基于卷積神經網絡的路面識別及半主動懸架控制
2020-09-28 05:33:54劉秋孫晉偉張華胡煦顧亮
兵工學報 2020年8期
關鍵詞:模型
劉秋,孫晉偉,張華, 胡煦,顧亮
(1.北京理工大學 振動與噪聲控制研究所,北京 100081;2.西安航空學院 車輛工程學院,陜西 西安 710077;3.內蒙古一機集團宏遠電器股份有限公司,內蒙古 包頭 014000)
0 引言
車輛行駛過程中,實時準確地獲取當前的路面類型,可為車輛操縱穩定性、舒適性的改善提供重要信息。因此,能否準確識別車輛當前行駛的路面十分關鍵。
針對路面識別,目前主要采用以下兩種方法進行識別:1)通過加速度傳感器、位移傳感器采集由不同路面激勵引起的系統響應,通過對系統響應信號進行分析和處理,對不同的路面進行分類識別;2)利用車載攝像頭采集路面圖像,通過對圖像處理提取路面的紋理特征,從而對不同路面進行分類。
目前國內外研究人員對路面識別方法進行了大量研究,并取得了一定成果。Ward等[1]通過放置于懸架擺臂上的加速度傳感器,對磚石路、草路和沙石路等非城市路面進行了分類,將測量的加速度信號傳遞至動態車輛模型來估計地形輪廓,最后利用監督學習支持向量機(SVM)實現路面類型的識別。Qin等[2]通過布置于車身上的加速度傳感器測量簧載質量加速度來提取路面的時頻特征,對不同幅值或頻率的路面激勵引起簧載質量加速度變化特征進行識別,從而對不同國家標準路面等級(B級~F級)進行識別。Ngwangwa等[3]首先利用汽車振動系統8自由度模型,基于非線性自回歸(NARX)神經網絡并通過仿真建立了車輛響應和路面不平度的關系,其次通過傳感器測試和處理得到相應的車輛響應,最后應用預訓練完成的NARX神經網絡識別路面不平度。Bekhti等[4]首先通過攝像機采集前方的路面圖像,其次通過相應計算估計路面的紋理特征,最后計算路面紋理特征和振動情況的相關性,從而對前方路面的振動情況進行預測。Decatur[5]利用人工神經網絡提取雷達地形圖像的紋理特征對圖像進行分類,并與傳統的使用最大似然估計的貝葉斯分類進行對比,證明了前者的識別效率與精確度優于后者。王世峰等[6]使用加速度傳感器和圖像特征數據融合對非城市路面進行識別,并使用反向傳播(BP)神經網絡進行了分類。
盡管上述方法均能較準確地識別路面,但也存在一定缺陷。例如,當路面粗糙程度較差時(非城市路面),采用加速度傳感器和位移傳感器很難保證識別的精度;而采用圖像識別時沒有考慮自然環境下強光照、弱光照、圖像傾斜、圖像局部缺失等特殊情況對圖像質量的影響。此外,利用傳統BP神經網絡對圖像進行分類時需對圖像進行較復雜的人為預處理,無法直接將原始圖像數據作為網絡的輸入,同時當網絡神經元較多時BP神經網絡的權重參數會十分巨大,使網絡分類效率大大降低甚至無法進行分類。
本文通過采集路面圖像數據并利用卷積神經網絡(CNN)對路面類型進行識別。CNN的優勢在于它能夠通過簡單的卷積與池化運算從原始輸入圖像中自行提取特征,并根據BP算法自動更新網絡參數從而對圖像進行學習。為了模擬自然環境以及車輛振動對攝像頭采集圖像質量的影響,對訓練數據集進行數據增強,即隨機抽取若干路面圖像、人為調整其明暗度,或對圖像進行一定角度的翻轉、剪切以及一定像素的平移,以提高CNN識別的泛化能力。最后采用遺傳優化算法尋找不同路面下半主動懸架系統最優參數,并根據路面識別結果實現懸架控制參數在不同路面下的自適應調整。
1 1/4半主動懸架模型
本文以1/4車輛模型為基本框架,利用磁流變(MR)減振器模型作為阻尼元件、剛度為定值的傳統螺旋彈簧模型作為彈性元件組成1/4半主動懸架模型。
1.1 磁流變減振器模型
磁流變減振器外特性通常具有強烈非線性并帶有遲滯環,其建模的精確與否對懸架控制有較大影響。非參數化模型、偽靜力模型和參數化動力學模型是目前常用的3種磁流變減振器模型。其中參數化動力學模型對MR減振器外特性描述得最全面和準確。因此本文根據Kwok等[7]提出的參數化動力學模型對其進行建模。MR減振器遲滯模型示意圖如圖1所示。
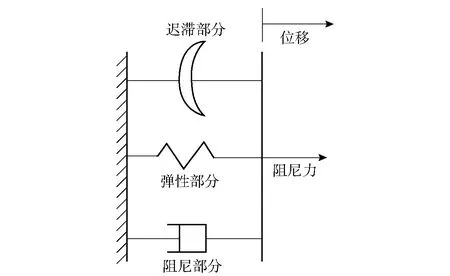
圖1 MR減振器遲滯模型Fig.1 MR damper hysteresis model
模型由遲滯部分、彈性部分、阻尼部分三者并聯組成,考慮上述三者的動力學特性,最終可得到MR減振器數學模型如下:
(1)

(2)

Kwok等[7]通過對MR減振器進行外特性試驗以及參數識別,得到上述待定參數的數學表達式,其中:
c=1 929I+1 232,
(3)
k=-1 700I+5 100,
(4)
α=-244I2+918I+32,
(5)
β=100,
(6)
δ=0.3I+0.58,
(7)
f0=-18I-257,
(8)
式中:I為MR減振器控制電流(A),I?[0 A,2 A]。
對模型加載幅值為0.08 m,頻率為2 Hz的正弦激勵。控制電流為0~2 A,間隔為0.25 A,則MR減振器速度特性曲線以及示功圖分別如圖2、圖3所示。
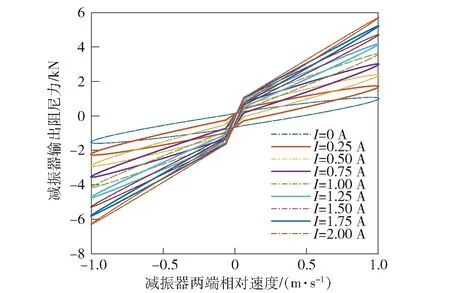
圖2 MR減振器速度特性曲線Fig.2 Speed characteristic curves of MR damper

圖3 MR減振器示功圖Fig.3 Indicator diagram of MR damper
1.2 1/4車輛模型
1/4車輛模型如圖4所示。圖4中,mb和mw分別表示簧載、非簧載質量,Ks、Kt分別表示懸架剛度和車輪剛度,xb、xw和xr分別表示簧載質量位移、非簧載質量位移和路面激勵。
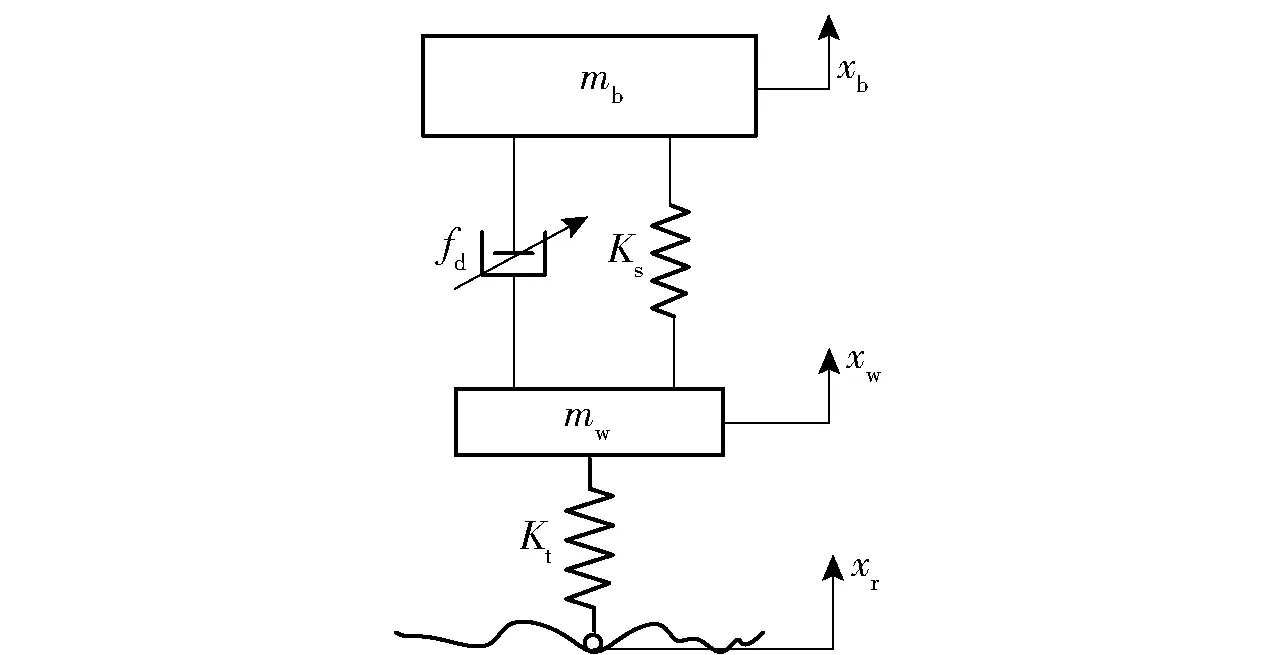
圖4 1/4車輛模型Fig.4 Quarter vehicle model
建立1/4車輛非線性系統模型如下:
(9)
(10)
1.3 路面不平度采集
將路面相對基準平面的垂直方向高度記為q,沿道路縱向的長度記為L,q隨著L變化的函數稱為路面不平度函數,記作q(L)。目前路面不平度的測量技術主要有不動基準測量法、隨動基準測量法、動態響應測量法、角度基準測量法等[8]。本文采用角度基準測量法,分別對瀝青路、水泥路、砂石路、彈石路路面不平度進行測量。測量儀器以及路面圖像分別如圖5、圖6所示。

圖5 路面不平度測試儀器及車輛Fig.5 Road roughness test equipment and vehicle
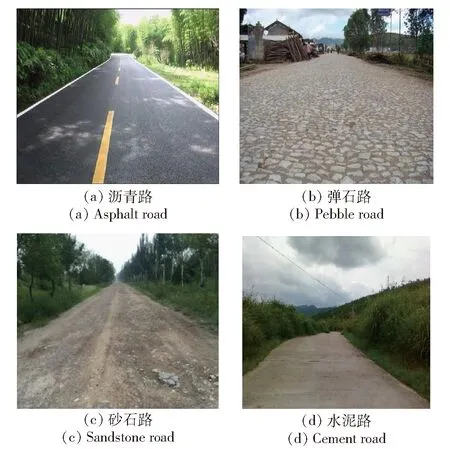
圖6 路面圖像Fig.6 Road images
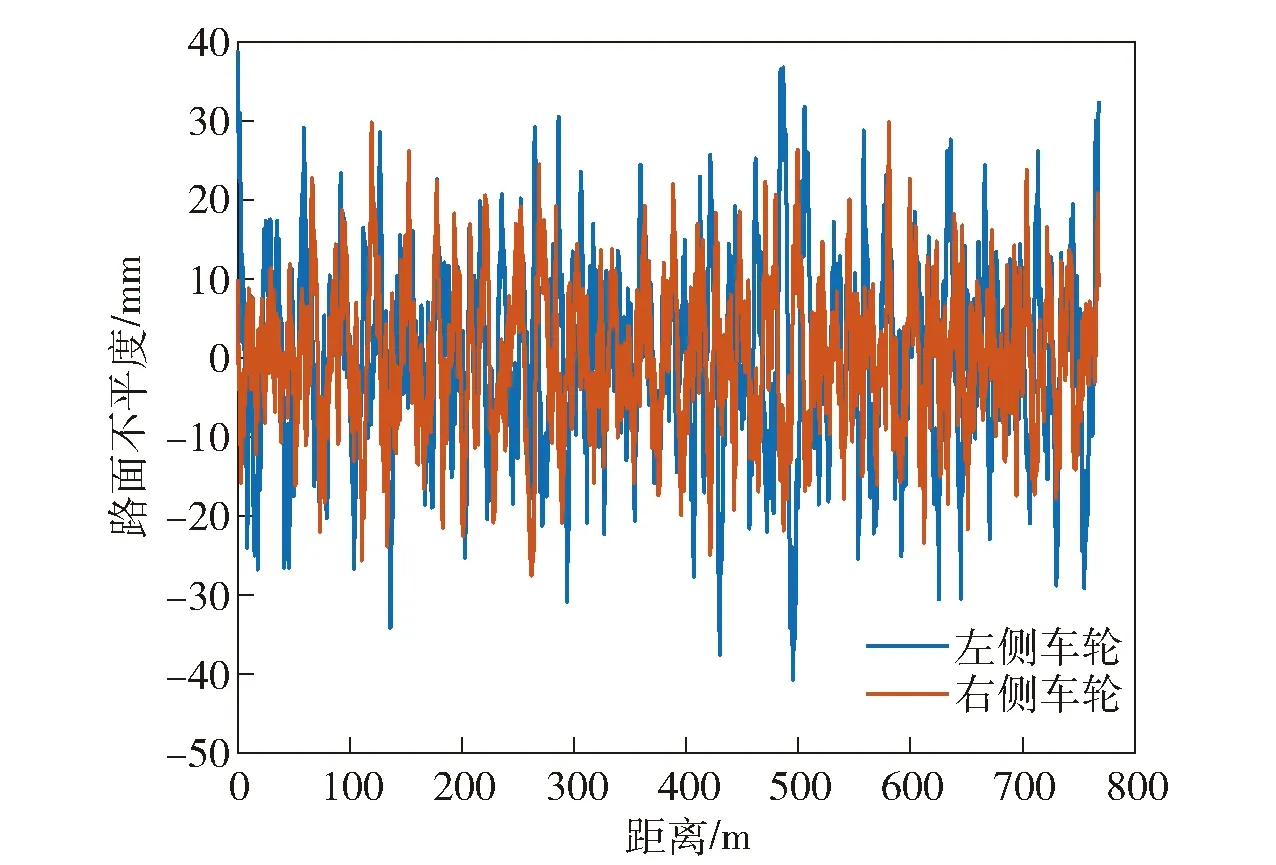
圖7 水泥路路面不平度實測曲線Fig.7 Measured curves of cement road surface roughness
4種路面不平度曲線如圖7~圖10所示。國家標準A級~F級路面按照1984年國際標準化組織文件ISO/TC 108/SC2N67中提出的表達式進行擬合[9]:
(11)
式中:Gq(n)表示路面不平度功率譜密度,n為空間頻率(m-1);n0為參考空間頻率,n0=0.1 m-1;Gq(n0)為n0下的路面功率譜密度值,稱為路面不平度系數(m3);W為頻率指數,分級路面譜的頻率指數W=2. 各等級路面不平度系數Gq(n0)的幾何平均值如表1所示。
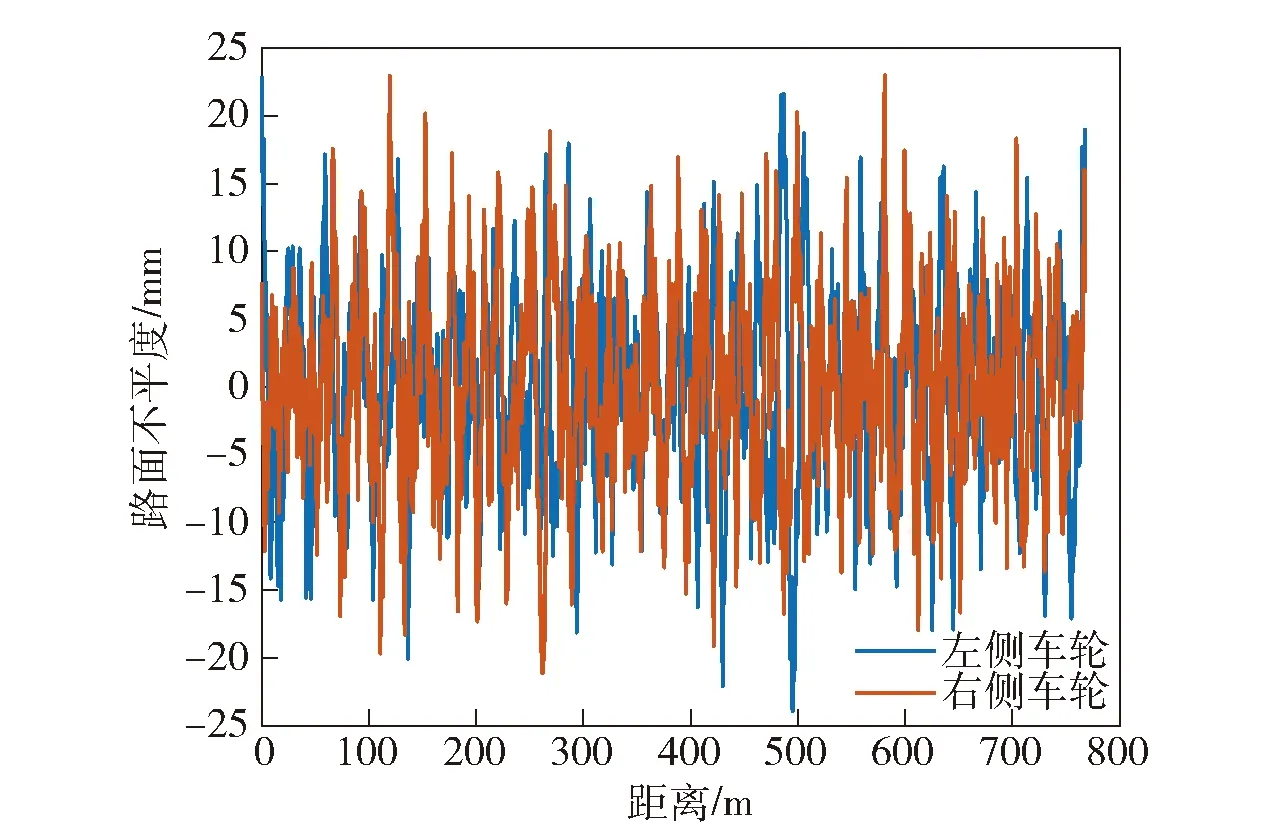
圖8 瀝青路路面不平度實測曲線Fig.8 Measured curves of asphalt road surface roughness
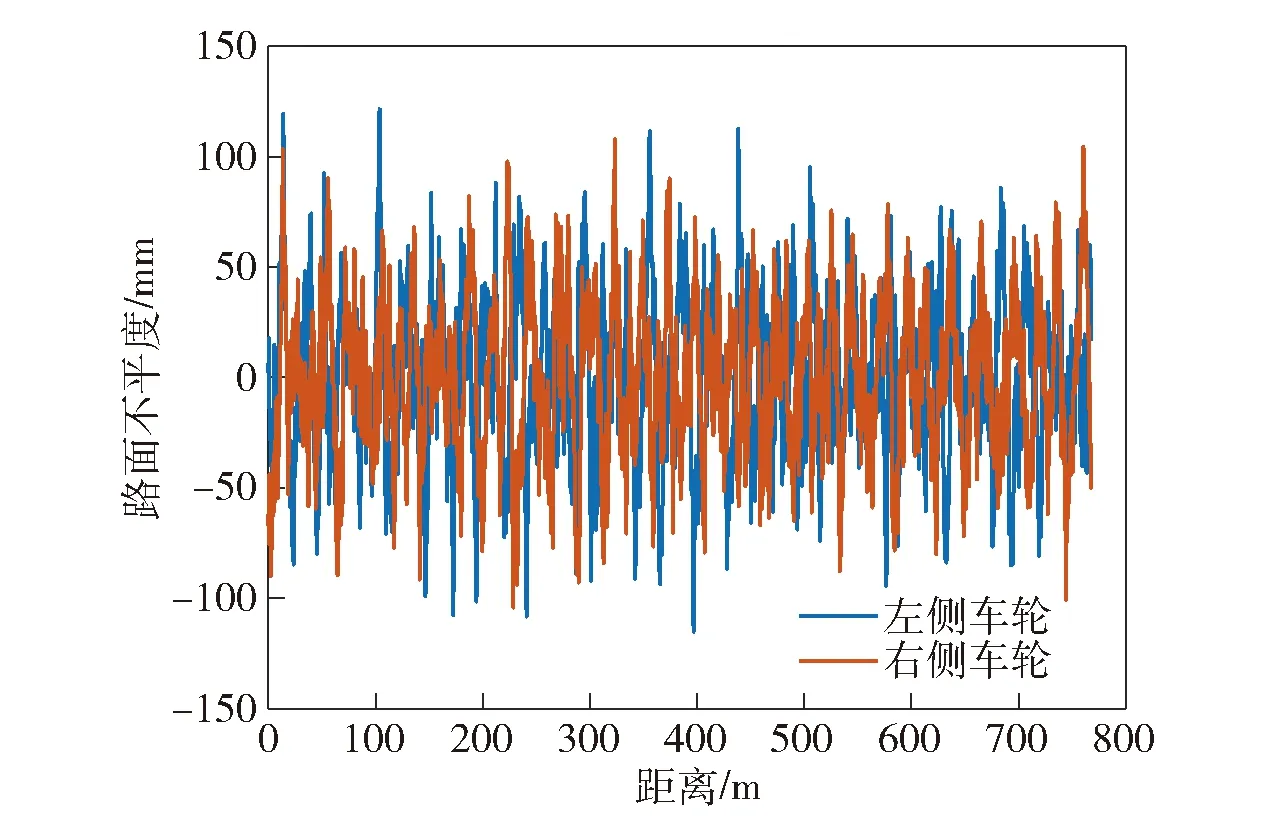
圖9 彈石路路面不平度實測曲線Fig.9 Measured curves of pebble road surface roughness
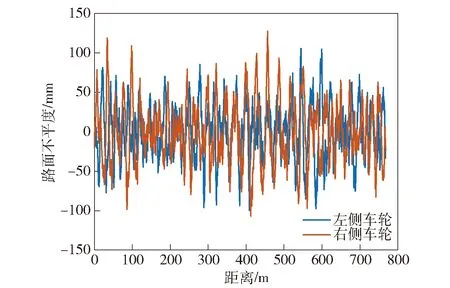
圖10 砂石路路面不平度實測曲線Fig.10 Measured curves of sandstone road surface roughness
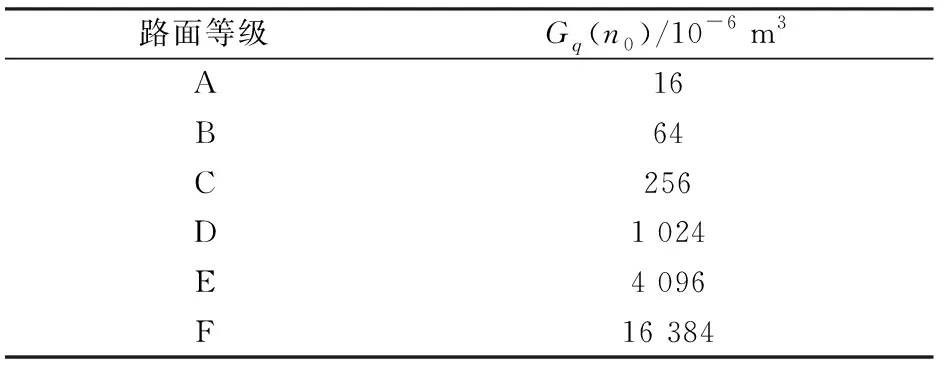
表1 A級~F級路面不平度系數幾何平均值Tab.1 Roughness coefficient geometric means ofA-F grade roads
將采集的4種路面與國家標準路面對比,如圖11所示(雙對數坐標系)。由圖11可見,在路面垂直位移功率譜密度曲線高頻段(空間頻率在0.28 m-1以上),瀝青路基本與C級路面重合,水泥路介于C級、D級之間,砂石路、彈石路分別與D級、E級路面基本重合。
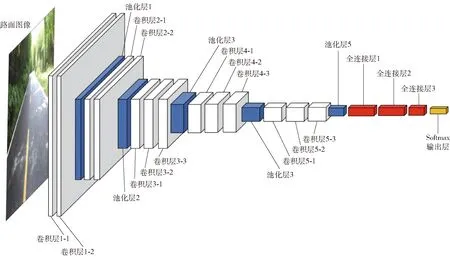
圖12 CNN結構圖Fig.12 Convolutional neural network structure

圖11 4種路面與國家標準等級路面功率譜密度曲線Fig.11 Power spectral density curves of four road surfaces and national standard grade road
2 基于卷積神經網絡的路面圖像識別
傳統的圖像識別方法通常不能將原始圖像直接作為分類器的輸入進行識別,需要利用不同算法人為地提取圖像紋理、顏色、或者一些更高級的特征,然后將計算得到的特征作為分類器的輸入進行分類識別。
深度學習動機在于建立、模擬人腦進行分析學習的神經網絡,模仿人腦的機制來解釋數據,例如圖像、聲音和文本。CNN作為深度學習框架之一,在圖像識別領域取得了巨大成功,相比傳統的圖像識別方法,其優勢在于它能夠通過簡單的卷積與池化運算從原始輸入圖像中自行提取特征,并根據BP算法自動更新網絡參數從而對圖像進行學習,是一種端到端的學習。同時CNN中神經元的稀疏連接以及參數共享能夠極大降低模型的計算量,使得更深的網絡結構、更高像素的圖像輸入成為可能。
2.1 CNN結構
本文通過搭建相應的CNN對不同的路面圖像數據進行學習,最終實現對路面識別的目的。所搭建的CNN結構如圖12所示。圖12中,包括13個卷積層、5個池化層、3個全連接層以及最后的Softmax輸出層。
針對圖像數據,卷積層中卷積的運算[10]如下:

(12)

在卷積層進行特征提取后,輸出的特征圖傳遞至池化層進行特征選擇,將特征圖中單個點的像素值替換為其相鄰區域像素值的統計量,以達到降維的目的。池化層進行特征選擇的方式主要有平均池化和最大池化。本文采用最大池化,即選取相鄰區域內像素值的極大值[11]。
當卷積核為大小f=1、步長s0=1的單位卷積核且不包含填充時,則(12)式表示全連接層內的矩陣乘法運算:
(13)
Softmax函數能將一個含任意實數的N維向量p壓縮到另一個N維實向量σ(p)中,使得每一個元素的取值范圍都在(0,1)之間,并且所有元素之和為1. 即將圖12中全連接層3的輸出轉化為輸入圖像屬于每一類別的概率[10]:
參照國內《獸用消毒劑鑒定技術規范》[8]及《消毒技術規范》[9]試驗方法進行。將菌株分別接種到瓊脂培養基劃線培養,傳至3 代,挑取單個菌落接種到相應的肉湯培養基中,37 ℃培養18~24 h,再分別接種到斜面培養基放4 ℃冰箱,儲存備用。
(14)
式中:pi為N維向量p中的第i個元素。
在加快網絡訓練速度的同時,為了防止梯度爆炸或消失以及陷入較差的局部最優值,本文通過批量歸一化規范各層網絡激活函數的輸入,防止訓練陷入激活函數中飽和的非線性區域,從而加快網絡的收斂速度[12]。對于訓練中某一個批量的數據{x1,x2,…,xP},該數據可以是輸入也可以是網絡中間某一層的輸出,數據批量歸一化操作如下:
(15)
(16)
(17)
式中:μ為數據均值;xj為數據個數P中第j個數據;σ2為數據方差;l為數據歸一化值;γ和θ為兩個需要網絡學習的參數;ε為人為給定的參數;l為歸一化后的最終輸出。
2.2 數據增強
針對CNN,良好的泛化能力比較高的訓練準確率更為重要。良好的泛化能力意味著CNN對訓練數據以外的數據同樣具有準確預測的能力[13]。提高CNN泛化能力的一個有效措施就是對訓練數據集進行數據增強,即人為創建假數據并添加至訓練集[14]。本文首先收集4種典型的城市以及非城市路面圖像,其次對部分路面圖像進行圖像處理,即調整圖像明暗度、將圖像沿橫向或垂向平移若干像素、對圖像進行小角度的翻轉和剪切,從而模擬外部自然環境以及采樣時車輛振動對圖像質量的影響,達到數據增強的目的。原始圖像以及進行圖像處理的圖像如圖13所示,圖像處理參數如表2所示。
3 仿真分析
3.1 半主動懸架控制流程
路面識別以及半主動懸架控制流程(見圖14)由路面圖像采集、路面類型識別、半主動懸架控制三部分組成。由圖14可見:首先,通過攝像頭采集路面圖像作為CNN的輸入;其次,通過預訓練完成的CNN對輸入圖像進行識別;最后,根據識別結果選擇已經過遺傳算法優化的半主動懸架控制參數,實現懸架控制參數在不同路面下自適應調整以提升車輛性能的目的。本文以4種路面進行仿真分析,對于普遍情況可通過增加數據集中路面類型的種類來拓寬CNN識別范圍。同時加載不同的路面激勵信號并結合優化算法獲取不同路面類型下懸架的最優控制參數。

圖14 基于路面識別的半主動懸架控制流程圖Fig.14 Flow chart of semi-active suspension control based on road recognition
3.2 卷積神經網絡訓練以及驗證
本文收集了1.3節中所述4種路面類型的圖像數據,即城市瀝青路、水泥路、砂石路以及彈石路。每種路面類型經過數據增強后分別有10 000個樣本,一共40 000個樣本。其中30 000個樣本組成訓練集用于CNN訓練,10 000個樣本組成驗證集用于驗證CNN訓練效果。訓練集與驗證集中每種路面圖像占樣本總個數的比例相同。同時每個樣本均通過MATLAB軟件處理為228×228×3的紅、綠、藍彩色圖像作為CNN的輸入,并采用監督學習的方式對卷積神經網絡進行訓練。
CNN網絡訓練中的卷積、池化、誤差BP更新權重等操作需要進行大量的矩陣運算,為了加快網絡的訓練速度,本文調用圖形處理器進行網絡訓練。用于網絡訓練的設備如表3所示,網絡參數設置如表4所示。
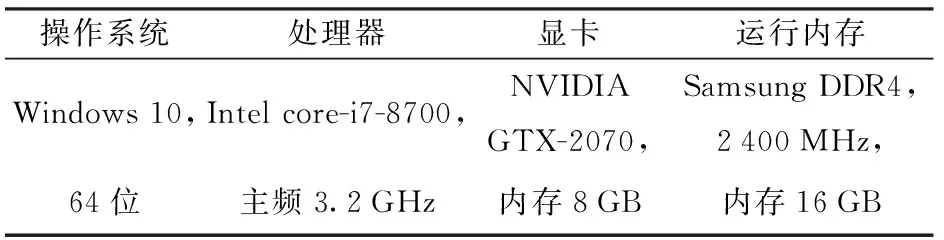
表3 網絡訓練所用硬件Tab.3 Hardware for network training
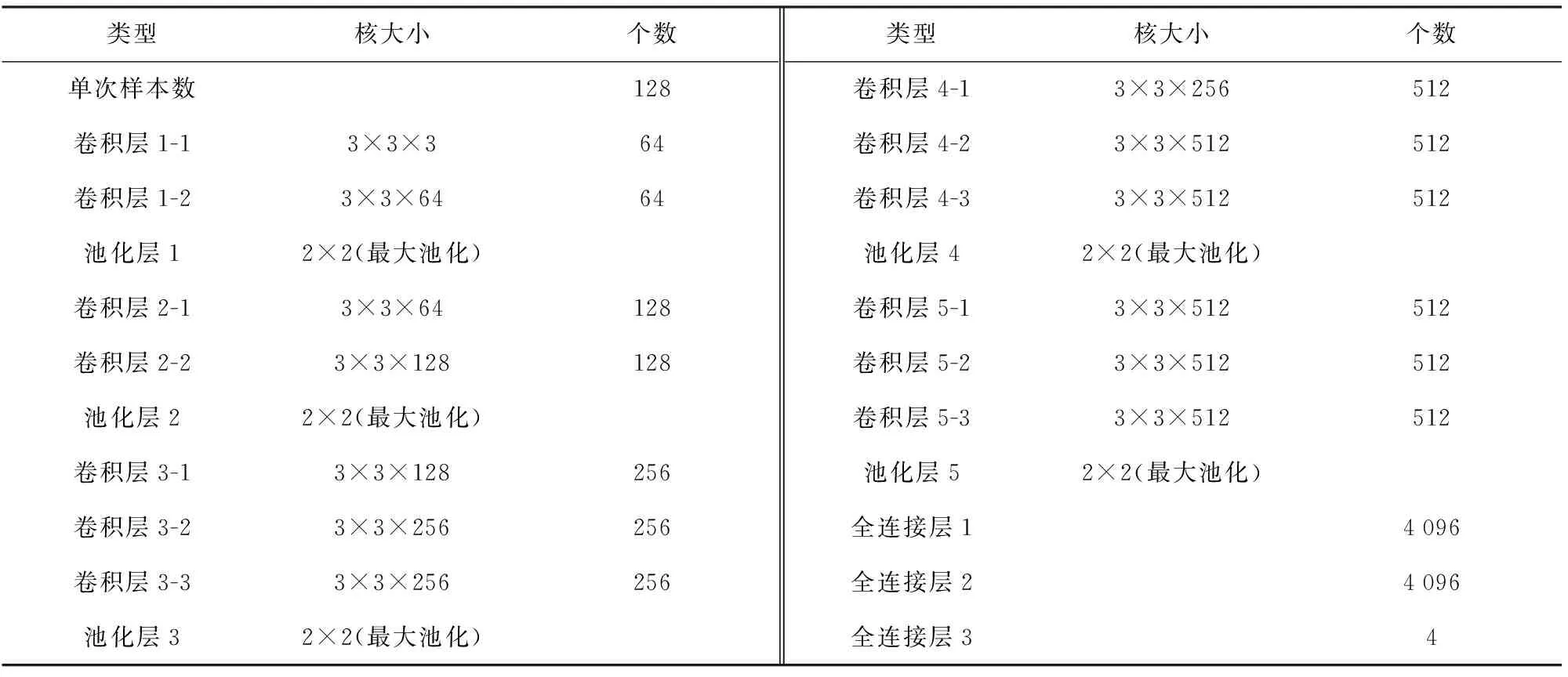
表4 卷積神經網絡參數Tab.4 Convolutional neural network parameters
CNN訓練以及驗證的準確率、損失函數值曲線如圖15所示。由圖15可知,訓練過程僅在200次迭代后就基本收斂,此時訓練集與驗證集的準確率曲線、損失函數值曲線走勢基本重合,數值上準確率接近于1,損失函數值接近0. 訓練完成后,通過編寫程序從包含10 000個樣本的驗證集中隨機選取18個樣本導入已訓練完成的卷積神經網絡中,18個樣本的識別結果如圖16所示。圖16中,每個子圖樣本下方給出了CNN識別的結果及其對應的概率。由圖16可知,訓練完成的CNN對本文采集的4種典型城市及非城市路面具有較好的識別以及泛化能力。同時通過添加計時程序可計算出:在所使用的硬件設備下(見表3),單張路面圖像的識別用時約為9.5 ms.
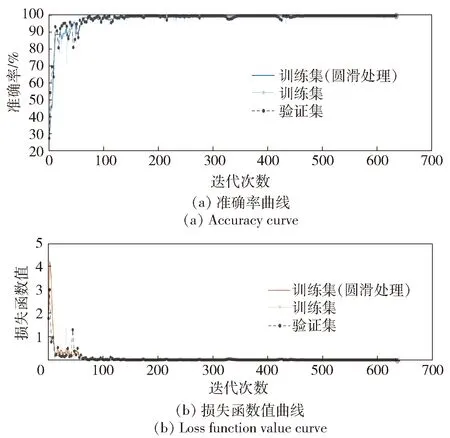
圖15 卷積神經網絡訓練及驗證結果Fig.15 Training and verified results of convolutional neural network
3.3 4種路面仿真結果
為保證車輛在不同類型的路面行駛時均具有良好的舒適性以及操縱穩定性,需對MR減振器針對不同的路面類型提供不同控制電流,以得到合適的阻尼特性。根據所建立的1/4車輛半主動懸架模型,以MR減振器控制電流為優化變量,以懸架動行程為約束條件,以簧載質量加速度、車輪動變形的均方根值為優化目標[15],針對不同的路面激勵求取MR減振器的最優控制電流。本文以某車型被動懸架參數作為參照,通過對優化目標賦予權重系數的方式,將多目標優化問題轉化為單目標優化問題,然后結合遺傳算法進行求解。所確定的目標函數如下:
(18)

圖16 隨機樣本測試結果Fig.16 Test results of random samples
遺傳算法參數設置如下:
1)使用精英操作,每代選擇20個優秀個體直接遺傳,不參與交叉與變異;
2)種群大小為200;
3)遺傳代數為50代;
4)交叉與變異概率分別設置為0.3、0.1;
5)控制電流搜尋范圍[0 A,2 A];
6)懸架最大動行程設置為12 cm.
路面激勵信號采用所采集的4種路面不平度時域信號。從車輛動力學的角度來看,車輛的舒適性與操縱穩定性是一對相互矛盾的指標[16],因此應根據具體路面來為目標函數分配不同的加權系數。當路面較差時,應著重優化與車輛操縱穩定性相關的指標。當路面良好時,應著重優化與車輛舒適性相關的指標。用于參照的被動懸架參數如表5所示,不同路面類型下目標函數加權系數取值以及優化后的控制電流如表6所示。
乘坐舒適性與操縱穩定性優化結果如圖17、表7所示。通過半主動懸架與被動懸架的對比可知:對于路面良好的瀝青路、水泥路而言,簧載質量加速
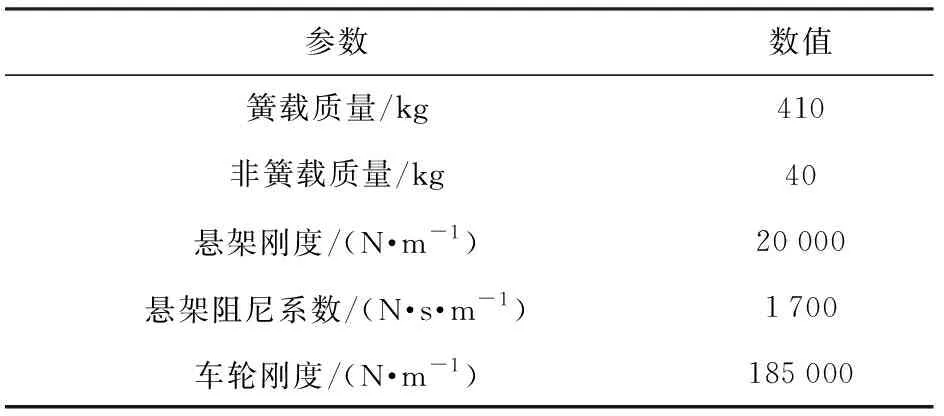
表5 被動懸架參數表Tab.5 Passive suspension parameters
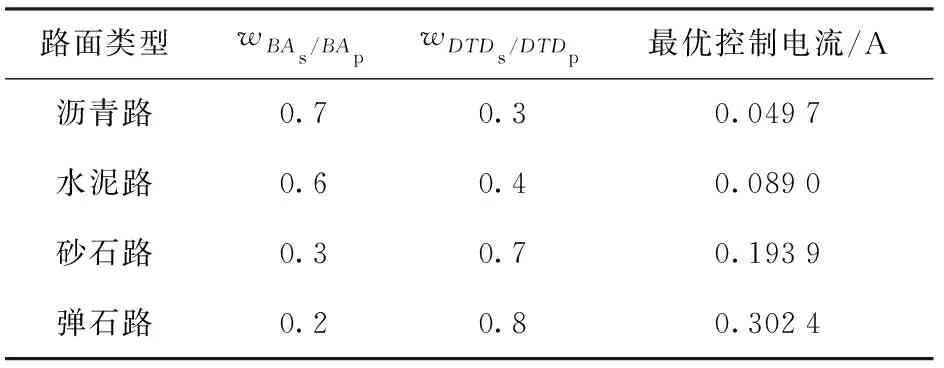
表6 4種路面加權系數及最優控制電流Tab.6 Weighting coefficients and optimal control current of four roads
度均方根值、車輪動變形均方根值均得到了有效改善;而對于路面較差的砂石路、彈石路,在有效降低車輪動變形的同時簧載質量加速度僅有小幅度的惡化。
4 結論
本文首先建立基于MR減振器的車輛1/4半主動懸架模型,其次通過搭建CNN基本結構并利用所采集的4種典型城市以及非城市路面圖像對網絡進行訓練和測試,并通過訓練完成的卷積神經網絡對路面類型進行識別。采用遺傳優化算法并以所采集的4種路面不平度時域信號作為路面激勵求取半主動懸架最優控制參數,根據路面識別結果及優化結果實現懸架控制參數的自適應調整。得出主要結論如下:
1)加入數據批量歸一化和數據增強操作,在提高網絡收斂速度的同時使得網絡具有良好的泛化能力。
2)基于卷積神經網絡的路面識別方法能對所采集的4種城市以及非城市道路進行準確識別。
3)基于路面識別和遺傳算法的半主動懸架控制系統,可根據不同路面類型自適應調整MR減振器控制電流,提升車輛在良好路面下舒適性的同時改善了在較差路面下的操縱穩定性。
在目前所做工作的基礎上,后續工作重點將放在增加路面圖像數據集樣本數量與種類,進一步擴展CNN的識別范圍,以及通過代碼硬件部署開展實車控制的相關研究工作。

圖17 不同路面類型下半主動與被動懸架性能指標對比Fig.17 Comparison of performance indexes of semi-active and passive suspensions under different road types

表7 乘坐舒適性與操縱穩定性對比Tab.7 Comparison of ride comfort and handling stability
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19