基于GNSS的全電推進(jìn)SmallGEO衛(wèi)星自主入軌方法
2020-09-11 07:38:44王昊光李國通石碧舟蔣桂忠武國強(qiáng)
無線電通信技術(shù) 2020年5期
關(guān)鍵詞:方法
王昊光,李國通,石碧舟,張 軍,蔣桂忠,沈 苑,武國強(qiáng)
(1.上海微小衛(wèi)星工程中心,上海 200120;2.中國科學(xué)院微小衛(wèi)星創(chuàng)新研究院,上海 200120)
0 引言
天地一體化信息網(wǎng)絡(luò)是以地面互聯(lián)網(wǎng)和移動(dòng)通信網(wǎng)為依托,以天基網(wǎng)絡(luò)為拓展,采用統(tǒng)一技術(shù)架構(gòu)、統(tǒng)一技術(shù)體制、統(tǒng)一標(biāo)準(zhǔn)規(guī)范構(gòu)建的信息基礎(chǔ)設(shè)施。天地一體化信息網(wǎng)絡(luò)組成包括天基骨干網(wǎng)、天基接入網(wǎng)和地基節(jié)點(diǎn)網(wǎng)。建成后,將使中國具備全球時(shí)空連續(xù)通信、區(qū)域大容量通信、高機(jī)動(dòng)全程信息傳輸?shù)饶芰Α?/p>
天基骨干網(wǎng)是天地一體化信息網(wǎng)絡(luò)實(shí)現(xiàn)天基組網(wǎng)、地網(wǎng)跨代、天地互聯(lián)的重要依托,由地球同步軌道上多個(gè)骨干節(jié)點(diǎn)互聯(lián)組網(wǎng)而成,同時(shí)又與天基接入網(wǎng)、地基節(jié)點(diǎn)網(wǎng)互聯(lián),提供大容量信息傳送能力,為天基、空基及重要地表用戶提供全球范圍內(nèi)寬帶接入與數(shù)據(jù)傳輸服務(wù)。天基骨干網(wǎng)節(jié)點(diǎn)衛(wèi)星中的兩顆衛(wèi)星采用中科院微小衛(wèi)星創(chuàng)新研究院的全電推SmallGEO平臺(tái)。該平臺(tái)將在國內(nèi)首次采用霍爾推力器完成從過渡軌道到地球同步軌道(GTO-GEO)的轉(zhuǎn)移、定點(diǎn)捕獲和定點(diǎn)保持等任務(wù)。由于霍爾推力器推力小,導(dǎo)致衛(wèi)星轉(zhuǎn)移軌道段時(shí)間長達(dá)200天以上,這對(duì)地面實(shí)施測控、衛(wèi)星軌道確定和軌道控制等任務(wù)提出了新的挑戰(zhàn)。
目前,對(duì)于地球同步轉(zhuǎn)移軌道設(shè)計(jì)問題可以分為兩類:一類是以化學(xué)燃料推進(jìn)系統(tǒng)為代表的脈沖變軌問題,化學(xué)推進(jìn)系統(tǒng)推力量級(jí)大,可以在較短的時(shí)間內(nèi)完成變軌,因此可以以瞬時(shí)速度增量表示變軌過程;另一類是以電推進(jìn)系統(tǒng)為代表的連續(xù)推力變軌問題,本質(zhì)上不同于脈沖變軌問題,不再存在可積分的弧段,因?yàn)槭┘釉谛l(wèi)星上的推力大小和方向是隨時(shí)間一直變化的,必須進(jìn)行建模計(jì)算。國外對(duì)電推進(jìn)變軌問題已有很多研究,并已在實(shí)際任務(wù)中得到驗(yàn)證。如DS1的小行星任務(wù)和SMART-1的月球探測任務(wù)。地球同步軌道衛(wèi)星由運(yùn)載火箭送至軌道傾角為零的地球同步轉(zhuǎn)移軌道(GTO),再由星上電推進(jìn)系統(tǒng)送入地球同步軌道(GEO),Biagioni針對(duì)該問題給出了電推進(jìn)變軌策略[1]。Ocampo基于波音公司的 BSS-702SP衛(wèi)星平臺(tái),研究了電推進(jìn)變軌策略[2]。目前我國已經(jīng)在試驗(yàn)衛(wèi)星(實(shí)踐九號(hào)、實(shí)踐二十號(hào))上完成電推進(jìn)系統(tǒng)的點(diǎn)火試驗(yàn),但尚無電推進(jìn)變軌的實(shí)踐,理論研究主要集中于以電推進(jìn)為代表的小推力轉(zhuǎn)移軌道優(yōu)化[1-7]。
本文針對(duì)電推進(jìn)系統(tǒng)在軌實(shí)際應(yīng)用問題,研究適用于全電推進(jìn)變軌的軌道確定方法和變軌方法。首先針對(duì) GTO-GEO電推進(jìn)變軌過程,設(shè)計(jì)時(shí)間最短最優(yōu)制導(dǎo)律;然后對(duì)變軌期間的GNSS導(dǎo)航星可見性進(jìn)行分析,設(shè)計(jì)了衛(wèi)星GNSS定軌方案,最后對(duì)提出的定軌方法和軌道控制方法進(jìn)行了仿真,驗(yàn)證其工程可行性。
1 SmallGEO平臺(tái)簡介
SmallGEO衛(wèi)星平臺(tái)配置星敏、陀螺和太陽敏感器等姿態(tài)敏感器,采用反作用輪進(jìn)行姿態(tài)控制;具有4臺(tái)300 mN型霍爾電推力器,安裝于衛(wèi)星-Z面,推進(jìn)零位方向穿過衛(wèi)星的質(zhì)心,并配置矢量調(diào)節(jié)機(jī)構(gòu)。單顆星質(zhì)量約2 000~2 500 kg,總功率高于9 000 W,有效載荷容量達(dá)到500~600 kg,采用一箭雙星方式入軌。圖1為衛(wèi)星結(jié)構(gòu)示意圖和電推進(jìn)安裝示意圖。
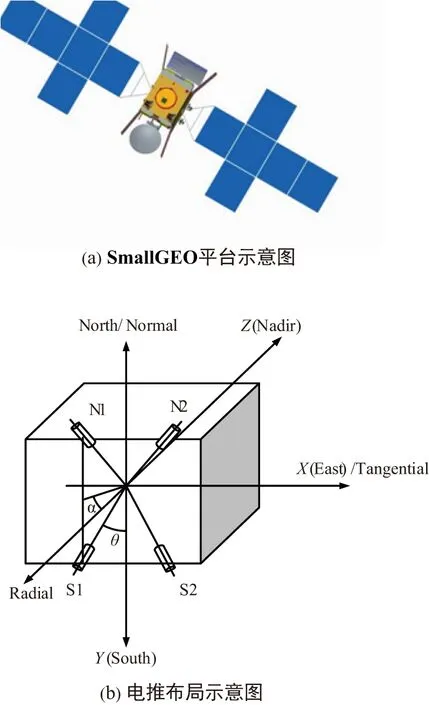
圖1 SmallGEO平臺(tái)和電推布局示意圖Fig.1 Diagram of SmallGEO satellite and the layout of electric propulsion
SmallGEO衛(wèi)星的軌道控制采用“天-地”大閉環(huán)控制方案,軌道控制系統(tǒng)的基本工作原理如圖2所示。根據(jù)軌道控制周期,地面通過優(yōu)化變軌策略計(jì)算軌道控制參數(shù),并上注到衛(wèi)星。每個(gè)控制周期內(nèi),星上通過自主確定的軌道和測量的姿態(tài)完成姿態(tài)確定,利用上注的軌控參數(shù)調(diào)整姿態(tài),控制電推進(jìn)工作完成軌道轉(zhuǎn)移。下面對(duì)方案中的關(guān)鍵技術(shù)軌道轉(zhuǎn)移策略和自主定軌方法進(jìn)行描述。

圖2 SmallGEO衛(wèi)星姿態(tài)軌道控制系統(tǒng)工作原理示意圖Fig.2 Diagram of orbit transfer law for SmallGEO satellite
2 電推進(jìn)GEO衛(wèi)星軌道轉(zhuǎn)移控制策略
以SmallGEO平臺(tái)為實(shí)踐對(duì)象,根據(jù)天地一體信息網(wǎng)絡(luò)任務(wù)要求,綜合國內(nèi)外學(xué)者小推力變軌研究成果,提出了以轉(zhuǎn)移時(shí)間最短為優(yōu)化目標(biāo)的軌道轉(zhuǎn)移控制策略。在軌道轉(zhuǎn)移任務(wù)期間,推力器在除地影及其他任務(wù)需求以外的所有區(qū)域內(nèi)均保持最大推力連續(xù)工作。推力器指向由衛(wèi)星通過反作用輪自主控制姿態(tài)實(shí)現(xiàn)。
全電推進(jìn)衛(wèi)星軌道動(dòng)力學(xué)模型采用春分點(diǎn)軌道根數(shù)進(jìn)行描述[8-10],如式(1)所示。
(1)
其中,w=1+fcosL+gsinL,s2=1+h2+k2,μ為地球引力常數(shù),[frftfn]T為衛(wèi)星所受外力(攝動(dòng)力與推力)加速度。
由于電推進(jìn)的加速度遠(yuǎn)小于地球引力加速度,因此快變量L可描述成:
(2)
(3)
具體形式為:

(4)
其中,
式中,Lin,Lout為航天器進(jìn)、出地影的角度,F(xiàn)t為推力幅值,F(xiàn)p為攝動(dòng)幅值,α為推力方向向量,fp為攝動(dòng)力方向向量。
取性能指標(biāo)為軌道轉(zhuǎn)移時(shí)間最短:
J=tf→min;
(5)
初始及末端約束:
x(t0)=x0,
x(tf)=xf;
(6)
向量α滿足極大值原理的解α*的計(jì)算表達(dá)式為:
(7)
3 基于GNSS的軌道確定方法
3.1 GNSS衛(wèi)星可見性分析
根據(jù)衛(wèi)星運(yùn)行軌道高度情況,GNSS工作大致可分為兩種情況:一種為軌道高度低于導(dǎo)航星座軌道,通過頭頂導(dǎo)航衛(wèi)星實(shí)現(xiàn)定位;另一種為軌道高于導(dǎo)航星座軌道,觀測地球?qū)γ鎸?dǎo)航衛(wèi)星實(shí)現(xiàn)定位。
對(duì)于第二種情況,由于GNSS導(dǎo)航衛(wèi)星發(fā)射天線方向固定指向地球,且主瓣信號(hào)發(fā)射夾角有限,所以部分GNSS信號(hào)會(huì)被地球完全遮擋,故只有當(dāng)高軌航天器與GNSS導(dǎo)航衛(wèi)星分別位于地球兩側(cè),且傳播鏈路不受地球遮擋時(shí),高軌衛(wèi)星接收器才能接收到GNSS信號(hào)[11-13],圖3為高軌衛(wèi)星接收器接收GNSS信號(hào)的傳播示意圖。
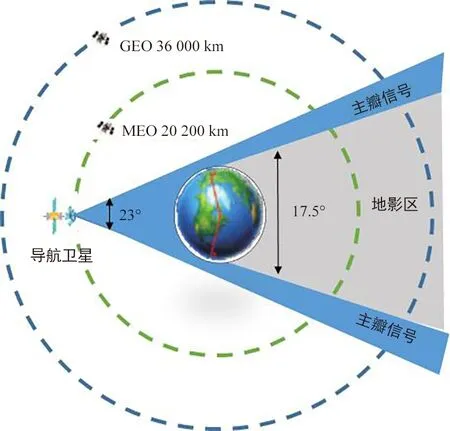
圖3 高軌衛(wèi)星接收GNSS信號(hào)傳播示意圖Fig.3 Diagram of GNSS signal receiving for high orbit satellite
圖3中,由于導(dǎo)航衛(wèi)星下視天線的主瓣信號(hào)張角為23°,即衛(wèi)星主瓣信號(hào)覆蓋GNSS星座下方的23°區(qū)域;而在地球的對(duì)側(cè),由于地球的遮擋形成了17.5°的扇形地影區(qū)。當(dāng)高軌衛(wèi)星進(jìn)入地影區(qū)后,將無法接收到來自地球?qū)?cè)GNSS衛(wèi)星的信號(hào),因此在高軌環(huán)境中,有效的主瓣信號(hào)覆蓋區(qū)為5.5°,根據(jù)GNSS定位原理可知,為完成基于GNSS的GEO衛(wèi)星定軌,主瓣的窄帶區(qū)域至少要同時(shí)可見4顆GNSS衛(wèi)星。
基于上述軌道轉(zhuǎn)移策略,衛(wèi)星需要不停地調(diào)整姿態(tài)以適應(yīng)推力指向要求。考慮GPS、北斗和GLONASS三個(gè)導(dǎo)航星座,對(duì)不同姿態(tài)指向、不同GNSS天線安裝方式的導(dǎo)航星可見性進(jìn)行了仿真。仿真結(jié)果顯示,軌道高度低于10 000 m時(shí),對(duì)天指向下導(dǎo)航星不是全軌可見,但可見區(qū)域能夠保證可見星數(shù)大于10顆時(shí)間超過3 h;軌道高度高于10 000 m時(shí),保證GNSS天線對(duì)地情況下,能夠保證可見星數(shù)大于10顆,實(shí)現(xiàn)衛(wèi)星位置確定。部分仿真圖如圖4所示。

圖4 衛(wèi)星于不同高度不同指向下導(dǎo)航星可見數(shù)量Fig.4 Number of usable navigation satellites in different altitudes and attitudes
3.2 GNSS配置
根據(jù)上述分析結(jié)果,SmallGEO平臺(tái)配置3臺(tái)GNSS設(shè)備實(shí)現(xiàn)衛(wèi)星位置確定。GNSS設(shè)備同時(shí)接收 GPS、GLONASS 和 BD 導(dǎo)航星信號(hào)實(shí)現(xiàn)衛(wèi)星實(shí)時(shí)、定位、定軌,為衛(wèi)星提供精確的當(dāng)前軌道數(shù)據(jù)和時(shí)間信息(時(shí)間數(shù)據(jù)和PPS)。為了覆蓋GTO軌道高度(200~55 000 km)以及GEO軌道,配置高、低增益天線,雙天線聯(lián)合解算。3個(gè)設(shè)備共享3副天線,分別安裝于衛(wèi)星+Z、-Z和-X面。GNSS組成原理如圖5所示。其中信號(hào)處理SOC是接收模塊關(guān)鍵部分,完成信號(hào)處理和位置解算;其他部分完成無線信號(hào)接收和解調(diào)。

圖5 GNSS接收模塊系統(tǒng)組成框圖Fig.5 Diagram of GNSS receiving module system
3.3 軌道確定方法
根據(jù)GNSS導(dǎo)航星可見性分析及衛(wèi)星平臺(tái)GNSS配置情況,SmallGEO自主軌道確定方法如圖6所示,其核心算法是帶軌道動(dòng)力學(xué)模型的卡爾曼濾波器(EKF)。利用離散的帶有觀測噪聲和粗差的星載觀測數(shù)據(jù),結(jié)合高度非線性的動(dòng)力學(xué)模型,并顧及動(dòng)力學(xué)模型補(bǔ)償加速度的確定性分量,運(yùn)用白噪聲驅(qū)動(dòng)的有色動(dòng)態(tài)噪聲的卡爾曼濾波理論,在沒有人工干預(yù)的情況下,實(shí)時(shí)獲得衛(wèi)星運(yùn)動(dòng)狀態(tài)的最優(yōu)估計(jì),為衛(wèi)星提供實(shí)時(shí)高精度的軌道數(shù)據(jù)。

圖6 衛(wèi)星自主軌道確定方法Fig.6 Diagram of autonomous orbit determination
軌道確定算法主要包括軌道動(dòng)力學(xué)模型、觀測方程和EKF三部分[14-15],具體描述如下。
3.3.1 軌道動(dòng)力學(xué)模型
軌道動(dòng)力學(xué)狀態(tài)方程設(shè)計(jì)如式(8)所示:
(8)
式(8)可簡寫為:

(9)
式中,X=[x,y,z,vx,vy,vz]T,x,y,z,vx,vy,vz分別為衛(wèi)星J2000坐標(biāo)系下三軸位置速度信息;μ為地心引力常數(shù);J2為二階地心引力系數(shù);Re為地球半徑;ΔFx,ΔFy,ΔFz分別為三軸所受的攝動(dòng)力及電推力分量。對(duì)于攝動(dòng)力,主要考慮了地球非球形引力、大氣、光壓、日月、固體潮及經(jīng)驗(yàn)力等對(duì)衛(wèi)星的影響,分別依據(jù)相應(yīng)的攝動(dòng)力模型得到;而電推力大小方向則利用電推進(jìn)模型及電推進(jìn)噴氣指令估算得到。
3.3.2 觀測方程
觀測方程如式(10)所示:
Δρ=HΔx,
(10)
式中,Δρ表示真空偽距和預(yù)測偽距的差;H表示觀測方程系數(shù)矩陣,由偽距計(jì)算函數(shù)偏導(dǎo)數(shù)得到;Δx表示真實(shí)位置與外推位置之間的偏離。
(11)
3.3.3 EKF算法
基于上述小節(jié)中推導(dǎo)所得到的預(yù)報(bào)偽距值,GNSS衛(wèi)星觀測偽距值以及觀測方程,利用擴(kuò)展Kalman濾波(EKF)方法,即可實(shí)時(shí)獲得精確的衛(wèi)星位置信息。通過將軌道動(dòng)力學(xué)方程轉(zhuǎn)化為狀態(tài)向量為殘差量的線性系統(tǒng),如式(12)、式(13)所示。
Δxk+1=φ(Δxk)+ωk,
(12)
Δyk=H(Δxk)+vk。
(13)
可按照以下步驟實(shí)現(xiàn)基于EKF的非線性系統(tǒng)狀態(tài)實(shí)時(shí)確定。
a) 初始化
(14)
對(duì)增量分量Δx的估計(jì)值為0。
b) 預(yù)報(bào)狀態(tài)變量及協(xié)方差
(15)

c) 計(jì)算擴(kuò)展kalman濾波增益
(16)
d) 更新狀態(tài)變量及協(xié)方差
17)
式中,Hk為觀測方程中觀測矩陣,Δyk則為觀測殘差。
e) 實(shí)現(xiàn)非線性系統(tǒng)狀態(tài)向量的更新
(18)
f) 狀態(tài)轉(zhuǎn)移矩陣φk求取方法
(19)
4 仿真分析
為了驗(yàn)證上文所提出的軌道轉(zhuǎn)移方法和定軌方法,進(jìn)行了數(shù)學(xué)仿真,全電推進(jìn)衛(wèi)星參數(shù)及初始軌道根數(shù)如表1~表3所示。

表1 衛(wèi)星參數(shù)Tab.1 Parameters of satellite

表2 開普勒軌道根數(shù)Tab.2 Kepler orbit parameters of satellite

表3 春分點(diǎn)軌道根數(shù)Tab.3 Vernal equinox orbit parameters of satellite
全電推進(jìn)衛(wèi)星GTO-GEO軌道轉(zhuǎn)移控制策略優(yōu)化結(jié)果如圖7和圖8所示。

圖7 GTO-GEO軌道轉(zhuǎn)移半長軸、偏心率和傾角變化情況 Fig.7 Response of semi-major axis,eccentricity and inclination
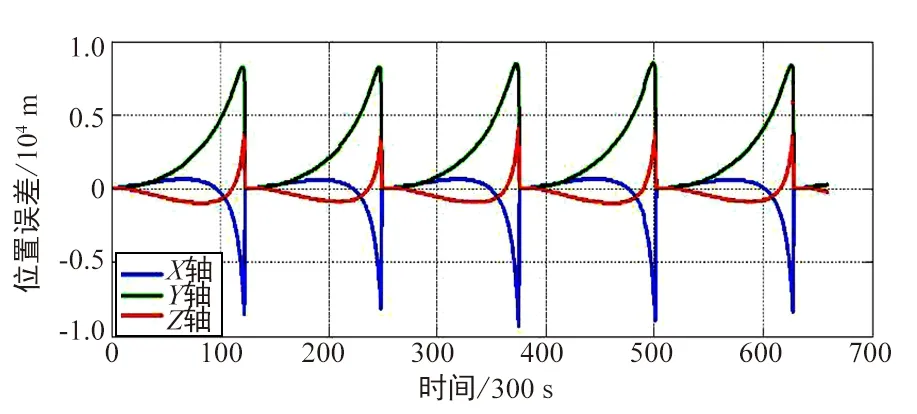
圖8 GNSS濾波定軌衛(wèi)星三軸位置誤差(引入10 000 km 以上無GNSS信號(hào)情況)Fig.8 Error of position determined by GNSS EKF
由仿真結(jié)果可以看出,在210天左右,衛(wèi)星軌道半長軸、偏心率和傾角等參數(shù)達(dá)到了目標(biāo)值。半長軸控制精度優(yōu)于500 m,偏心率控制精度優(yōu)于10-4。在引入衛(wèi)星軌道高度10 000 km以上無GNSS數(shù)據(jù)情況下,GNSS濾波定軌算法能夠用動(dòng)力學(xué)外推進(jìn)行定軌,外推一個(gè)軌道周期位置精度優(yōu)于10 km。當(dāng)GNSS信號(hào)恢復(fù)后,濾波算快速收斂,位置精度滿足衛(wèi)星軌道控制需求。
5 結(jié)論
綜上,在國內(nèi)外關(guān)于小推力變軌研究成果基礎(chǔ)上,提出了時(shí)間最優(yōu)的軌道轉(zhuǎn)移策略,并通過神經(jīng)網(wǎng)絡(luò)對(duì)實(shí)時(shí)協(xié)態(tài)變量進(jìn)行尋優(yōu)調(diào)整。根據(jù)轉(zhuǎn)移段軌道情況,提出基于GNSS的軌道確定方案,對(duì)不同軌道高度和不同姿態(tài)指向下導(dǎo)航星可見性進(jìn)行分析,確定了SmallGEO平臺(tái)GNSS接收機(jī)配置方案和星上軌道確定方法。數(shù)學(xué)仿真結(jié)果表明,提出的軌道控制方法能夠較好實(shí)現(xiàn)衛(wèi)星自主入軌。研究降低了全電推進(jìn)GEO衛(wèi)星軌道轉(zhuǎn)移過程對(duì)地面測控資源的需求,提高了衛(wèi)星軌道轉(zhuǎn)移自主控制能力,后續(xù)將繼續(xù)開展該方法的工程應(yīng)用。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(bào)(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56