深水海管提管架裝置研究
2020-09-23 08:44:54柳宇李晶曲有杰林守強李剛
機械工程師 2020年9期
關鍵詞:結構
柳宇, 李晶, 曲有杰, 林守強, 李剛
(深圳海油工程水下技術有限公司,廣東深圳518067)
0 引 言
隨著我國逐漸進入深水海底油氣田開發,國內深水海底管線將逐漸增多,深水海管水下濕式應急維修潛在需求將越來越大。
目前海管水下濕式維修時需在海管與海床間制作出一合適的工作區,以便后續開展海管相關維修工作(如安裝堵漏管卡或進行破損管段更換),為創造出海管水下維修合適工作區,通常采用吹坑法和提管法[1-2]等2種方法。吹坑法由潛水員或水下機器人(ROV)利用吸泥泵在海管漏點周邊海床上進行局部吹坑,以便后續安裝海管堵漏管卡需要。提管法是利用提管架將海管從海床上提起至一定高度,以便開展后續海管水下維修工作。在淺水區海管維修時,可用一簡易H架作為提管架并在其上配備吊點和手拉葫蘆,由潛水員將手拉葫蘆和海管連接,通過操縱手拉葫蘆將海管從海床上提起至一定高度后進行后續海管水下維修工作。但在深水海管維修中,潛水員配備簡易H架無法勝任此項工作,需由水下機器人配備特殊提管架來完成全部過程[3-4]。海管維修提管架設備作為深水海管維修的關鍵裝備,深水海管維修提管架裝備的研究對保障我國深水海管安全運營起著至關重要的作用。
1 國外深水海管提管架的現狀
深水海管提管架通常由底座、支腿、橫梁結構、卡爪結構、防沉板等組成,根據提管架與防沉板在設計時是否相互獨立安裝,可將提管架分為集成式和獨立式,根據提管架提升液壓缸設置位置,可將提管架分為支腿提升式和橫梁提升式。目前Oceaneering、Stateoil、Oil States等公司在深水海管提管架設計、制造及應用方面較有經驗,其提管架產品如圖1所示,表1列出了其提管架參數及形式分類。

圖1 Oceaneering、Stateoil和Oil States公司提管架
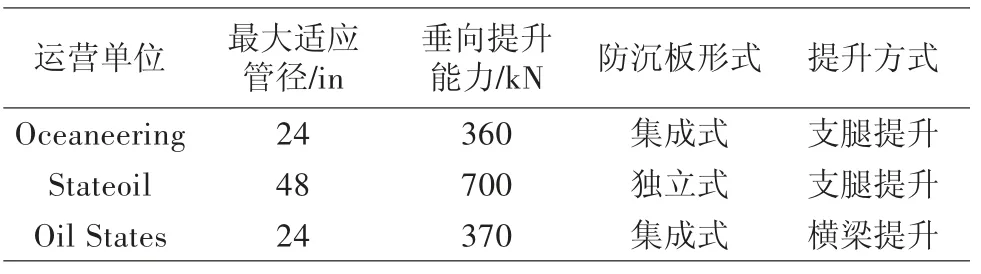
表1 海管提管架參數及形式分類
2 深水海管提管架結構組成
本文所涉及的深水海管提管架裝置如圖2所示,該提管架能滿足最大作業水深達2000 m,適用管徑6~30 in,海管垂向提升高度-1.5~2.0 m,垂向提升拉力達500 kN,可將埋設于海床面以下的海管從埋坑中提起。其采用支腿提升式設計,且設計與防沉板相互獨立安裝,可減輕提管架自重和底面積,有利于海上施工時提管架的收放。該提管架由支腿結構、橫梁結構、ROV控制面板和卡爪結構組成。ROV控制面板為ROV閥門及液壓插頭的集成面板,以下重點介紹支腿結構、橫梁結構和卡爪結構。
2.1 支腿結構組成
支腿結構如圖3所示。
1)支腿底座。作為裝置的承重結構,承載整個裝置和所提海管的重力。
2)支腿。作為垂向固定結構,垂向液壓缸及液壓缸在其上進行固定,允許橫梁結構通過滑車在支腿上移動。
3)滑車。可帶動橫梁結構在支腿的滑軌上進行上下移動。
4)滑靴。將滑車壓緊使其緊貼在支腿的滑軌上。
5)滑軌。作為支腿的軌道,允許滑車和滑靴在其上移動。
6) 垂向液壓桿。兩側固定在支腿上,允許垂向液壓缸在其上移動。
7)垂向位置探測器。監控垂向液壓缸在垂向位置的行走距離。
8)萬向連接結。將橫梁固定板、支腿垂向液壓缸及支腿滑車固定在一起。
9)垂向液壓缸。在左右支腿上各配備兩個垂向液壓缸,可在液壓驅動下在支腿垂向液壓桿上移動。
10)液壓桿保護罩。保護液壓桿上部結構。
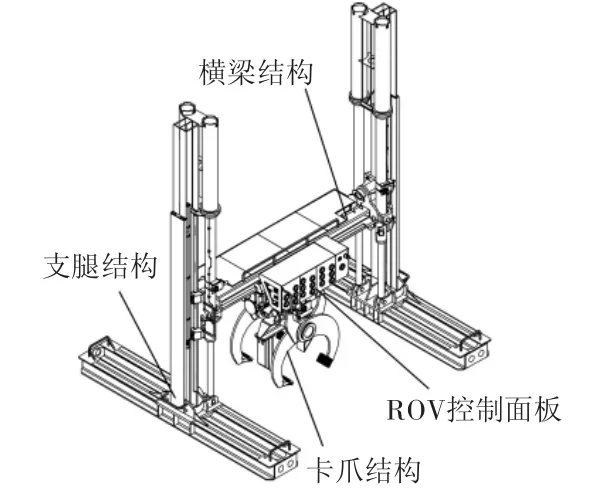
圖2 海管提管架主要結構
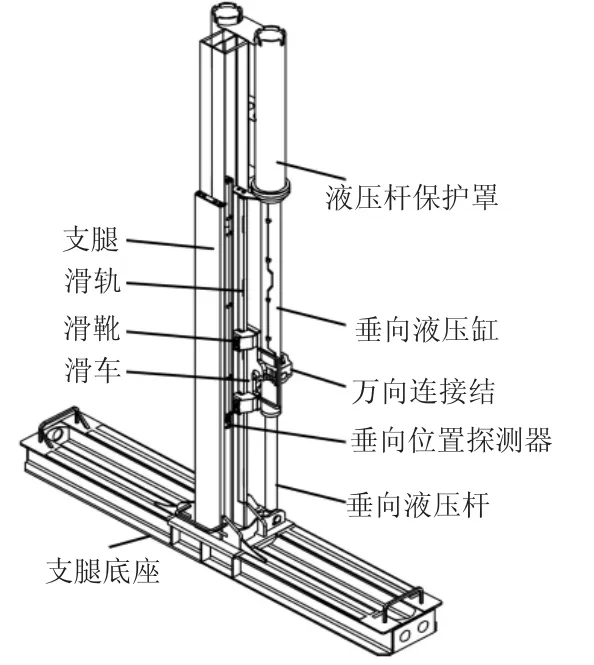
圖3 海管提管架支腿結構組成
2.2 橫梁結構
橫梁結構如圖4所示。
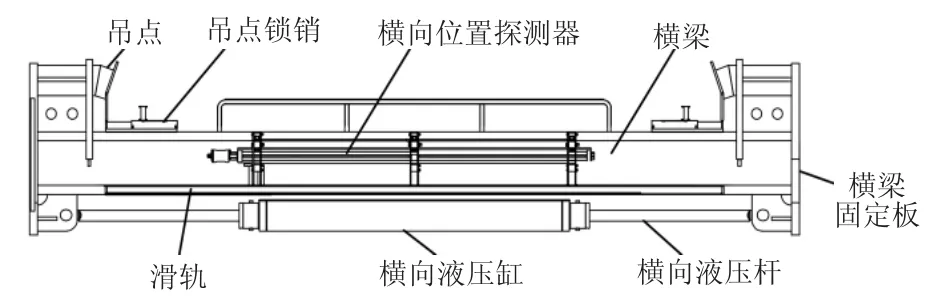
圖4 海管提管架橫梁結構組成
1)橫梁。作為橫梁結構的支撐結構,承載卡爪結構和所提海管的重力。
2)滑軌。作為橫梁的軌道,允許卡爪機構的滑車和滑靴在其上移動。
3)橫梁固定板。與支腿結構的萬向連接結,將橫梁結構固定在支腿垂向液壓缸上。
4)橫向液壓桿。兩側固定在橫梁上,允許橫向液壓缸在其上移動。
5)橫向液壓缸。可通過提供液壓,使其在橫梁橫向液壓桿上移動。
6)吊點。作為整個裝置的吊索具吊點。
7)吊點鎖銷。可由ROV操作進行開合,以便將吊索具在吊點上鎖住/釋放。
8)橫向位置探測器。監控橫向液壓缸在橫向位置的行走距離。
2.3 卡爪結構
卡爪結構如圖5所示。
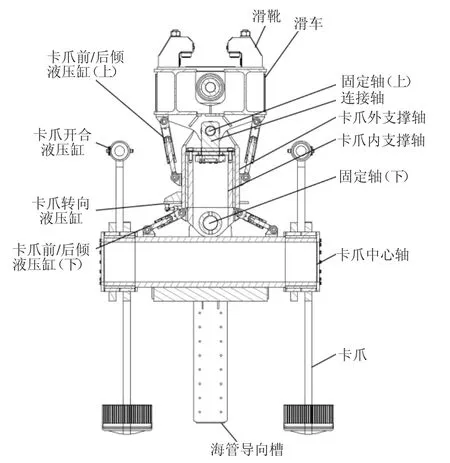
圖5 海管提管架卡爪結構組成
1)卡爪。通過卡爪開合液壓缸可進行開合,從而將海管抱緊/釋放。
2)卡爪中心軸。作為卡爪和海管導向槽的支撐結構,允許卡爪繞其進行開合。
3)固定軸(上/下)。允許卡爪中心軸在卡爪前/后傾液壓缸(上/下)帶動下,繞其進行轉動。
4)卡爪內支撐軸。可繞固定軸(下)做一定程度的擺動,同時也可繞連接軸做一定程度的轉動。
5)卡爪外支撐軸。可繞固定軸(上)做一定程度的擺動。
6)連接軸。可繞固定軸(上)做一定程度的擺動。
7)滑車。固定在橫向液壓缸,可帶動卡爪結構在橫梁的滑軌上進行左右移動。
8)滑靴。可將滑車壓緊使其緊貼在橫梁的滑軌上。
9)卡爪前/后傾液壓缸(上/下)。可在液壓驅動下,調整卡爪與海管間的相對傾角。
10)卡爪開合液壓缸。可在液壓驅動下,帶動卡爪做開合運動,進而達到將海管抱緊/釋放的目的。
11)卡爪轉向液壓缸。可在液壓驅動下,調整卡爪與海管軸向相對角度。
12)海管導向槽。可引導海管進入卡爪。
3 深水海管提管架液壓控制系統分析
根據上節深水海管提管架結構組成分析可知,提管架在進行提管操作時卡爪會涉及以下4種運動:垂向上下移動,橫向左右移動,繞海管轉動,沿海管前/后傾運動。因此在進行提管架液壓系統設計時,需實現上述4種功能。圖6為提管架的液壓控制系統設計,其中包括以下3種模式:正常工作模式,備用工作模式和應急回收模式。
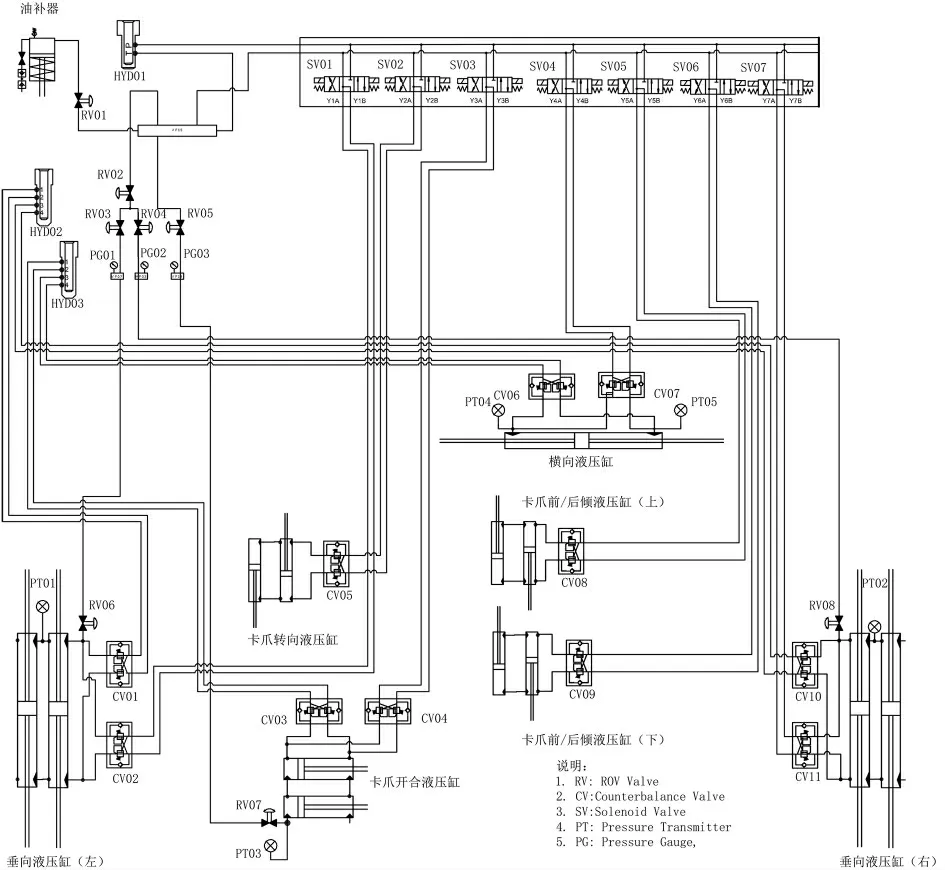
圖6 海管提管架液壓控制系統
3.1 正常工作模式
此模式為首選工作模式,啟用此模式時需關閉液壓系統上其他ROV閥門RV01~RV08,ROV將液壓接頭插入PLF上液壓接口HYD01(兩孔),通過電磁閥(solenoid valve, SV)SV01-07,分別控制垂向液壓缸(左)、卡爪轉向液壓缸、卡爪開合液壓缸、橫向液壓缸、卡爪前/后傾液壓缸(上)、卡爪前/后傾液壓缸(下)、垂向液壓缸(右),并通過壓力傳感器(pressure transmitter, PT)PT01-05分別對垂向液壓缸(左)、垂向液壓缸(右)、卡爪開合液壓缸、橫向液壓缸(左)、橫向液壓缸(右)內的壓力進行監控,來完成相關作業。
3.2 備用工作模式
此模式為提管架正常工作模式失效(如SV01-07電磁閥失效)后的選擇,該模式只能控制垂向液壓缸(左)、垂向液壓缸(右)、卡爪開合液壓缸、橫向液壓缸,但在大多數情況下,通過對上述4個液壓缸控制就能確保提管架在水下完成相關作業。啟用此模式時,首選需退出正常工作模式,ROV將兩孔液壓接頭從液壓接口HYD01上拔下,在HYD02和HYD03液壓接口上分別插入四孔液壓接頭來啟動備用工作模式。
3.3 應急回收模式
此模式為正常工作模式和備用工作模式均失效的情況下應急釋放海管進行提管架回收時使用,此情況下需首先將海管下放至海床,然后打開卡爪,過程涉及到垂向液壓缸(左)、垂向液壓缸(右)和卡爪開合液壓缸。通過操作RV01、RV02、RV03、RV04、RV06、RV08閥門開合,平衡上述液壓缸內外壓力,將海管從提管架卡爪中釋放。
4 深水海管提管架工作流程
4.1 準備階段
在下放深水海管維修提管架裝置至海管就位之前,啟動橫梁的橫向液壓缸,將卡爪位置調至橫梁中心位置;啟動支腿的垂向液壓缸,將橫梁調至支腿最頂端位置;啟動卡爪開合液壓缸,將卡爪完全打開;啟動卡爪轉向液壓缸,將卡爪旋轉至卡爪軸線與橫梁成垂直位置;啟動卡爪前/后傾液壓缸(上)和卡爪前/后傾液壓缸(下),使卡爪相對支腿底座無任何前/后傾;吊機將吊索具分別裝在橫梁的吊點上。此時提管架的初始狀態設置完畢。
4.2 實施階段
下放提管架至海底,ROV協助提管架在海管上進行就位;待提管架就位成功后,ROV協助吊機拆除提管架吊索具;啟動橫梁的橫向液壓缸,將卡爪位置移至海管正上方;啟動卡爪轉向液壓缸,將卡爪旋轉至卡爪軸線與海管軸線成同一朝向;啟動卡爪前/后傾液壓缸(上)和卡爪前/后傾液壓缸(下),使卡爪相對海管無傾角;啟動支腿的垂向液壓缸,將卡爪下放直至海管進入海管導向槽,且海管能夠被卡爪完全包裹;啟動卡爪開合液壓缸,將海管抱入卡爪中;確認抱管成功后,啟動支腿的垂向液壓缸,將橫梁、卡爪和海管一起從海床上提起,直至提起高度達到海管維修設計高度。
4.3 回收階段
待海管完成維修后,啟動支腿的垂向液壓缸,將橫梁、卡爪和海管一起緩慢下放至海床上;啟動卡爪開合液壓缸,將卡爪完全打開;確認海管于海床上就位后,重復準備階段步驟,將提管架恢復成初始狀態位置,之后下放吊機回收提管架。
5 結 語
本文對深水海管提管架裝置的結構組成、液壓控制系統及工作流程進行分析,得出以下結論:1)提管架支腿結構、橫梁結構和卡爪結構作為提管架核心功能結構,在設計時需重點考慮。2)提管架液壓系統設計,除考慮正常的工作模式外,還需兼顧備用工作模式和應急回收模式。3)提管架在進行工作時,需將卡爪的橫向、豎向、軸向及前后傾4個方位與海管方位調整成一致后,才能進行抱管和提管作業。
提管架是深水海管應急維修系統的主要設備,可用于深水海管、基盤、管匯、管線終端回接或維修,目前我國在深水海管提管架研究仍為空白,因此研究提管架對我國深水油氣管道安全保障具有重要意義。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
