船模拖曳水池教學實驗室測試平臺設計
2020-09-28 09:20:16李廣年李家旺郭海鵬
實驗技術與管理 2020年5期
李廣年,李家旺,杜 林,郭海鵬
(寧波大學 海運學院,浙江 寧波 315611)
實驗教學在創新性人才培養中扮演著重要的角色[1-2]。教育部《關于全面提高高等教育質量的若干意見》提出“創新教育教學方法,倡導啟發式、探究式、討論式、參與式教學”[3]。實驗教學很大程度上依賴于實驗室建設與實驗測試技術,因此教學實驗室建設、實驗測試平臺開發與應用在提升高校教學質量過程中尤為重要[4]。
1 船模常規水動力測試平臺
船舶與海洋工程專業(以下簡稱船海專業)是傳統的工科專業,實驗教學在船海專業教學中扮演重要的角色。航行性能是船舶的基本性能,也是船舶總體技術的核心,涉及諸多學科領域,長期以來航行性能的研究主要依靠模型試驗實現[5-6]。19 世紀60 年代,英國造船學家W.Froude 首先提出用船模試驗的方法確定實船在航行時所遭受的阻力。模型試驗研究對于正確預報實體的水動力性能、設計具有優良水動力性能的實體,乃至促進船舶與海洋工程流體力學學科的發展等方面,都有十分重要的作用。因此歐美國家紛紛建立了眾多的船模拖曳水池及其他實驗設施[7]。一個多世紀來,世界上建成了大量的、耗資巨大的船模試驗水池,為航行性能的研究提供了模擬試驗環境。從造船史上來看,這是一個造船大國和造船強國不可缺少的基本研究條件[8]。第21 屆國際船模試驗池會議(International Towing Tank Conference,ITTC)重新制定的章程中指出,ITTC 的主要任務是促進解決船模試驗池負責人十分關注的重要技術問題。歷屆ITTC都非常關注測試技術的開發與探索。測試分為動態測試和靜態測試。如果被測量不隨時間變化,稱這樣的量為靜態量,相應的測試成為靜態測試;反之為動態測試[9-10]。測試在船模試驗中起著至關重要的作用,船模水動力試驗的成功與否,很大程度上依賴于測試方法是否正確、測試技術是否先進以及測試系統是否完善。
本文以一尺寸為135.0 m×7.0 m×5.2 m 的大型拖曳水池(見圖1)為載體,為滿足教學實驗需要,設計了一套船模常規水動力測試平臺。該平臺由阻力試驗測試系統(含波浪增阻測量系統)、自航試驗測試系統、敞水試驗測試系統、數據測量控制分析處理系統和校驗系統等組成。該系統能對試驗過程中水面船模的阻力、縱傾、螺旋槳模型的推力、扭矩等參數進行測量和分析。

圖1 拖曳水池
2 阻力試驗測試系統
試驗時船模由拖曳裝置(含抱緊裝置)拖動,拖車速度即模型速度,拖車在加速或減速時,由抱緊裝置夾住船模,以防阻力儀過載。船模的航向由艏、艉導航裝置(含升沉測量)保持,船模速度穩定后,測量其阻力、縱傾(升沉)。考慮到水池拖車測量橋布置長度有限,以及船模尺度的限制,系統方案組成上擬采用兩個“二合一”,即拖曳、抱緊裝置合一,導航、縱傾測量裝置合一,以解決布置上的困難。此外,進行波浪增阻試驗時,先利用阻力儀測量靜水中阻力,再通過四自由度試航儀測量波浪條件下的船模阻力,從中減去靜水阻力得出波浪增阻,波浪參數由浪高儀測量。
船模拖曳裝置用于船模拖曳,要求拖曳時阻力儀與抱緊裝置聯動,實現對阻力儀的過載保護,同時拖點上下可調,拖曳、抱緊兩合一。船模導航、縱傾測量裝置用于保持船模直航及測量船模縱傾,要求船模導航裝置低摩擦,縱傾裝置不對船模運動造成干擾。阻力儀用于測量船模阻力,要求線性好、零漂小,輸出穩定、靈敏,抗干擾能力強。浪高儀用來測量波浪參數,要求系統零漂小,輸出穩定、靈敏,抗干擾能力強。
船模拖曳裝置拖動船模,氣動抱緊。采用應變式電測阻力儀,目前先進的阻力儀本身自帶船模縱傾測試功能,當然船模縱傾也可由專門的縱傾測量裝置來測量,要求該裝置不會干擾船模運動。在水池內定點和水車各布置一臺浪高儀,用以測量波浪參數。測試系統框架如圖2 所示,測試儀器應達到的參數范圍見表1。
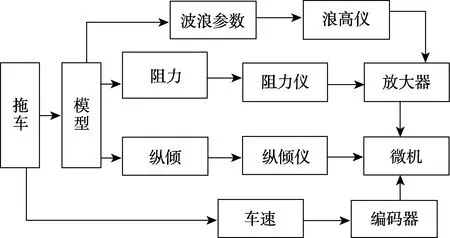
圖2 阻力試驗測試框圖
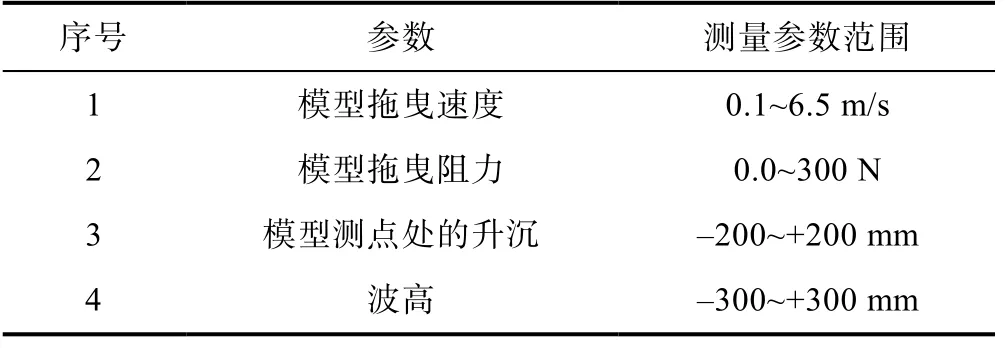
表1 阻力試驗測試參數及范圍
3 自航測試系統
水面船模自航試驗采用強迫自航試驗法,船模在強制力及螺旋槳推力的共同作用下保持某一穩定航速。試驗時根據不同需要,取若干個不同車速,在每一車速下變化幾個轉速,測量相適應的強制力、推(扭)力、轉速和車速。強制力由阻力儀測得,螺旋槳推力和扭力由自航儀測量。
自航試驗測控系統采用“自航儀+齒輪箱+電機”的形式,用于實現雙槳自航試驗測試。雙槳自航試驗時,左右槳的推力和扭力分別由兩自航儀測量。通過齒輪箱可實現一臺電機對左右雙槳的控制,以保證左右雙槳轉速的同步。轉速的調節與車速一樣,可由直流調速裝置進行。編碼器每轉脈沖不小于1000 Hz。測試系統框架見圖3,測試參數及范圍見表2。
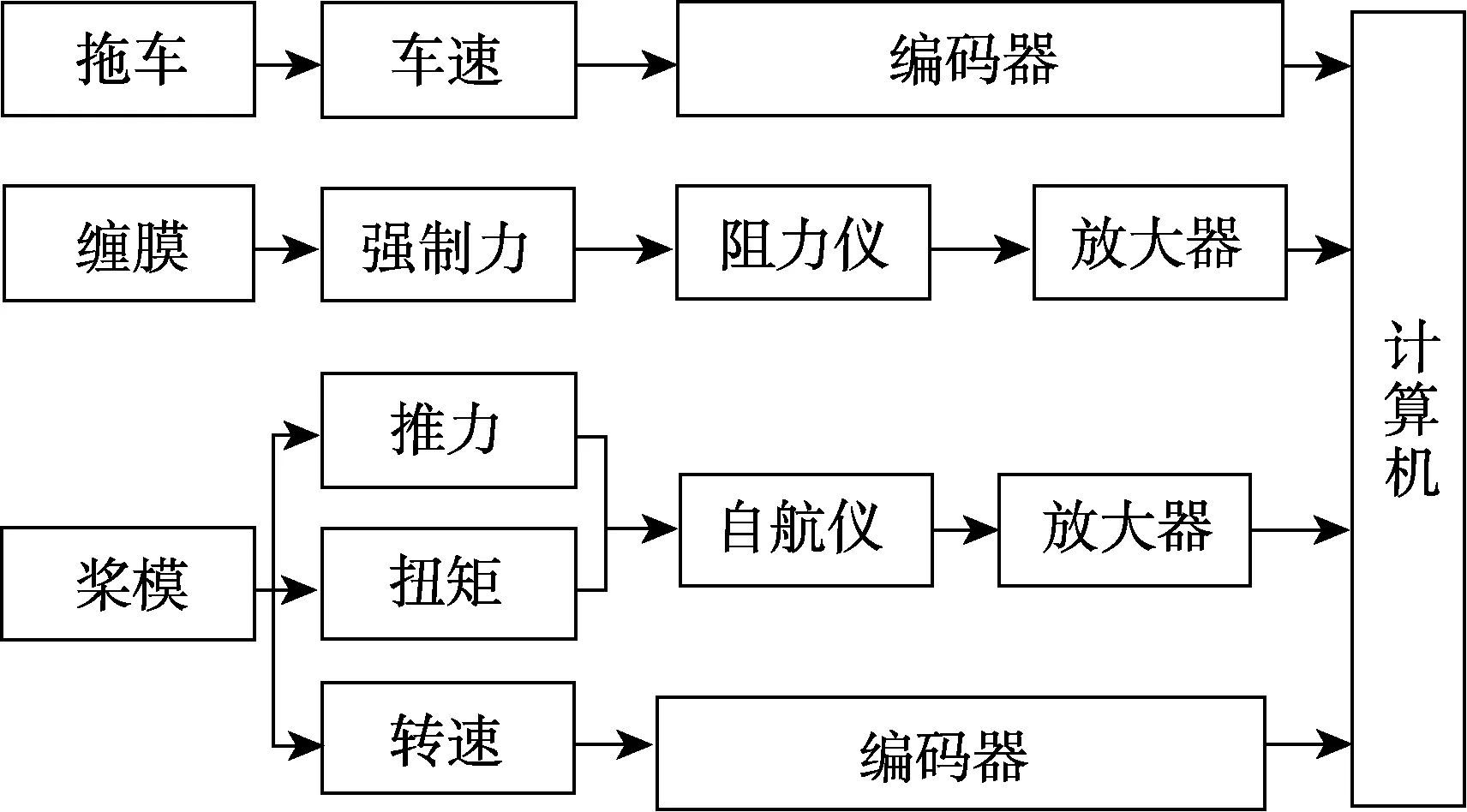
圖3 自航測試系統框圖
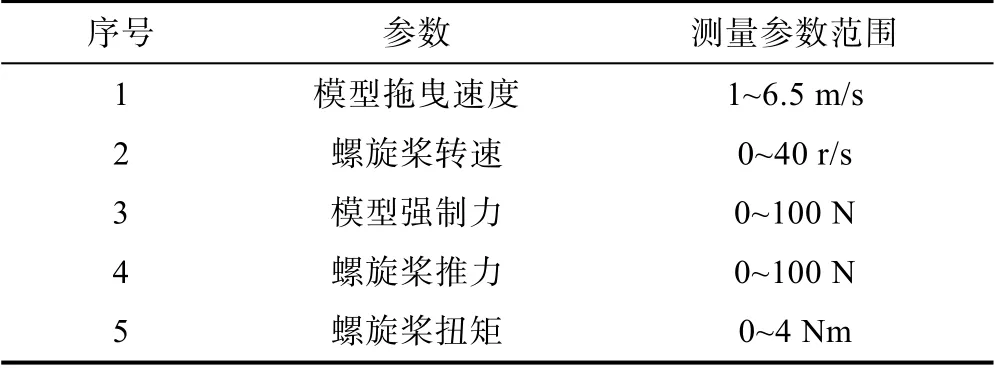
表2 自航試驗測試參數及范圍
4 螺旋槳敞水測試系統
敞水試驗可采用敞水箱方式或專用敞水動力儀進行,本系統擬選用專用敞水動力儀方式。試驗時采用等車速、變轉速的方法改變螺旋槳進速,由低到高,至螺旋槳推力為零為止,得到一條完整的螺旋槳敞水曲線。
螺旋槳敞水動力儀主要由推力、扭矩測量單元,轉動傳動機構,劍狀(橫剖面為翼型,減小對流體的擾動)支撐系統及安裝支架等組成。其中推力、扭矩測量單元布置在水密的流線型回轉體外殼內,垂向支撐也采用翼形剖面形式,以減少對流場的干擾。為減小水下流線型回轉體直徑,并使系統簡單化,驅動電機可安放在流線型回轉體外殼外,通過傳動系統驅動螺旋槳轉動,提高試驗測試精度。敞水動力儀的量程最好選定為比實際試驗常用最大參數范圍稍大些,一般不宜將動力儀設計成可變量程程式的結構,應避免經常拆裝動力儀測量單元,以免影響儀器測量精度和水密性。若確需經常更換量程,改用敞水箱進行敞水試驗是最簡單的方法。根據拖曳水池的實際情況,本系統敞水動力儀測量的最大推力選為200 N,最大扭矩為7 Nm,精度為0.5%,所配電機轉速為3000 rpm。敞水測試系統框架見圖4,測試參數及范圍見表3。
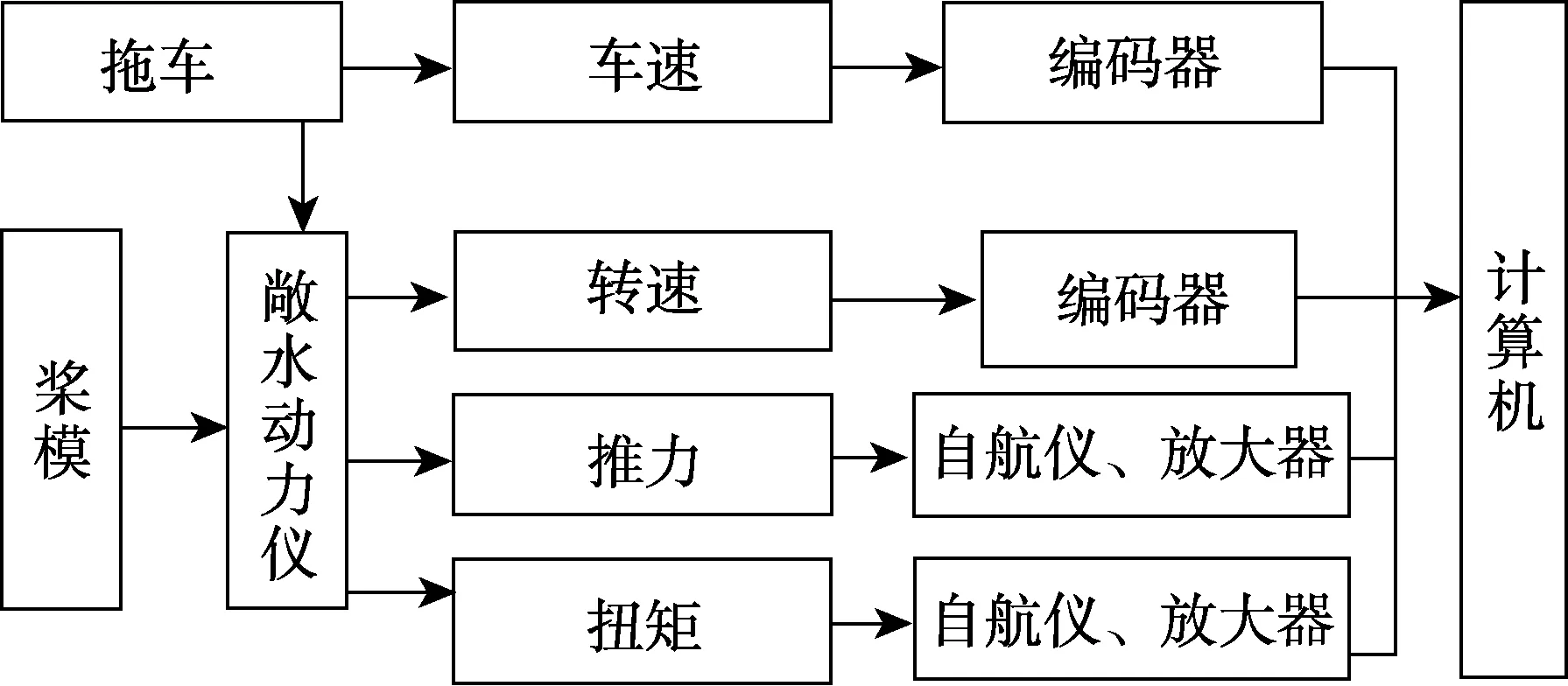
圖4 敞水試驗測試系統框圖
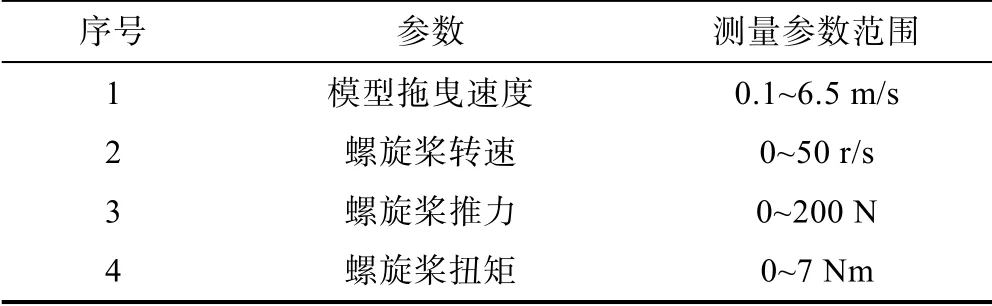
表3 敞水試驗測試參數及范圍
5 數據測量控制分析系統
數據測量控制分析系統的任務是通過計算機對試驗過程中的被控制量進行控制以及對測試量進行實時采集、儲存、分析和處理。自航及敞水試驗時需對槳模的轉速進行控制,提高試驗效率和數據精度。并對所有試驗中需要的參數進行采集、儲存、分析和處理。系統以計算機為基礎,包含必要的信號采集、放大、預處理、儲存、計算分析等功能,配置相應的濾波、放大器等二次儀表,配備工控機,實現多通道同時采樣,通道間無串擾影響,采樣頻率可調。
此外系統具有可擴充性,除了滿足上述快速性模型試驗需要外,還能滿足將來功能擴充的需要,比如增加有關程序處理模塊(如耐波性試驗程序等),為此系統在設計上實現模塊化并可擴充。數據采集、處理軟件采用統一的工作平臺和界面,依據阻力、自航、敞水等不同試驗類別,分別進入相關的采集、控制程序模塊,并調用各自的處理軟件進行分析、處理。系統界面可實時顯示被測物理量大小及變化曲線,在采樣過程中可動態切換或增減顯示通道,各通道同時工作,采樣、顯示、儲存同步。數據采集軟件流程如圖5 所示。
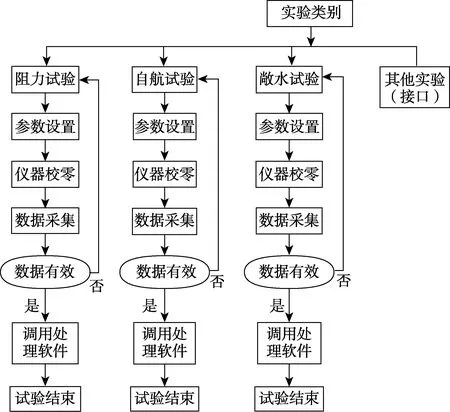
圖5 數據采集軟件流程簡圖
系統的硬件部分由傳感器、放大器、濾波器、A/D轉換器、計算機等組成,根據需要和可能,系統可利用計算機的通訊口(如IEEE1394 接口)進行數據傳輸,系統配備工控機和筆記本電腦,滿足實驗室和野外作業的需要。
6 測試系統校驗
測試系統校驗分為靜校驗和動校驗。靜校驗是在靜態的情況下,對測試儀器進行標定,通過對儀器靜態參數校驗,判斷儀器是否正常。校驗系統主要由專用校驗架、標準砝碼和數字電壓表組成,用于阻力儀、自航儀和敞水動力儀的靜校。校驗時將待校驗的阻力儀、自航儀等安裝在校驗架上,通過砝碼進行加載,傳感器輸出信號由數字電壓表讀取。校驗架除需實現對阻力、推力、扭矩等量的加載功能外,本身應有足夠的剛度、必需的安裝精度以及調節功能。動校驗通過標模試驗進行,將標模試驗結果與以往結果比較,以動態的形式判斷整個被校系統是否滿足試驗需要。
7 結語
本文以拖曳水池船模常規水動力教學實驗開展為出發點,設計了一套完整的測試系統,包括船模阻力試驗、螺旋槳敞水試驗、自航試驗以及測試儀器標定四個系統模塊,并編寫了數據測量控制分析系統軟件。系統具有可擴充性,除了滿足上述快速性模型試驗需要外,還能滿足未來功能擴充的需要,比如增加有關程序處理模塊(如耐波性試驗程序等)。實際運行情況表明該系統性能可靠、操作簡單。同時實驗室在“標準至臻、質量至上”的實驗教學理念指引下,根據實際運行狀況,對船舶性能教學實驗測試平臺逐步優化。通過測試平臺的搭建,進一步提升了實驗教學水平,使學生的綜合素質和科研服務能力得到顯著加強。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
