一階倒立擺平衡系統的控制方法研究
2020-09-27 23:02:21何思瑤韋雪樊雨琰楊佩
電腦知識與技術 2020年23期
何思瑤 韋雪 樊雨琰 楊佩
摘要:一階倒立擺平衡系統是一個不穩定的、多輸入多輸出的復雜非線性系統,一階倒立擺的控制方法有多種不同的類型,不管是在理論還是算法上,研究此類典型倒立擺被控對象都有很重要的意義。本文對一階倒立擺平衡控制系統中常用的PID控制方法進行了研究,并比較了PID算法參數整定中經驗湊試法、專家控制法、粒子群算法、遺傳算法等不同方法的特點和優劣,研究內容對工程設計具有一定的借鑒作用。
關鍵詞:一階倒立擺;平衡系統;控制方法;PID算法
中圖分類號:TP311? ? 文獻標識碼:A
文章編號:1009-3044(2020)23-0020-03
1 引言
平時常見的頭頂木樁雜技表演,需要雜技演員將一根長長的木樁頂在頭頂,并保持木樁豎直不倒,該雜技在實質上可認為是一個一階倒立擺平衡系統。其中,木樁是不穩定的非線性被控對象,完全可以通過一些數學上的控制算法令其保持豎直不倒的平衡狀態。這個雜技表演揭示出了自然界的一種基本規律,即當將頭頂木樁雜技表演歸納為一個一階倒立擺模型后,就可以通過數學方法同樣實現雜技的表演的平衡效果。
一個一階倒立擺平衡系統中包含兩個系統平衡位置,一個是倒立擺立起保持豎直不倒時的不穩定平衡位置,另一個是倒立擺未施加任何控制力,處于下垂而保持不動的穩定平衡位置。在對一階倒立擺進行平衡控制時,需要兩個階段,一個是施加控制力令倒立擺擺動起來以達到豎直平衡位置,另一個是在豎直位置施加控制力進一步地保持倒立擺平衡。目前,在這兩個控制階段的研究方面,已比較成熟,有很多相關論文可以查閱。這些成果基本均采用不同的控制策略和數學算法,實現對倒立擺兩個控制階段的穩定控制。
2 倒立擺介紹以及應用
從20世紀60年代起,倒立擺平衡系統的研究工作就已經開始了。一階倒立擺平衡系統是一個不穩定的、多輸入多輸出的復雜非線性系統,該系統可以為控制方面的理論教學及相關課程實驗提供一個理想且經典的研究驗證平臺,并通過該平臺建立的模型來驗證不同控制理論或算法的正確性和有效性,從而由倒立擺平衡系統的實例進一步在控制系統的非線性計算、穩定性分析、魯棒性衡量、跟蹤控制和隨動控制等方面的問題進行深入研究。
一階倒立擺平衡系統不但具有很好的理論研究價值,而且還具有重要的工程實用價值。對一階倒立擺平衡系統平衡控制的研究不但能夠解決控制領域中一些具有共性的理論問題和技術問題,還能夠進一步地推動數學算法、力學理論和計算機技術的融合,令這些學科在交叉中創新以解決控制中的實際問題。因此,無論在理論研究方面,還是在工程實用方面,一階倒立擺平衡系統都能夠提供一個十分有價值且經典的研究應用平臺,它對于學生實驗和研究人員教研具有較好的啟發作用,是檢驗不同控制理論與算法的理想實驗對象。對于控制方法在工程實際中的應用而言,一階倒立擺平衡系統同樣可以提供一個切實可行的驗證對象,通過將已有的各類控制理論方法應用于該對象,可以有效檢驗工程應用的可行性和正確性,從而實現理論與實踐的統一和相互驗證,降低工程應用驗證的復雜度和成本。目前,倒立擺平衡系統的各種相關研究已引發的國內外控制研究機構的廣泛關注,研究人員通過對倒立擺平衡系統進行平衡控制實驗,來實驗和檢測各種新型控制算法的控制穩定性和控制效率,并通過比較不同控制方法之間的優劣,找到適合工程實際的最佳控制方法,因此倒立擺平衡系統已是控制研究領域最為熱門的研究方向。
一階倒立擺平衡系統也常被用于控制實驗教學,它不但提供了可供實際操作的實踐教學平臺,也是將相關控制算法應用于實際的理論驗證平臺。在這個實踐平臺上,其實驗的對象——一階倒立擺是一個非線性、多變量、多擾動、強耦合的復雜不穩定系統。通過對這個系統進行深入研究,不但能夠實現和驗證已有經典控制理論的控制效果,還能夠在現有控制理論的基礎上進一步開發和創造新型控制理論和算法,以實現更高效和更穩定的控制效果,并將這些新的控制方法應用于諸如航天、鉆井平臺、機器人、無人控制等更復雜的實踐領域。自20個世紀九十年代以來,新的控制方法不斷出現,每年倒立擺控制相關方面的創新研究成果大量出現在理論研究刊物上,新型的控制設備也層出不窮,由此可見,倒立擺平衡系統無論對于控制理論研究,還是對于實際工程應用,都具有良好的研究價值,是一種理想的控制研究對象。
在工程實踐方面,倒立擺控制方法主要被應用于以下幾個領域。
(1)雙足仿人機器人的直立行走和平衡控制,類似于雙擺倒立擺平衡系統。仿人機器人雖然早在20世紀50年代就已經開始被研究,但其直立平衡行走和穩定運動的關鍵控制問題依然未能得到很好的解決。
(2)火箭在發射之后,必須保持直立向上的飛行姿態,這就需要使用類似于一階倒立擺平衡系統的實時控制方法,對其進行姿態控制,以保證火箭具有穩定準確的飛行方向和狀態。
(3)地球軌道上的通信衛星在近地軌道運行時,必須保持和地球具有固定的角度姿態,這也需要使用類似于一階倒立擺平衡系統的控制方法,持續實時調整衛星的運行姿態,從而令通信衛星始終保持指向地球的方向,以保證良好的通信效果。
(4)各類運動型攝像機在拍攝照片時,必須能夠克服拍攝設備在運動時的抖動,以保證清晰穩定的拍攝效果。為此也需要使用類似于一階倒立擺平衡系統的控制方法,來保持拍攝云臺姿態的穩定,有效消除攝像機的震顫和抖動,以在最大程度上提高運動攝像機拍攝圖像的質量。
由于對于上述實際領域相關的控制問題都可以利用一階倒立擺實驗平臺來進行模擬研究,因此一階倒立擺平衡控制系統在諸多工程應用和理論研究領域都具有重要的實際意義。
3 一階倒立擺平衡系統的物理模型
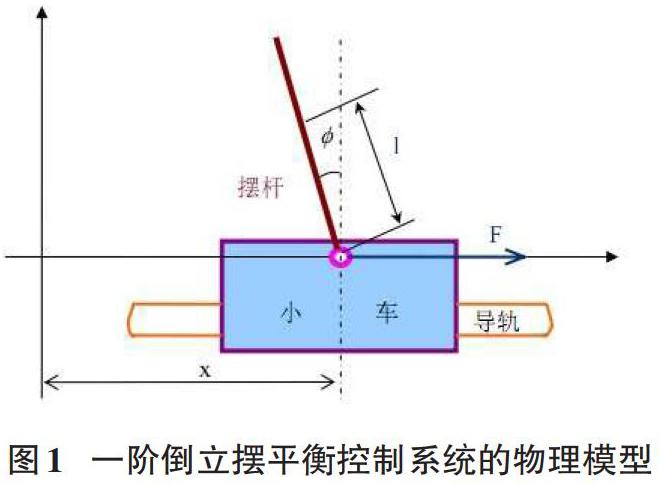
一個一階倒立擺平衡控制系統的物理模型如圖1所示。該模型由一個具有一定長度的平滑軌道、一個可在平滑軌道上往復運行的滑塊和一個與滑塊鉸接的具有一定長度的直桿組成,其中滑塊上的直桿可以實現豎直平面內360度的自由擺動。為了能夠讓滑塊上的直桿通過擺動達到最終豎直向上的平衡姿態效果,就需要給滑塊施加一個實時變化的驅動力F,以令滑塊能夠在該驅動力的控制作用下運動,以實現擺桿起擺,并保持豎直平衡的穩定控制效果。
在上述物理模型中,需要控制的物理量包括:直桿與豎直方向的夾角,滑塊在導軌上的運動距離,直桿與滑塊鏈接點的位置變化。
事實上,令直桿與豎直方向所成角度保持在一個較小范圍之內變化,是一階倒立擺保持擺桿穩定處于豎直狀態的前提條件。當直桿能夠保持豎直穩定狀態時,該夾角必須小于5度。
4 一階倒立擺平衡系統的控制方法
倒立擺的控制方法存在很多種類型。不管在工程上,還是在理論上,研究此類典型倒立擺被控對象都具有很重要的意義。當倒立擺系統的擺桿個數增加時,控制的難度也會成級數倍的增加。為了能夠控制更復雜的被控對象,實現多階倒立擺的穩定控制,就必須不斷改進已有控制方法,甚至發明創造新的理論方法來達到提高控制能力的目的。在這方面,多階倒立擺平衡控制模型可以提供驗證復雜控制方法有效性的實驗平臺,為復雜控制理論研究給出明確的前進方向。
目前,按照倒立擺控制方法的難易程度,可將他們分為以下兩種類型[1]。
(1)線性控制方法
倒立擺平衡系統是一個復雜的非線性系統,直接計算求解該非線性系統的難度比較大,故可以先將倒立擺原有的非線性物理模型簡化近似處理,使其在控制平衡點附近變為線性模型,然后再利用已有的各種處理線性模型的控制理論方法對其求解,從而得到滿意的控制結果。在線性控制方法中,PID控制方法、狀態反饋控制方法、能量控制方法和線性二次調節器方法都是常用的成熟控制方法。
(2)變結構控制方法和預測控制方法
變結構控制方法是一種非連續控制方法,該方法可將受控對象從任意位置上變化到滑動曲面上,并通過消除系統震顫的處理手段,來保證控制方法的穩定性和魯棒性。預測控制方法是一種優化控制方法,該方法的主要處理對象不是控制模型的自身結構,而是具體控制功能的優化實現。
上述控制方法雖然對于理想狀態下的復雜非線性系統具有較好的控制效果,但這些方法控制過程復雜,控制成本高且控制效率較低,故對于需要實時控制的快速變化實變系統而言,卻不是最佳選擇。
5 PID參數整定方法對比研究
PID控制方法是目前在工程實踐中被應用的最多的經典控制方法,該方法中的比例(P)、積分(I)和微分(D)三個參數的優化計算是整個控制過程中的關鍵問題,能否找到這三個參數合理的參數值將直接關系到最終控制效果的好壞。另外,控制器運行的穩定性、準確性和控制速度也與這三個參數有著密切的關系。
PID控制方法在20世紀50年代起就開始被應用,雖然之后各種類型的自動控制方法得到了較為廣泛和深入的研究,新的控制算法也不斷涌現出來,但PID方法卻因其較強的實用性和穩定性,始終是工程實際中被應用的最多和最廣泛的控制方法。PID控制方法在應用中的一大優勢是,其在使用時不需要建立被控對象精確的物理模型,僅需要調整好P、I、D三個參數值,就可以得到較為理想的控制效果[2]。下面將對幾種常用的PID參數整定方法進行對比研究。
(1)公式計算法
PID控制方法中的比例(P)、積分(I)和微分(D)三個參數與系統輸入和輸出之間的公式關系為:
當使用公式計算法時,需要先調節比例系數,讓系統輸出在某個比例系數的作用下產生周期性震蕩的結果,然后再按照當前震蕩周期和比例度與P、I、D三個參數之間的計算關系,得到最后的整定參數值。
(2)經驗試湊法
使用經驗試湊法時,需要先將P、I、D三個參數設定在某個經驗值上,然后給系統施加擾動并不斷改變P、I、D參數的設定值,通過記錄下被控量在不同情況下的變化過程曲線,可以最終確定出P、I、D參數的整定值。
經驗試湊法確定P、I、D參數的過程包含兩種不同的步驟順序:第一種以比例作用作為控制的基礎,在參數整定過程中需要先試湊比例度,當調節好的比例度能夠令輸出保持穩定震蕩之后,再加入積分系數調節環節,來消除控制系統中的靜差,如果控制效果仍不夠理想的話,最后再加入微分系數調節環節,以提高控制系統的最終實時控制效果。第二種以積分作用作為控制的基礎,在參數整定過程中需要先試湊積分時間,然后按照由大到小的方式不斷試湊與該積分時間匹配的比例度,以獲得符合要求的系統輸出變化結果。
(3)專家控制法
專家控制法利用包含著大量規律和經驗的專家系統來實現P、I、D參數的整定效果,該專家系統是一類包含著知識和推理的智能計算機程序,它能夠利用人們在工程實踐中獲得的大量寶貴經驗來提供P、I、D參數的整定值。
專家控制法通過已得到的控制規律和控制經驗,以智能化的方式將PID參數的整定過程與專家系統中的控制規律進行匹配,并最終根據專家經驗得到最佳或最符合當前實際情況的PID整定參數。專家系統的建立是一個長期的自主學習的過程,它具有仿人智能化控制的特征和功能。隨著工程經驗的增加和大數據技術的成熟,越來越豐富的專家經驗被添加到專家系統庫中,用該方法進行PID參數整定也越來越具有簡單實用的效果。需要說明的是,與任何專家計算系統的應用方式相同,專家控制法的應用過程也由知識庫、推理機、匹配識別和結果判定等部分組成。
(4)粒子群算法
1995年,Kennedy和Eberhart等人提出了一種新的數值演化算法——粒子群算法[3]。該方法通過模擬鳥群在覓食和遷徙過程中個體、群落和環境之間的關系,來得到最后的最佳計算結果。粒子群算法目前已被廣泛應用于優化算法、神經網絡算法、模糊控制算法中的學習訓練環節。它與大部分的演化算法相同,都要基于群體演化過程進行迭代計算,計算時單個粒子在解集空間內不斷迭代尋找最優值,使得所有參數或變量集體向著最優方向進行演化。
(5)遺傳算法
遺傳算法是一種優化計算方法,它由美國密歇根大學的J.Holland教授于1975年首次提出,該優化計算方法通過模擬自然界中染色體的選擇和進化過程來完成最優解的搜索任務。由于染色體的選擇和進化過程是以達爾文進化論中的自然選擇和遺傳學說作為理論基礎的,故這種優化算法被稱為遺傳算法[4]。
遺傳算法不需要進行優化梯度計算即可進行全局尋優,故它適用于各類復雜非線性優化問題的求解場合,并具有良好的適應性和魯棒性[5]。由于該算法全局尋優過程中花費的時間成本較高,故其主要缺點是優化效率較低,但隨著計算機存儲空間和計算速度的提高,該缺點已不再成為主要問題。
當使用遺傳算法進行PID參數整定時,基于遺傳算法的應用步驟,需要先將P、I、D三個參數變為算法中的染色體變量,并將控制目標設定為遺傳算法中相應的進化適應度,通過遺傳算法的全局尋優計算,最終可以得到最佳的控制參數整定值。由于遺傳算法不需要系統精確數學模型的梯度信息,只需根據遺傳規律進行進化尋優,故該方法非常適用于一階倒立擺這樣復雜非線性系統的PID參數整定過程。
6 結論
一階倒立擺的控制方法有很多種,不管在工程上,還是在理論上,研究此類典型倒立擺的控制方法都具有十分重要的意義。本文對常被用于一階倒立擺平衡控制系統中的PID控制方法進行了研究,并對其應用于一階倒立擺平衡系統時的各種參數整定方法進行了對比,本文研究內容對一階倒立擺平衡系統的研制具有較好的工程指導作用。
參考文獻:
[1] 薛安客, 王俊宏. 倒立擺控制仿真與實驗研究現狀[J]. 杭州電子工業學院學學報, 2002, 21(6): 25-27.
[2] 蔣尉孫, 俞金壽. 過程與控制[M]. 北京: 北京化學工業出版社, 1992.
[3] 王介生, 王金城, 王偉. 基于粒子群算法的PID控制器參數自整定[J]. 控制與決策, 2005, 20(1): 73-76, 81.
[4] 徐征. 基于遺傳算法的PID控制器參數尋優方法的研究[D]. 武漢: 武漢大學, 2004.
[5] 金傳偉.基于遺傳算法的PID參數優化與仿真[J].微計算機信息,2002,18(7):72-73.
【通聯編輯:梁書】
