基于環(huán)境點(diǎn)云的礦用挖掘機(jī)器人自主作業(yè)規(guī)劃
2020-09-23 08:45:14喬建強(qiáng)王鑫李光張永明宋學(xué)官
機(jī)械工程師 2020年9期
喬建強(qiáng), 王鑫, 李光, 張永明, 宋學(xué)官
(1.太原重工股份有限公司 礦山采掘裝備及智能制造國家重點(diǎn)實(shí)驗(yàn)室,太原030024;2.大連理工大學(xué) 機(jī)械工程學(xué)院,遼寧 大連116024)
0 引 言
近年來,為滿足露天礦山煤炭等資源的高效開采需求,采裝設(shè)備大型化、自主化已成為必然趨勢。礦用挖掘機(jī)是露天采掘系統(tǒng)中的核心裝備,但是傳統(tǒng)挖掘機(jī)由于機(jī)器本身和復(fù)雜的地形條件使得最佳挖掘軌跡規(guī)劃相當(dāng)困難,進(jìn)而增加挖掘機(jī)自主化作業(yè)的研究難度。根據(jù)楊華勇院士總結(jié)的工程裝備智能化4個層次,已有研究大都屬于第1個(傳感器輔助的自動控制)層次,缺乏對挖掘等單一環(huán)節(jié)的完全自主作業(yè)研究[1]。因此,有必要針對挖掘機(jī)自主規(guī)劃、連續(xù)高效的挖掘環(huán)節(jié)進(jìn)行研究,其中的關(guān)鍵就是要解決針對復(fù)雜礦巖環(huán)境的挖掘機(jī)完全自主規(guī)劃的挖掘問題。
復(fù)雜礦巖環(huán)境的感知是制約礦山采掘作業(yè)智能化的重要因素,直接影響著礦山采掘的自動化水平。張申等[2]提出礦山環(huán)境的感知問題是數(shù)字化礦山和礦山自動化的關(guān)鍵所在。吳婕萍等[3]研究了礦山煤炭界面的非接觸式和接觸式的技術(shù)發(fā)展,強(qiáng)調(diào)了煤炭界面的自動識別技術(shù)對煤炭采掘的重要性。然而,自動化的礦山開采并不是簡單地從感知識別等方面通過周圍環(huán)境構(gòu)建物聯(lián)網(wǎng)模型,還需要對礦用挖掘機(jī)自主挖掘過程的挖掘軌跡進(jìn)行研究。Tiwari等[4]根據(jù)分析常規(guī)挖掘中的鏟斗軌跡并建立軌跡跟蹤系統(tǒng),同時采用多攝像頭立體視覺對三維軌跡坐標(biāo)進(jìn)行評估,但并未根據(jù)實(shí)時的環(huán)境進(jìn)行挖掘分析。Wei B等[5]以簡化了的3自由度挖掘機(jī)構(gòu)的電鏟為例,建立了以最小能耗和挖掘機(jī)構(gòu)的最佳尺寸參數(shù)為目標(biāo)的軌跡優(yōu)化模型,僅從理論上對軌跡的優(yōu)化模型進(jìn)行分析。Wang X等[6]通過建立挖掘過程的動力學(xué)模型以最小能耗為目標(biāo)建立軌跡規(guī)劃方法,通過數(shù)值仿真結(jié)果證明其方法的可行性,缺乏實(shí)驗(yàn)驗(yàn)證。已有研究大都單純分析礦山環(huán)境感知和識別的重要性或者從工作裝置和挖掘能耗考慮來離線規(guī)劃鏟斗的軌跡,并未針對復(fù)雜的礦巖環(huán)境來考慮挖掘軌跡,很難滿足礦用挖掘機(jī)智能化的在線規(guī)劃需求。
針對上述存在的問題,基于激光雷達(dá)的點(diǎn)云信息構(gòu)建挖掘環(huán)境的形貌模型,在考慮復(fù)雜物料堆面的動態(tài)挖掘體積的同時,以最小單位體積能耗為目標(biāo),然后利用多項(xiàng)式插值法在線規(guī)劃鏟斗的挖掘軌跡,實(shí)現(xiàn)挖掘機(jī)器人的自主作業(yè)規(guī)劃過程。
1 挖掘機(jī)器人模型
挖掘機(jī)器人是在WK-55型號挖掘機(jī)基礎(chǔ)上以1:20的比例改造設(shè)計(jì)的,其上安裝有智能化的操作系統(tǒng),包括感知、決策和控制等方面,以實(shí)現(xiàn)傳統(tǒng)機(jī)器的挖掘、回轉(zhuǎn)和卸料裝載等過程的自動化操作,如圖1所示。
自主化的作業(yè)規(guī)劃過程主要是通過激光雷達(dá)對物料環(huán)境的掃描識別建立基于點(diǎn)云的挖掘環(huán)境模型,并將堆面和距離信息傳輸給決策系統(tǒng),通過軌跡的規(guī)劃模型進(jìn)行優(yōu)化計(jì)算,將規(guī)劃的最優(yōu)挖掘參數(shù)由決策系統(tǒng)下發(fā)命令到底層控制系統(tǒng)執(zhí)行,完成單個循環(huán)作業(yè)的自主挖掘過程,如圖2所示。
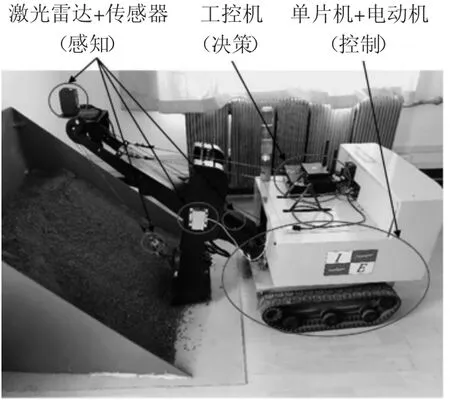
圖1 智能挖掘機(jī)器人模型

圖2 自主化的作業(yè)規(guī)劃過程
2 基于雷達(dá)點(diǎn)云的挖掘環(huán)境建模
為實(shí)現(xiàn)復(fù)雜挖掘環(huán)境的實(shí)時建模,需將雷達(dá)獲得的不同堆面的點(diǎn)云信息進(jìn)行特征處理,根據(jù)點(diǎn)云不同的形狀特征分辨出挖掘環(huán)境模型,然后進(jìn)行處理,以適應(yīng)自主化挖掘作業(yè)需求。
圖3所示為挖掘機(jī)器人基于物料點(diǎn)云的挖掘環(huán)境模型,以雷達(dá)掃描中心為原點(diǎn)O建立坐標(biāo)系,點(diǎn)O1和P1分別為物料的兩端點(diǎn), 其中雷達(dá)的激光照射在堆料面時返回的距離值為Z1,Z2,…,Z660,然后經(jīng)過投影關(guān)系得到物料表面的高度值Y1,Y2,…,Y660。設(shè)置高度閾值H和距離閾值D對X和Z方向的點(diǎn)云進(jìn)行選擇,篩選掉高于高度H或者大于距離D、小于距離d的墻面及地面的點(diǎn)云信息,僅保存有效的物料信息的點(diǎn)云矩陣A(m, n)。然后根據(jù)鏟斗的寬度對物料表面的有效點(diǎn)云進(jìn)行切片處理,同時再次對雷達(dá)掃描出的數(shù)據(jù)點(diǎn)進(jìn)行篩選,為簡化計(jì)算過程和節(jié)省計(jì)算時間,保留組成矩陣(15,8)的120個有效點(diǎn)云數(shù)據(jù)。

圖3 基于點(diǎn)云的挖掘環(huán)境模型
圖4所示分別為不同物料環(huán)境的點(diǎn)云分布情況。根據(jù)最終保留的堆面點(diǎn)集數(shù)據(jù),計(jì)算出機(jī)器人到物料的距離和初始點(diǎn)的位置為后續(xù)規(guī)劃做準(zhǔn)備,上述基于雷達(dá)點(diǎn)云的挖掘環(huán)境建模的處理過程如圖5所示。
假設(shè)物料起始點(diǎn)O1與終點(diǎn)P1的空間坐標(biāo)值及物料起始點(diǎn)O1相對于雷達(dá)中心點(diǎn)O的水平距離為d1已知,則智能化挖掘過程之前挖掘機(jī)器人需行駛的距離為

圖4 不同堆面的雷達(dá)點(diǎn)云分布
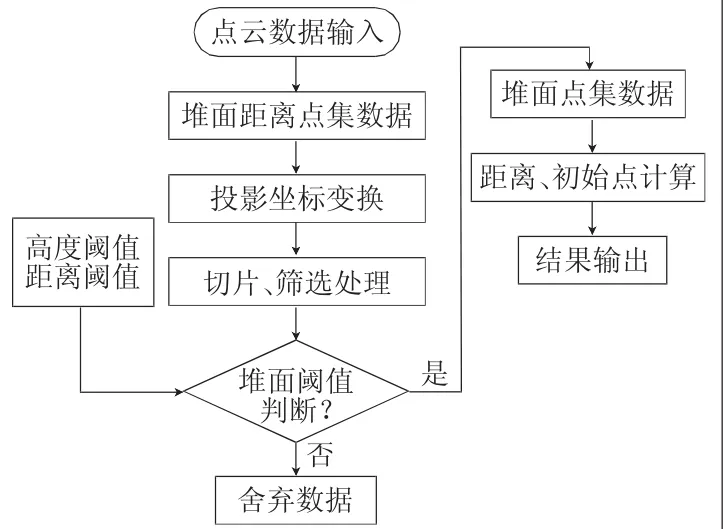
圖5 激光雷達(dá)數(shù)據(jù)的處理流程

3 挖掘軌跡的自主規(guī)劃
3.1 設(shè)計(jì)變量確定
挖掘工作時鏟斗的挖掘過程一般是從挖掘起始點(diǎn)到終點(diǎn)的位置變化,針對鏟斗點(diǎn)到點(diǎn)的運(yùn)動軌跡和考慮其速度及加速度等因素的變化情況,可以利用N階多項(xiàng)式的插值算法規(guī)劃其運(yùn)動軌跡。為保證合理擬合挖掘軌跡的同時減少規(guī)劃時的計(jì)算量,特選用6階多項(xiàng)式且最高項(xiàng)系數(shù)不為零:

針對多項(xiàng)式的挖掘軌跡在水平和豎直2個方向的運(yùn)動狀態(tài),在已知初始點(diǎn)和終點(diǎn)位置時的多項(xiàng)式軌跡中只有2個高階未知系數(shù)待定,只要確定了多項(xiàng)式的系數(shù),就確定了鏟斗挖掘時的齒尖運(yùn)動軌跡。因此,確定了挖掘過程的初始和最終位置后,最終待優(yōu)化的挖掘軌跡中的設(shè)計(jì)變量為x=[ax6,ay6]。
3.2 目標(biāo)函數(shù)確定
挖掘能耗是判定機(jī)器人挖掘作業(yè)性能的關(guān)鍵性指標(biāo),主要是提升機(jī)構(gòu)的提拉繩和推壓機(jī)構(gòu)的推壓桿共同作用的鏟斗的挖掘作業(yè)。為保證機(jī)器人挖掘作業(yè)的高效節(jié)能,將挖掘過程中挖掘單位體積物料的能量消耗定為目標(biāo)函數(shù),且能量消耗最小的表達(dá)式為:

式中:E為挖掘過程總的能量消耗;V為鏟斗挖掘的物料體積;Wr為提升電動機(jī)的能耗;Wc為推壓電動機(jī)的能耗。
3.3 規(guī)劃結(jié)果
采用序列二次規(guī)劃方法(Sequence Quadratic Program, SQP)求解滿足滿斗率約束條件的非線性優(yōu)化問題,實(shí)現(xiàn)沿給定多項(xiàng)式曲線方程運(yùn)動的電鏟機(jī)器人挖掘軌跡的規(guī)劃作業(yè),在在線實(shí)時規(guī)劃方面比其他算法具有更好的收斂性和較高的計(jì)算精度,適用于電鏟的智能化規(guī)劃研究。針對不同堆面的優(yōu)化結(jié)果如圖6~圖9所示。

圖6 典型堆面的挖掘規(guī)劃
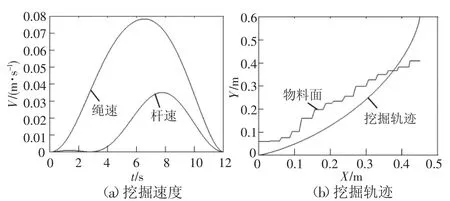
圖7 凹物料面的挖掘規(guī)劃
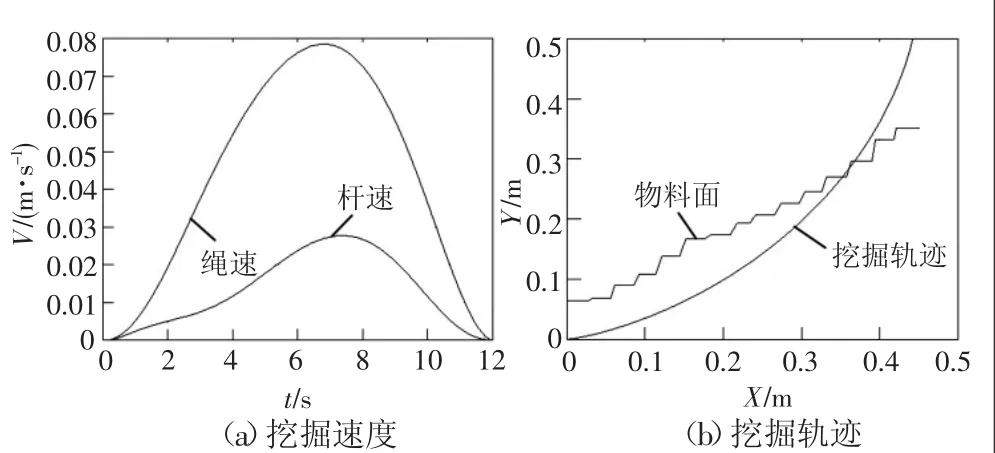
圖8 凸物料面的挖掘規(guī)劃

圖9 近似典型面的挖掘規(guī)劃
從圖6~圖9中可以看出,挖掘機(jī)器人在面臨不同物料環(huán)境時能夠?qū)崿F(xiàn)自主的作業(yè)軌跡規(guī)劃,且規(guī)劃的結(jié)果具有較高的適應(yīng)性。為確保合適的裝載體積,在面臨凹面物料時,推壓桿的速度相對較低,以保證推壓桿的變化量適應(yīng)凹面的挖掘作業(yè),最后的挖掘軌跡則相對往后,相反凸面料堆的最終挖掘軌跡則相對靠前,如圖7和圖8所示。圖6和圖9說明了近似典型堆面的挖掘結(jié)果與典型物料面挖掘情況較為接近。因此,面對復(fù)雜堆面時挖掘機(jī)器人能夠根據(jù)環(huán)境點(diǎn)云信息自主調(diào)整并作出最優(yōu)的規(guī)劃結(jié)果。
由表1中列出的不同類型復(fù)雜堆面的優(yōu)化結(jié)果可以看出,總體的軌跡規(guī)劃所用的時間均小于5 s,而且鏟斗挖掘的物料體積均達(dá)到了額定的滿斗率(8.00×10-3m3)要求,能滿足挖掘機(jī)器人自主化作業(yè)的在線規(guī)劃需求。
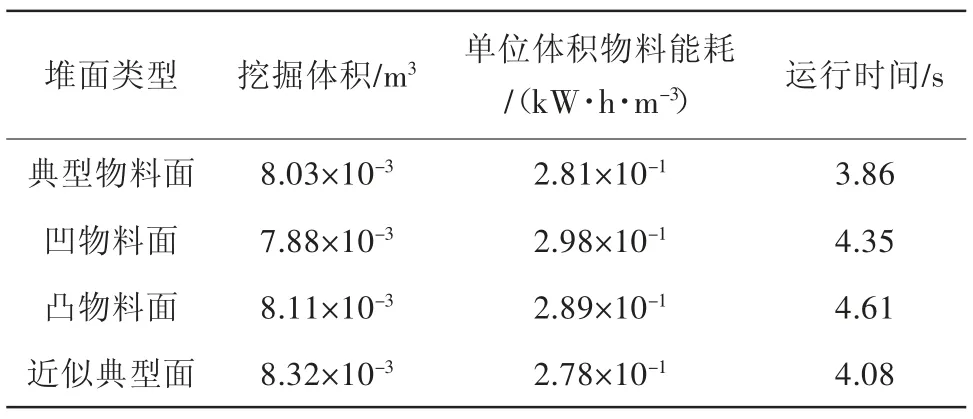
表1 不同復(fù)雜堆面的優(yōu)化結(jié)果
4 結(jié) 論
針對挖掘機(jī)器人復(fù)雜多變的作業(yè)環(huán)境,提出一種基于雷達(dá)點(diǎn)云信息的自主作業(yè)規(guī)劃方法。該方法通過建立挖掘環(huán)境模型對激光雷達(dá)掃描工作環(huán)境的點(diǎn)云數(shù)據(jù)進(jìn)行分析,對比了挖掘機(jī)器人與料堆在不同位置時的物料點(diǎn)云特征,并且通過距離和高度閾值篩選出挖掘匹配范圍的點(diǎn)云數(shù)據(jù),然后根據(jù)實(shí)際堆面的點(diǎn)云數(shù)據(jù)采用6階多項(xiàng)式進(jìn)行挖掘軌跡的作業(yè)規(guī)劃。規(guī)劃結(jié)果顯示,該方法針對各類型堆面的挖掘軌跡求解過程能夠在保證合適的挖掘能耗和滿斗率的要求下具有較高的計(jì)算效率,規(guī)劃時間均小于5 s。自主規(guī)劃的自動挖掘作業(yè)能夠滿足連續(xù)、高效的開采作業(yè)需求。
猜你喜歡
河北地質(zhì)(2021年2期)2021-08-21 02:43:50
神劍(2021年3期)2021-08-14 02:30:08
昆鋼科技(2021年2期)2021-07-22 07:47:06
礦產(chǎn)勘查(2020年7期)2020-12-25 02:43:42
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
故事大王(2016年7期)2016-09-22 17:30:08
中國工程咨詢(2016年4期)2016-02-14 07:28:28
