源和光伏電池板的定位采用三菱 PLC 中的QD75 定位模塊,具體接線如圖2 所示。QD75 可以支持任何定位系統所需的各種定位控制,如定義任意位置、固定位置控制等。
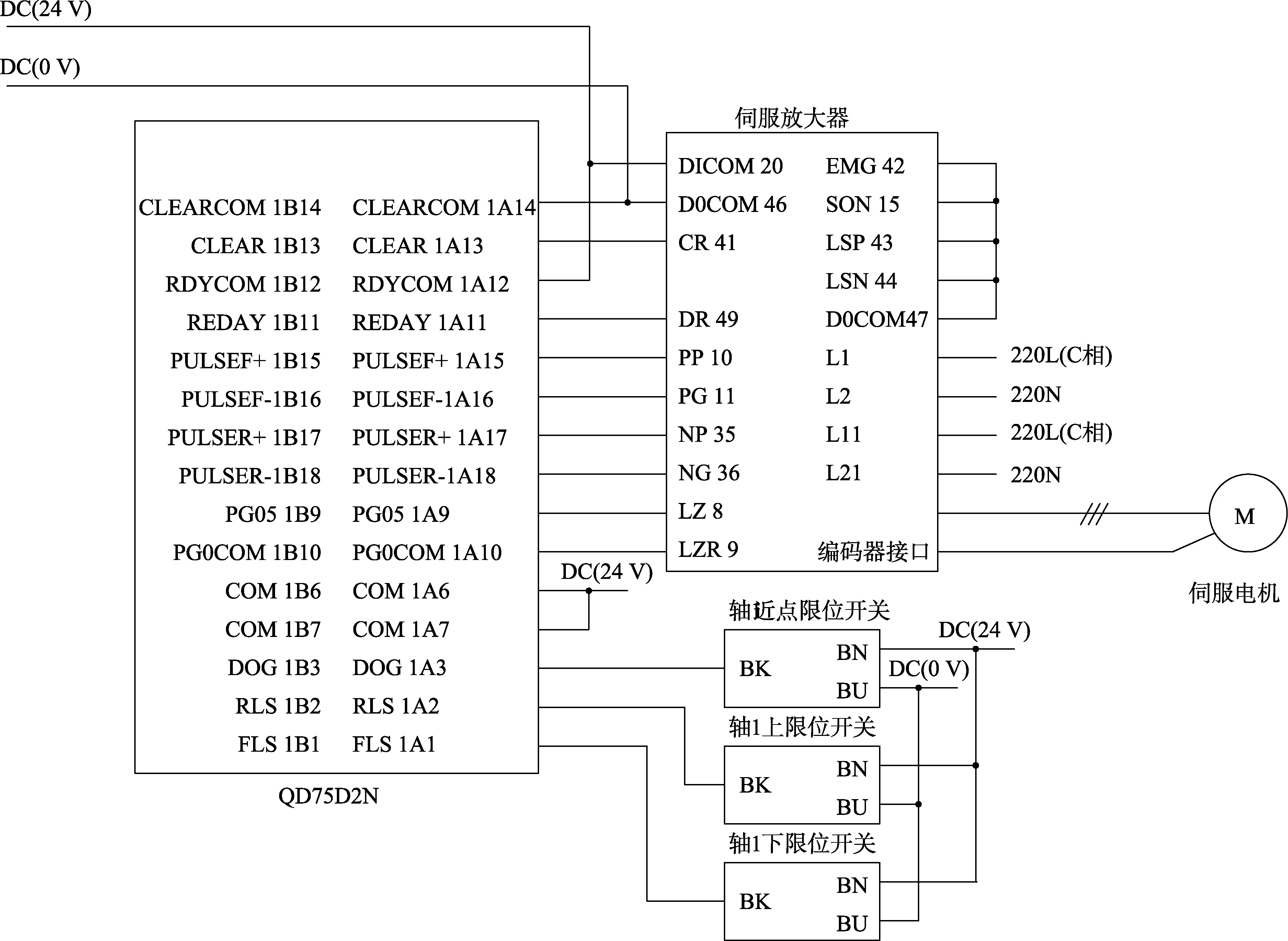
圖2 光伏跟蹤系統接線圖
光源選擇QD75 專用指令完成原點回歸,依據所設置的控制參數和定位數據,輸出指定頻率脈沖至伺服控制裝置。光源移動按照運動控制CPU 指令進行;光伏電池板依據光照傳感器信號進行光照跟蹤轉動,以獲得最佳的照射角度,從而提高光伏出力。光伏電池板的隨動過程同樣采用QD75 型定位模塊,并借助A/D 轉換模塊,對光照信號采集和處理轉換,通過一系列運算形成輸出脈沖,給入伺服放大器。光源的移動必然會使得光照傳感器在一段較短時間接收到的信號出現差別,系統對信號差值進行放大,以脈沖輸出的形式給入伺服放大器,從而驅動光伏電池板實現光源跟蹤。
1.3 數據采集系統設計
本實驗平臺數據借助EMM800B 型數字式功率表采集聯絡線、模擬風力發電系統、光儲系統的電氣信息,包括有功/無功功率、相/線電壓、相/線電流、功率因數、諧波分量等,并借助QJ71C24N 模塊與人機界面通信,該模塊通過RS485 總線將所需數據讀取至PLC 中,同時在人機界面中實時顯示。
1.4 平臺架構設計
本實驗平臺的運行過程主要分為外界指令輸入、光伏跟蹤、模擬風機并網、實時狀態顯示四個部分,平臺結構示意圖如圖3 所示。系統與外部的交互通過人機界面與PLC 之間的通信進行。在人機界面中設計登錄過程,通過設置管理員、操作員權限對人機界面的不同功能進行加密,方便管理人員、操作人員使用和技術人員維護[14-16]。
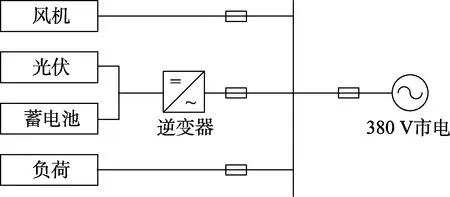
圖3 微電網平臺結構示意圖
微電網平臺所選取的設備型號及容量參數如表1所示,實物見圖4。
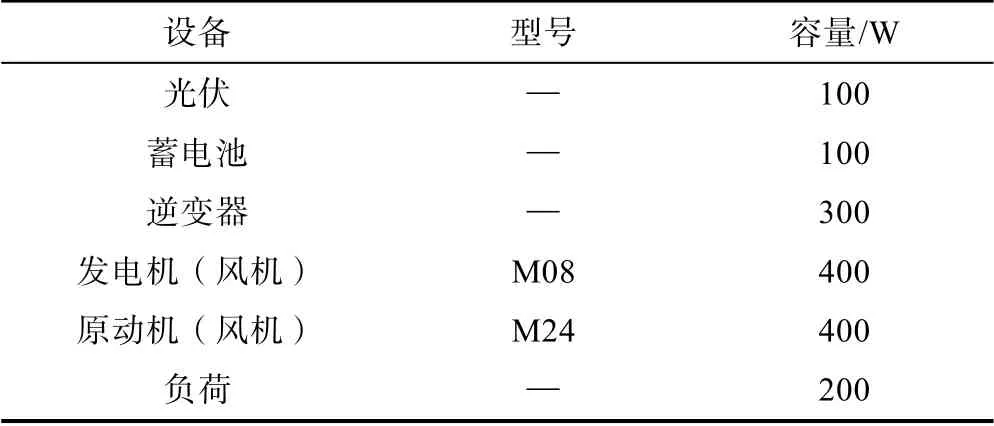
表1 系統設備參數

圖4 微電網系統實物圖
針對風力發電系統,設置變頻器頻率輸入、正反轉以及急停按鈕,實現操作人員對于交流電動機的啟停及轉速控制。操作人員還可以使用多功能功率表對風機運行狀態進行實時檢測。在人機界面手動輸入不同頻率值,可完成對模擬風機的不同轉速控制。
針對光伏跟蹤系統,利用對應開關量觸發連接機器PLC 中的電機起動和停止信號,設置電機起動和停止按鈕。同時可通過觸摸屏控制光源的不同運行速度,使得操作人員可以通過人機界面完成對電機基本參數的設置。
此外,在觸摸屏上設置運行狀態界面,完成對系統PLC 的控制狀態、電機轉動參數、系統運行參數的同步監視。當系統運行達到預計天數時,人機界面會顯示報警,方便操作人員進行檢修。利用光照傳感器測量光照信號,再通過A/D 轉換模塊和CPU 處理采集回來的信號,實現對于光源位置及運動信息的測量。
2 實驗設計
2.1 模擬風力發電系統并網實驗
本實驗平臺采用準確同步法實現模擬風力發電系統并網。準確同步法是將發電機調整到完全符合并網條件后進行合閘并網操作,并采用同期表來判斷條件的滿足情況,具體步驟如下:
(1)將要投入并聯運行的發電機拖動到接近同步轉速,利用相序表測量相序,并作出相應調整,保證二者相序一致;
(2)投入勵磁并調節至機端電壓與電網電壓相等,投入同期表,觀測S 指針順時針旋轉;
(3)當指針指向12 點方向時,迅速按下并網開關,交流接觸器主觸點吸合,完成并網操作。
并網時,為了避免發生電磁沖擊和機械沖擊,要求發電機側各相電壓的瞬時值與電網側對應相電壓的瞬時值完全一致,包括波形、頻率、幅值、相位和相序等。若波形不同,例如一個是正弦波,另一個是非正弦波,則并聯后會產生一系列高次諧波環流,從而增加損耗和溫升,降低效率;若頻率不等,則會產生差頻電流,在發電機內部引起功率振蕩;若幅值或相位不等,則會在電機與電網間產生環流,特別是若在極性相反時合閘,會產生巨大沖擊電流,從而產生巨大電磁力,損壞定子繞組端部,甚至損壞轉軸;若相序不同,合閘也是絕對不允許的,例如只A 相符合,則B、C 兩相之間的巨大電位差會產生巨大環流和機械沖擊,嚴重危害電機安全。波形和相序分別由電機的設計制造和安裝接線予以保證,因此并網時保證頻率、幅值、相位滿足條件即可。
2.2 光伏跟蹤系統實驗
光伏跟蹤系統實驗主要是為考查學生對光照信號的處理以及光伏跟蹤控制方式的掌握情況而設計的。采集的光照模擬信號在傳輸以及A/D 轉換的過程中,會受到外部環境的干擾,從而產生高頻噪聲、漂移等信號失真問題,采用軟件數字濾波可以有效地提高采樣信號的信噪比,從而提高采樣信號的可靠性和實時仿真的準確性,同時還具有速度快、精度高、成本低等優點。本實驗平臺采用有限沖激響應數字濾波法,同時也支持學生開展多種濾波算法的測試與實踐。光伏跟蹤控制主要依據光源位置和光照強度變化共同判斷,學生可根據實驗情況靈活設計判別邏輯,實現光伏系統跟蹤。
3 教學特色與成果
3.1 教學特色
風/光/儲微電網實驗平臺主要用于高年級本科生了解微電網結構及組成,掌握微電網并網運行方式,增強對微電網系統的直觀認知。實驗內容依托“分布式能源與微電網”創新課,儀器設備常年開放,可供本科生靈活選擇時間進入實驗室開展相關實驗。同時依托智能電網教育部重點實驗室,可使學生進一步了解真實光伏、風電系統的運行狀況,從而提高實踐能力。
3.2 教學成果
實驗平臺已用于多門本科生課程的認識、實踐環節,并為部分研究生提供科研服務,提高了不同層次學生的動手能力和實驗開發水平,其真實、具體、形象的特點得到師生歡迎。
4 結語
風/光/儲微電網實驗平臺集成了風、光等分布式電源及儲能系統,設計并實現了模擬風力發電并網實驗和光伏跟蹤實驗,綜合考慮了分布式發電、微電網方向多門核心課程的實驗內容,充分發掘了現有實驗資源,增強了學生的動手實踐能力,提升了學生對設計、實施實驗的興趣。實驗平臺與理論教學相輔相成,有利于建設綜合性、研究型、開放式的專業教學體系,切實增強學生的實踐能力和綜合素質,為培養綜合型的“卓越電氣工程師”打下良好的基礎。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
