基于魯棒H∞控制的多機(jī)協(xié)同編隊(duì)
2020-09-23 02:04:20于均杰
導(dǎo)航定位與授時(shí) 2020年5期
王 平,羅 陽,于均杰
(海鷹航空通用裝備有限責(zé)任公司,北京 100074)
0 引言
近年來,多無人機(jī)系統(tǒng)的協(xié)同編隊(duì)控制問題受到廣泛關(guān)注。多機(jī)協(xié)同能夠充分發(fā)揮單機(jī)的功能、提高任務(wù)的完成率、拓寬使用范圍等[1],在民生和軍事等領(lǐng)域均具有巨大的應(yīng)用潛力。編隊(duì)保持作為協(xié)同編隊(duì)控制方面的基本問題,是編隊(duì)有效執(zhí)行任務(wù)的基本保障。在協(xié)同偵察和協(xié)同定位等任務(wù)中,由于載荷特性對無人機(jī)編隊(duì)保持和相對位置精度提出了較高的要求。然而,在大氣環(huán)境中環(huán)境風(fēng)會對編隊(duì)隊(duì)形的保持產(chǎn)生很大的干擾,并且相比有人機(jī)等大飛機(jī),無人機(jī)普遍體型較小、抗風(fēng)干擾能力差。因此,風(fēng)干擾情況下提高無人機(jī)協(xié)同編隊(duì)的保持精度成為亟待解決的問題。
目前,編隊(duì)保持和控制的方法主要包括領(lǐng)航-跟隨法[2]、虛擬結(jié)構(gòu)法[3]、行為控制法[4]以及一致性控制方法[5-6]。Ren在文獻(xiàn)[7]中論證了領(lǐng)航-跟隨法、虛擬結(jié)構(gòu)法以及行為控制法都可以歸入一致性的統(tǒng)一框架內(nèi)。現(xiàn)有的無人機(jī)編隊(duì)控制研究主要集中在通信時(shí)滯和控制受限等情況下的編隊(duì)保持問題。針對干擾情況下的無人機(jī)編隊(duì)保持,侯海平等[8]基于領(lǐng)航-跟隨法提出了一種高階滑模編隊(duì)控制方法,克服了未知干擾的影響;王曉燕等[9]基于領(lǐng)航-跟隨法設(shè)計(jì)了無人機(jī)編隊(duì)魯棒控制器,克服了模型不確定性與外部干擾的影響;Islam等[10]考慮多無人機(jī)系統(tǒng)模型存在的非線性和不確定性,依據(jù)鄰域位置信號,提出了一種基于分布式一致性的魯棒自適應(yīng)控制方法。針對風(fēng)干擾的情況,Wu等[11]研究了風(fēng)干擾下長僚機(jī)編隊(duì)的軌跡跟蹤控制方法,利用反步法結(jié)合干擾觀測器實(shí)現(xiàn)軌跡跟蹤控制;陳俠等[12]針對風(fēng)干擾下多無人機(jī)編隊(duì)的航跡跟蹤問題,提出了一種基于Kalman濾波的一致性跟蹤算法;Kukreti等[13]針對風(fēng)干擾下的軌跡跟蹤,提出了一種遺傳最優(yōu)的無人機(jī)導(dǎo)航算法;Zhang等[14]針對風(fēng)干擾下多旋翼無人機(jī)的時(shí)變編隊(duì),設(shè)計(jì)了一種一致性協(xié)議,并通過試驗(yàn)驗(yàn)證了其有效性。
在上述研究的基礎(chǔ)上,本文針對環(huán)境風(fēng)干擾情況下無人機(jī)編隊(duì)保持精度差的問題,設(shè)計(jì)了基于鄰居無人機(jī)相對狀態(tài)的編隊(duì)保持控制協(xié)議。通過選取適當(dāng)?shù)谋豢剌敵鰜砹炕h(huán)境風(fēng)干擾對固定翼多機(jī)編隊(duì)的影響,將受擾多機(jī)編隊(duì)控制問題轉(zhuǎn)化為魯棒H∞控制問題。對于僚機(jī)之間通信拓?fù)錇橛邢驁D和無向圖的兩種情形,均以線性矩陣不等式的形式給出滿足期望H∞干擾抑制指標(biāo)的多機(jī)編隊(duì)條件,控制參數(shù)求解簡單。仿真結(jié)果表明,該方法能夠有效提高多機(jī)協(xié)同編隊(duì)的魯棒性,抑制風(fēng)干擾對編隊(duì)保持的影響。
1 編隊(duì)的通信拓?fù)?/h2>
采用拓?fù)鋱D來表示無人機(jī)群之間的通信關(guān)系,將每架無人機(jī)看作拓?fù)鋱D中的一個(gè)節(jié)點(diǎn),將無人機(jī)之間的信息交互看作拓?fù)鋱D的邊。

顯然L=D-A。基于長機(jī)無鄰居這一事實(shí),可將Laplacian矩陣L寫成如下分塊矩陣的形式

2 無人機(jī)編隊(duì)數(shù)學(xué)模型
2.1 2個(gè)常用坐標(biāo)系
多無人機(jī)編隊(duì)運(yùn)動需要以坐標(biāo)系為參考標(biāo)準(zhǔn),選取適當(dāng)?shù)淖鴺?biāo)系可以更加方便地描述無人機(jī)的運(yùn)動情況,常用的坐標(biāo)系有如下兩種:
1)大地坐標(biāo)系
大地坐標(biāo)系是固定在地球表面的一種坐標(biāo)系。在地面上任意選取一點(diǎn)作為坐標(biāo)原點(diǎn)O,Ox軸指向北,Oy軸指向東,Oz軸鉛垂向下。
2)航跡坐標(biāo)系
航跡坐標(biāo)系是描述無人機(jī)編隊(duì)飛行的基礎(chǔ)。選取無人機(jī)質(zhì)心為原點(diǎn)O′,與飛行速度V重合的方向?yàn)镺′x′軸,與O′x′軸在同一水平平面且垂直于O′x′軸的方向?yàn)镺′y′軸,O′z′垂直于O′x′y′平面,且滿足右手法則。
2.2 隊(duì)形的幾何描述
以正五邊形編隊(duì)為例給出無人機(jī)編隊(duì)的表示方法,如圖1所示。假設(shè)無人機(jī)已組成預(yù)期編隊(duì),Δi,Δj分別表示第i架無人機(jī)和第j架無人機(jī)相對于長機(jī)的距離差向量,ξ0、ξi、ξj分別為虛擬長機(jī),第i架無人機(jī)和第j架無人機(jī)的位置,它們之間的關(guān)系如下:ξi=ξ0+Δi,ξj=ξ0+Δj。
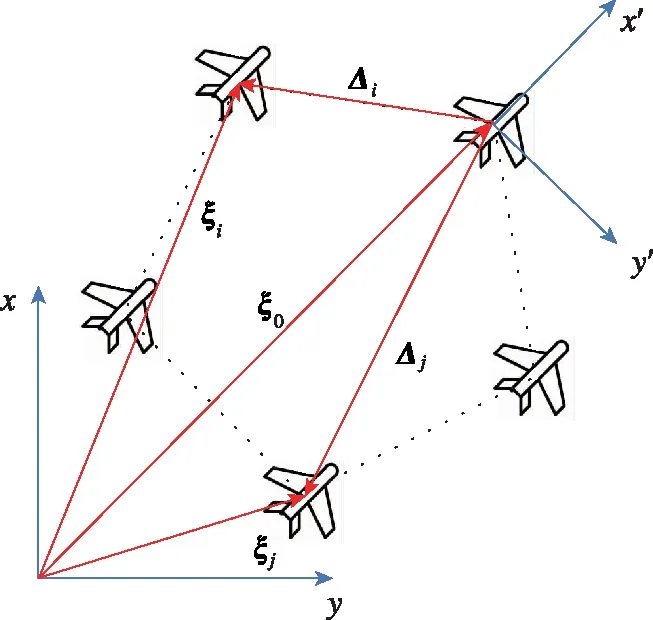
圖1 編隊(duì)的表示方法Fig.1 Formation representation
2.3 無人機(jī)動力學(xué)模型
假設(shè)無人機(jī)無側(cè)滑飛行且不受地球曲率影響,編隊(duì)中第i架無人機(jī)的三維質(zhì)點(diǎn)模型為
(1)
其中,g為重力加速度;Vi、χi、γi分別為無人機(jī)i的線速度、航跡傾斜角和航跡方位角;di=[d1i,d2i,d3i]T為無人機(jī)i受到的風(fēng)干擾;a1i、a2i、a3i分別為無人機(jī)i的切向加速度、法向加速度的水平分量和法向加速度的垂直分量。
3 無人機(jī)編隊(duì)控制器設(shè)計(jì)
3.1 模型轉(zhuǎn)化
記ξi=[xi,yi,zi]T為無人機(jī)i在三維空間中的慣性位置,ai=[a1i,a2i,a3i]T為控制輸入,則
(2)
其中
則系統(tǒng)(2)可以簡寫為
(3)


3.2 問題轉(zhuǎn)化
本文研究了系統(tǒng)(3)的編隊(duì)控制問題,即設(shè)計(jì)了分布式控制協(xié)議ui,使得系統(tǒng)中所有無人機(jī)形成期望編隊(duì)。也就是說
(4)
其中,ξi、ζi分別為第i架無人機(jī)的位置和速度狀態(tài);ξ0、ζ0分別為長機(jī)的位置和速度狀態(tài);Δi、Rgklead(Δi)k分別表示第i架無人機(jī)相對于長機(jī)在航跡坐標(biāo)系和大地坐標(biāo)系下的位移。
(5)
因此,多無人機(jī)系統(tǒng)對風(fēng)干擾的衰減抑制能力,可由從風(fēng)干擾ω到被控輸出z的閉環(huán)傳遞函數(shù)矩陣的H∞范數(shù)進(jìn)行度量,其定義為
(6)

至此,風(fēng)干擾的無人機(jī)系統(tǒng)的編隊(duì)控制問題就轉(zhuǎn)化為H∞控制問題。
3.3 控制協(xié)議設(shè)計(jì)
為解決上述的H∞控制問題,設(shè)計(jì)如下無人機(jī)編隊(duì)控制協(xié)議
Rgklead(Δj)k)+ai0(ξi-Rgklead(Δi)k-ξ0)]-
(7)
其中,k1,k2>0為待定的反饋增益。

(8)


(9)
3.4 多無人機(jī)H∞編隊(duì)條件

(10)

定理:若控制增益k1、k2滿足式(10),并且存在正定矩陣P∈R6N×6N滿足

(11)
證明:考慮如下的Lyapunov函數(shù)
(12)
其中,P∈R6N×6N是正定矩陣。
首先,在沒有外界干擾的情況下,討論系統(tǒng)(9)的穩(wěn)定性問題。對V(t)求導(dǎo)可得
(13)

其次,在干擾ω(t)非零情況下,討論系統(tǒng)(9)的魯棒H∞性能。與上述穩(wěn)定性分析類似,得到
(14)
其中
對任意的T>0,考慮下列代價(jià)函數(shù)

(15)
在零初始條件下,此時(shí)V(0)=0,有


(16)
其中,Ψ=Θ+diag{I6N,-γ2I3N}。

對于僚機(jī)之間的通信拓?fù)鋱D為無向圖的情形,給出下面的推論。
推論:若控制增益k1、k2滿足式(10),并且存在正定矩陣P∈R6×6滿足
(17)
4 仿真實(shí)例
本節(jié)以1架長機(jī)和4架僚機(jī)組成的正五邊形平面編隊(duì)突遇陣風(fēng)為例,通過仿真分析,驗(yàn)證所提出的方法。
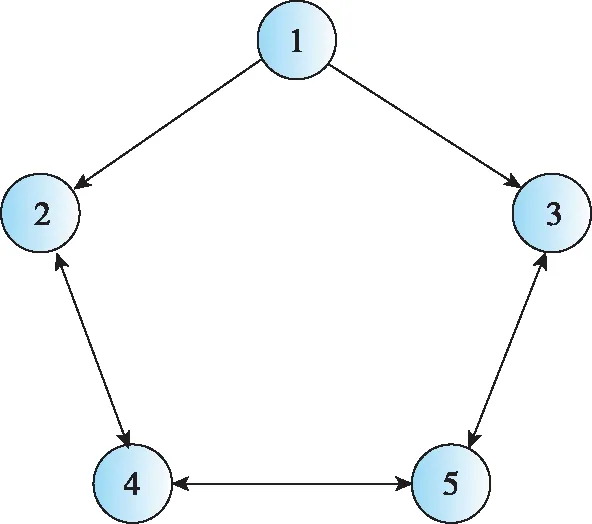
圖2 通信拓?fù)銯ig.2 Communication topology
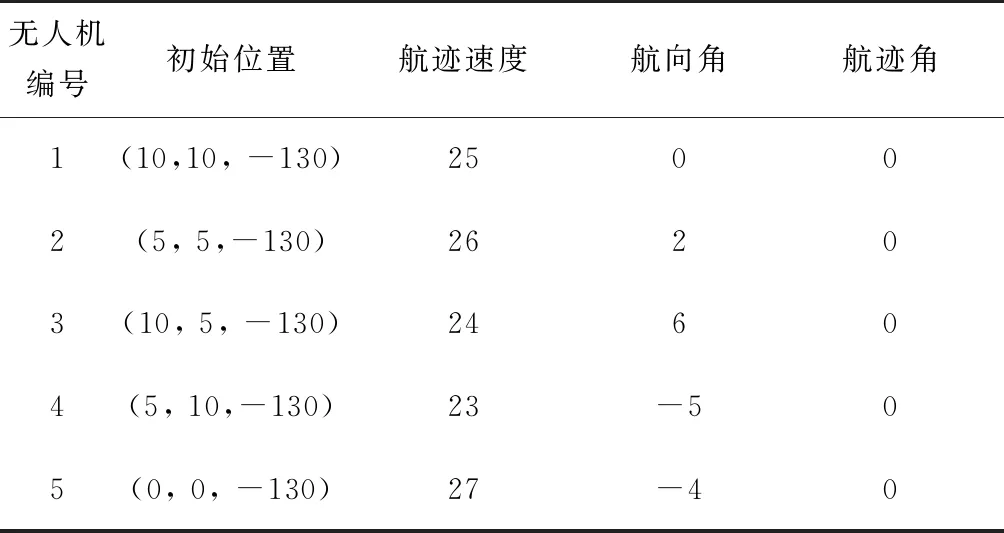
表1 無人機(jī)初始狀態(tài)信息
本文采用三維質(zhì)點(diǎn)模型,考慮到無人機(jī)的實(shí)際機(jī)動能力,在仿真過程中對控制量a1i、a2i、a3i進(jìn)行了限幅
a1i∈[-0.5g,g];
a2i∈[-tan(80°)g,tan(80°)g];
a3i∈[-2g,1.5g]
以1號長機(jī)為原點(diǎn),航跡坐標(biāo)系為參考坐標(biāo)系,設(shè)置2~5號僚機(jī)在長機(jī)坐標(biāo)系中的期望相對位置為
仿真步長為0.01s,在100s時(shí)施加持續(xù)ΔT=5s的陣風(fēng)干擾模擬對編隊(duì)的影響,陣風(fēng)干擾的模型如下
(18)
其中,t∈[0,ΔT)為陣風(fēng)持續(xù)的時(shí)間。圖 3所示為仿真過程中僚機(jī)相對長機(jī)的位置變化;圖 4、圖5和圖6分別為X軸、Y軸、Z軸3個(gè)方向的相對位置變化在95~150s時(shí)間內(nèi)的局部放大圖;圖 7所示為t1= 105s,t2=115s,t3=150s這3個(gè)時(shí)刻所保持的編隊(duì)隊(duì)形。

圖3 在長機(jī)坐標(biāo)系下的相對位置Fig.3 Relative positions in the leader’s coordinate
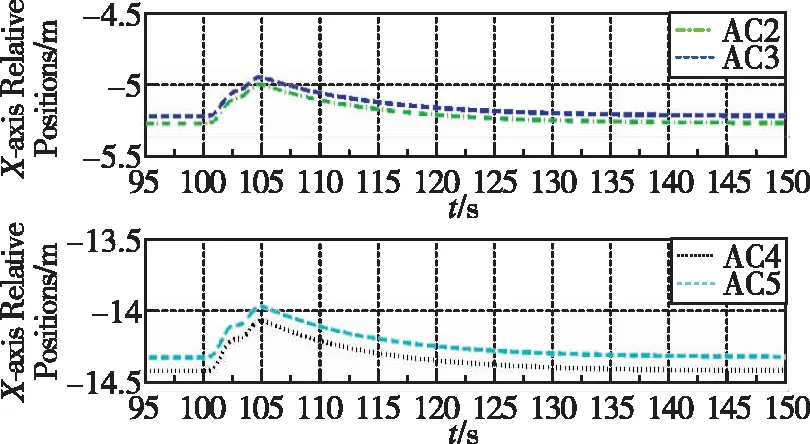
圖4 X軸方向相對位置Fig.4 X-axis relative positions

圖5 Y軸方向相對位置Fig.5 Y-axis relative positions
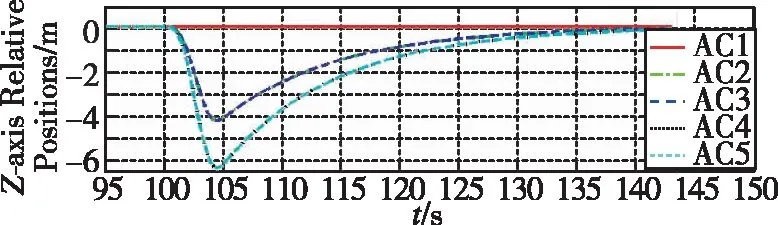
圖6 Z軸方向相對位置Fig.6 Z-axis relative positions

圖7 編隊(duì)隊(duì)形(t1= 105s, t2=115s, t3=150s)Fig.7 Formation patterns(t1= 105s, t2=115s, t3=150s)
5 結(jié)論
本文針對環(huán)境風(fēng)干擾情況下無人機(jī)編隊(duì)保持精度差的問題,設(shè)計(jì)了基于鄰居無人機(jī)相對狀態(tài)的編隊(duì)控制協(xié)議。理論分析與仿真結(jié)果表明:
1)采用一致性編隊(duì)控制方法,避免了領(lǐng)航-跟隨法缺少隊(duì)形反饋、不適合大規(guī)模編隊(duì)的問題,擴(kuò)展性更強(qiáng);
2)以線性矩陣不等式的形式給出了滿足期望抑制指標(biāo)的多機(jī)編隊(duì)條件,對于僚機(jī)之間的通信拓?fù)鋱D為無向圖的情形,僅通過求解2個(gè)線性不等式確定控制協(xié)議,控制參數(shù)求解簡單、可離線計(jì)算,并且不需要單獨(dú)設(shè)計(jì)各通道。
3)本文所提方法能夠有效提高多機(jī)協(xié)同編隊(duì)的魯棒性,抑制風(fēng)干擾對編隊(duì)保持的影響。
