基于PLC的風力發(fā)電控制系統(tǒng)
2020-09-10 17:11:26孟祥南
客聯(lián) 2020年10期
關(guān)鍵詞:風力發(fā)電
孟祥南
【摘 要】風能屬于新能源中的的一種,發(fā)展空間非常大并且商業(yè)價值很高。計算機和能夠編程的控制器在信息時代中應運而生,大大推動了對于風力發(fā)電的研究和開發(fā)。所以本文采用西門子可編程控制器s7-200來研究本次論文。主要內(nèi)容有電氣原理圖、設(shè)計流程圖、PLC、電氣元件的選擇等。
【關(guān)鍵詞】風力發(fā)電;可編程控制器;偏航
一、風力發(fā)電的工作原理和構(gòu)造
(一)風電機組的工作原理概述
借助風吹動風車造成風車旋轉(zhuǎn)帶動發(fā)電機生產(chǎn)電能,借助傳動軸經(jīng)轉(zhuǎn)子獲得的動力輸送到發(fā)動機中。共由兩部分構(gòu)成,包括:風輪機和發(fā)電機。風輪機的作用是將風能轉(zhuǎn)變成機械能,發(fā)電機的功能是將產(chǎn)生的機械能轉(zhuǎn)變成電能。
風電機組按照容量劃分能夠劃分為三種,包括:1.小型風電機組,容量不超過10kw;2.中型風電機組,容量在10-100kw之間;3.大型風電機組,容量大于100kw。根據(jù)主軸與地面的對應位置關(guān)系,能夠?qū)⑵鋭澐譃閮煞N:一是水平軸風力發(fā)電機組,此時主軸與地面具有平行關(guān)系;二是垂直軸風力發(fā)電機組,此時主軸與地面之間呈90°夾角。現(xiàn)如今,風電機主要有4部分零部件組成,分別是風輪組件、機艙組件、塔架組件、控制部分。
(二)風電機組的結(jié)構(gòu)組成
在風電機組中必須有葉輪葉片、發(fā)電機定子、測風系統(tǒng)、底板、偏航電機、塔架、發(fā)電機轉(zhuǎn)子、變槳系統(tǒng)、輪轂,并且缺一不可,否則就不是一個健全的風電機組。
風輪由三部分組成:葉片、輪轂、風輪軸。還包括變槳機構(gòu)。功能是使風力使葉片旋轉(zhuǎn)發(fā)電、發(fā)電機機頭轉(zhuǎn)動。風能轉(zhuǎn)化為機械能后的能量通過風輪軸送到傳送機構(gòu)。葉片一般分為平板型、弧板型、流線型。一般風能越大所獲取的能量就越多。葉片會影響風能的利用率。所以葉片的要求會很高。材料強度、密度、硬度和使用壽命。
輪轂的作用是將葉片以及葉片組安裝在主軸上。通常有兩類,包括:固定式和鏈絞式。作用是將葉片的力和力矩傳遞到主傳動機構(gòu)中。
風輪軸也被成為主軸或低速軸。被安裝在風輪和齒輪箱之間的位置。前面端子的作用是連接螺栓和輪轂。后面的端子被用來連接齒輪低速。風輪軸表現(xiàn)出較高的綜合機械型。
變槳機構(gòu)主要的作用時隨著風速的變化來調(diào)整槳距的夾角,從而確保發(fā)電機高效的運轉(zhuǎn)。
風力發(fā)電機的機艙主要是為各種零部件提供一個工作的空間,并且承受外力的壓迫,因此,對制造材料的硬度、光滑度以及均勻厚度等要求很高。主要部件有齒輪箱以及發(fā)電機等。風力發(fā)電機的轉(zhuǎn)子位于機艙的左側(cè)。
傳動機構(gòu)主要包括增速器、主軸、齒輪箱、發(fā)電機、軸連器等,功能是將機械能傳輸?shù)桨l(fā)電機中。
發(fā)電機是將風能產(chǎn)生的機械能轉(zhuǎn)變成電能的裝置。通常采用直流發(fā)電機、風力發(fā)電機等專用發(fā)電機,包括永磁發(fā)電機、異步交流發(fā)電機等。
齒輪箱:功能是平衡低速轉(zhuǎn)動的風電機和高速轉(zhuǎn)動的發(fā)電機。因會受到強風沖擊,所以對材料的要求也非常高。按照傳動方式分類:展開式、分流式、同軸式、混合式。
塔架部件:支撐機艙和輪片等主要發(fā)電器件。高度較高且與地基的連接要很高的穩(wěn)定性和安全性來應對風力的強大沖擊。內(nèi)部有線纜來傳輸電能。空間大有爬梯和導軌,用來維修和護理時人工的處理。基本形式:單管拉線式、衍架拉線式、錐桶式。
控制部分:控制系統(tǒng)是最關(guān)鍵的核心部分。整個風電機組的運行狀態(tài)以及方式都是由它來控制。大多選擇PLC(可編程控制器)或者DSP(微機處理器)。因為功能強,可靠性高,所以在很多方面都有應用。
功能:對數(shù)據(jù)進行采集、傳遞、分析、運算,然后有效的控制風電機。以達到功率穩(wěn)定,轉(zhuǎn)速合理。出現(xiàn)故障也能很快的檢測到原因并分析以保護相對應的措施。
用戶界面通過編程,輸入?yún)?shù)等來控制總系統(tǒng)的啟動和停止,然后傳輸信號到控制部分,控制各個部分的啟動和停止,系統(tǒng)運行的各個狀態(tài)的檢測等。控制部分發(fā)出控制信后、自動控制、發(fā)電機的啟動和控制、偏航的控制、溫度的控制、以及其他的控制等都是由控制系統(tǒng)來完場。
二、風電機組的項目和PLC的控制梯形圖
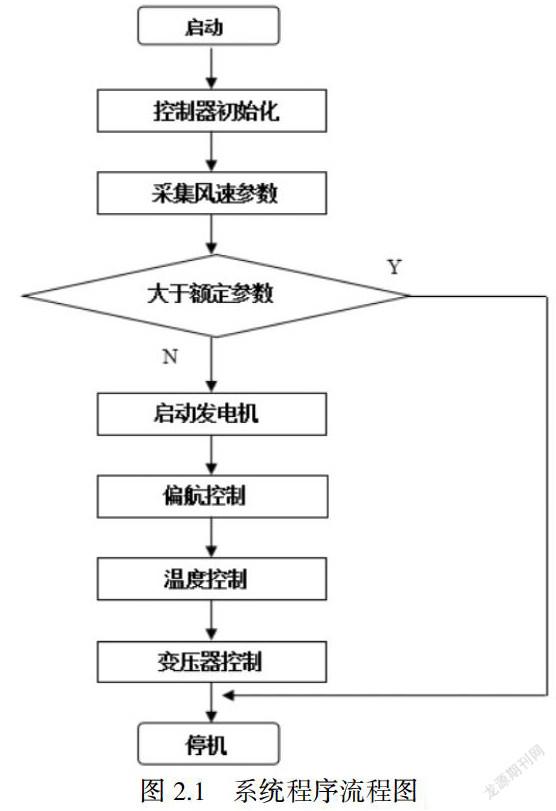
(一)系統(tǒng)流程
可編程控制器完成初始化過程后,風速的模擬信號被傳感器接受,之后轉(zhuǎn)變信號輸入到PLC中。處理中心對所接受的信號進行相應的處理及分析,如果判斷風速值在額定參數(shù)范圍中,發(fā)出啟動電機指令;如果風速超過了額定參數(shù)范圍,停止報警。發(fā)起發(fā)動機之后,與此同時,溫度傳感器、風向傳感器、測速傳感器將所得到的數(shù)據(jù)輸送到PLC(S7-200)進行分析。PLC在分析后會得出一個結(jié)果,然后就按照分析結(jié)果進行運行。例:發(fā)生突發(fā)情況,沙塵暴等較大的風,測速傳感器的信號傳送到PLC,PLC 分析后發(fā)出相應的措施。
控制系統(tǒng)的方式為順序控制和中斷控制。偏航系統(tǒng)的自動控制:用來控制風輪的轉(zhuǎn)向;因為風向的不固定性,為了更好地收集風能。也能防止線纜纏繞。
1、溫度的模糊控制:機艙和塔架的溫度需要控制在一個額定范圍。
(二)偏航控制
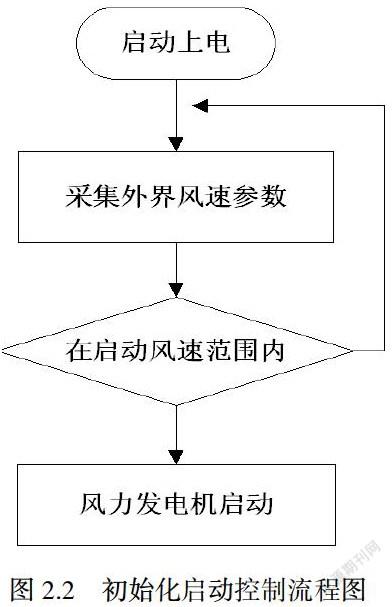
發(fā)電機的啟動:風速傳感器收集到的風發(fā)送到PLC,風速不適合發(fā)電時,則報警關(guān)閉。適合發(fā)電就正常啟動。
偏航控制(內(nèi)部裝置伺服電機和偏航減速齒輪):啟動后傳感器采集風速,在范圍內(nèi)啟動,發(fā)電機啟動,不在范圍內(nèi)的話就不啟動。
風向傳感器收集風的同時也在感測風向,風輪垂直風向,收集的風能越大。
感測到風向后將信號傳送到PLC,進行運算出夾角,與參定值進行比較;不符合后PLC向偏航的機構(gòu)發(fā)出指令,調(diào)整機艙的角度。
偏航電機采用的是三相異步電機。電動機的工作頻率與齒輪的齒數(shù)有關(guān),偏轉(zhuǎn)10度,需要30秒的偏轉(zhuǎn)時間。根據(jù)角度來具體調(diào)整偏航。但是得設(shè)定一個范圍區(qū)。
例:角度180度時:設(shè)置170度至190之間為誤差范圍區(qū);
角度<155度時:設(shè)置150至160之間為誤差范圍。
溫度控制:高溫超過額定自會影響設(shè)備元器件,嚴重可能會損壞。控制升溫以防超過額定值,檢測器如果顯示超過,冷卻機啟動降溫。溫度在范圍內(nèi)則正常啟動。
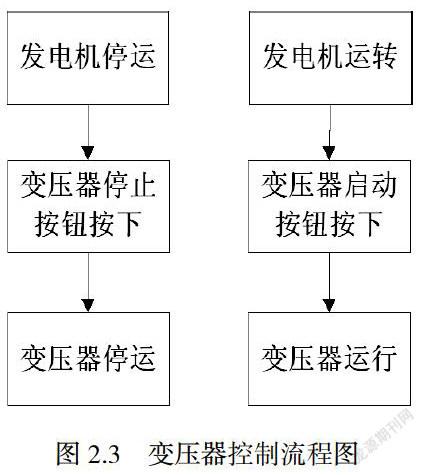
變壓器:將發(fā)電機產(chǎn)生的電壓轉(zhuǎn)化為標準的電壓。一般為高壓,能更好的輸送電壓。電壓的過高或者過低會影響線路的負載。
【參考文獻】
[1]趙勇強.風力發(fā)電技術(shù)發(fā)展狀況與趨勢分析[J].中國科技產(chǎn)業(yè),2006:69-71.
[2]蘇紹蜀.風力發(fā)電機設(shè)計及運行維護[M].北京:中國電力出版社,2007:1-8.
[3]李勇東.風力發(fā)電的發(fā)展現(xiàn)狀和前景[J].電氣時代,2008(3):15-19.
[4]王新坤.風力發(fā)電機偏航系統(tǒng)控制[D].內(nèi)蒙古科技大學,2005.
[5]唐利忠.風力偏航系統(tǒng)的設(shè)計與控制[D].華北電力大學科技學院機械工程系,2011.
猜你喜歡
東方教育(2016年13期)2017-01-12 22:44:43
中小企業(yè)管理與科技·上旬刊(2016年12期)2017-01-05 00:09:51
科學與財富(2016年29期)2016-12-27 13:52:53
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:14:17
中國市場(2016年32期)2016-12-06 11:06:23
價值工程(2016年31期)2016-12-03 00:07:43
中小企業(yè)管理與科技·下旬刊(2016年11期)2016-11-18 08:18:07
科技視界(2016年16期)2016-06-29 17:02:02
商(2016年12期)2016-05-09 10:38:04
科技視界(2016年8期)2016-04-05 08:56:22
