工業機器人控制系統中PLC技術的應用分析
2020-09-14 09:03:08趙亮
工業加熱 2020年8期
關鍵詞:分析
趙 亮
(寶雞職業技術學院 機電信息學院, 陜西 寶雞 721013)
機電一體化是我國工業化未來發展的必然趨勢,隨著工業技術的快速發展,工業機器人的性能越來越強,使工業生產率得到了較大幅度的提升[1]。PLC技術是一項應用靈活、抗干擾能力強、控制能力強的工業控制技術,隨著PLC技術與機械、網絡等領域不斷融合,應用前景也越來越廣闊[2]。因此,本文詳細介紹了工業機器人控制系統中PLC技術的應用方法。
1 工業機器人概述
工業機器人指的是,借助自動控制和重復編程,在制定過程中完成某些操作的一體化機電設備。美國Unimation公司于1962年首次推出一臺名為“NUIMATE”的工業機器人,并投入于汽車生產[3]。隨著工業機器人的完善與改進,相關技術的不斷進步,相關產品的自動化、智能化水平不斷提升。作為一種技術含量較高的機電一體化產品,工業機器人能夠實現生產線自動化水平的大幅提升,同時也能夠克服許多復雜的工業生產環境,在改善工業品質量的同時,也能夠大幅節省人力資源,并提高經濟效益。
2 PLC技術概述
對于現代工業來說,PLC已經占據了不可替代的重要地位,它與伺服控制和工業機器人一起成為了現代工作的重要組成部分,隨著CPU處理速度的提升以及PLC技術的快速發展,智能型PLC和分散型PLC已經實現了I/O的遠程分散就地安裝[4]。PLC軟硬件正朝著模塊化的方向發展,并且廣泛采用了圖形顯示技術、網絡通信技術和計算機技術,實現了系統之間相互連接以及系統自身的遠程擴展和局部擴展,并兼容各種網絡協議[5]。隨著PLC運動控制性能的逐漸提升,PLC技術在工業機器人領域已經得到了十分廣泛的應用,加強對PLC技術的研究,對于提高機器人操作精度、加強機器人操作的靈活度有著十分重要的意義。
3 工業機器人控制系統中PLC技術的實際應用
本次研究中所分析的工業機器人,其各種動作的實現源于大臂與小臂的旋轉以及升降臂的縱向運動,有六個自由度和四個獨立的關節。由于大臂、小臂與手爪、手腕有著相似的姿位,因此決定通過伺服電機進行驅動,各伺服器所設置的驅動模塊完全一致。大臂和小臂呈旋轉運動,升降臂呈縱向運動。由于運動形式十分典型,因此本次研究重點基于PLC技術對小臂、大臂和升降臂的控制方法進行分析。
3.1 控制原理
本次研究所分析的工業機器人如圖1所示,該裝置內包含3條傳動鏈,每一個關節都由特定的傳動鏈進行驅動。升降臂在電機1的作用下作垂直運動,電機1安裝在底座,傳動比為1∶80,在減速器1的作用下,電機的輸出傳遞至絲桿,升降臂在螺桿傳動機構的作用下作上、下運動;大臂在關節的作用下作旋轉運動,升降臂的上端安裝有傳動比為1∶80的電機2,在減速器2的作用下,電機的輸出驅使大臂作旋轉運動;小臂在關節的作用下作旋轉運動,大臂左端安裝有傳動比為1∶80的電機,在減速器3 的作用下,電機的輸出會驅動齒形帶,進而驅使小臂作旋轉運動。
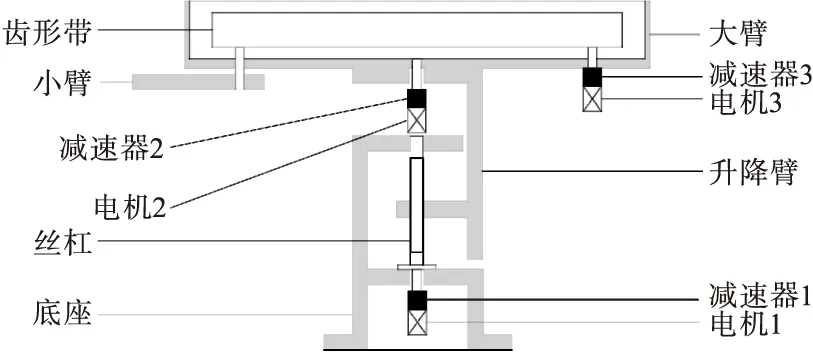
圖1 機器人傳動機制
本次研究所分析的工業機器人,其運動方式為兩個定軸的轉動和一個縱軸的直線運動,由兩臺伺服器對呈旋轉運動的大臂和小臂分別進行控制,由另外一臺伺服器對來對垂直運動的升降臂進行控制。驅動器和電機的設備型號如表1所示。
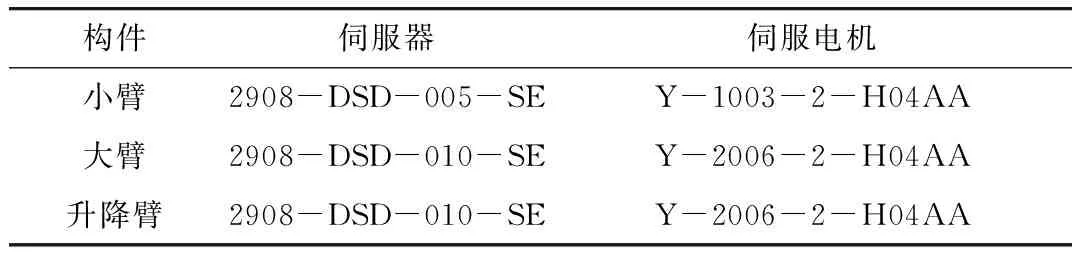
表1 驅動器和電機的設備型號
3.2 位置參數設置
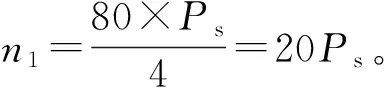
本次研究所采用的伺服控制方案為半閉環控制,通過電機中內置的光電編碼器來提升位置精度,這就需要通過合理的位置參數來對機器人末端在特定空間內的運行進行精準的控制。
1)升降臂
2)大臂
3)小臂
在于MAM指令中采用同時控制的情況下,應當根據各軸速度成比例地設置速度參數,即n1∶n2∶n3=v1∶v2∶v3。另外需要注意的是,在本次研究所分析的工作機器人中,由于各個伺服器是相互獨立的,因此需要具有一致的增益,才能夠實現各軸之間的協調控制。
3.3 精度分析
對于工業機器人來說,安裝精度、運動慣性、溫度、機械部分的變形和振動、電機精度等因素共同決定了各個機械臂在運用狀態下的位置精度。
本次研究所分析的工業機器人采用全數字交流伺服驅動系統進行控制,所使用的控制方案為ControlLogix PLC控制系統,經過精度分析后,獲取以下幾點分析結果。
(2)在電機非負載軸端安裝增量式光電碼盤,能夠使位置控制系統避免受到機械部件變形和振動的影響。
(3)為了抑制電路溫度漂移,本次研究引入全數字式伺服驅動方案,在提高穩定性的同時,也能夠避免相關參數受溫度影響。
(4)本次研究所分析的工業機器人設置有磁釋放24VDC抱閘器,電機采用低慣量轉子,除了可以進行手動控制之外,還能夠借助伺服電機實現自動控制,進而實現幾乎為零的運動慣性。
(5)通過光纖連接驅動器和控制系統,保密性好,在不受電磁干擾的基礎上,還能夠提高數據傳輸速率。
(6)大臂與升降臂均采用U型結構設計,材質為鋁合金材料,使機器人在受控性良好的基礎上還具有一定的剛度。然而這種設計方案的缺點在于,由于手臂材質的質量較小,運行時會出現微小的振動,一定程度上會影響到運動精度。
(7)通過齒形帶來帶動小臂,在維持較低運動間隙的同時,也能夠維持較好的運動精度。
4 結 語
本次研究基于PLC技術,對工業機器人的控制方案進行了詳細的介紹,重點分析了機器人的運動控制原理,借助ControlLogix PLC控制系統來精確地控制機器人的運行狀態。在未來的研究工作中,還需要重點做好針對工業機器人軌跡控制、速度控制以及網絡控制等方面的工作,既要提升機器人運動的靈活度,也要實現機器人的變速移動。尤其是在無線通信技術快速發展的大背景下,實現伺服器與機器人之間的遠程無線連接,能夠進一步擴大工業機器人設備與相關技術的應用范圍,推動我國工業化水平快速提升,邁向更高的層次。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
