三維激光掃描技術在道路測繪中的應用
2020-09-10 12:29:21詹軍付強
中國新技術新產品 2020年13期
詹軍 付強

摘 ?要:三維激光掃描技術作為一種快速實景復制技術,是測繪領域的一次技術革新,它通過全景化的快速測量方法獲取高分辨率、精細的地理空間對象表面的三維點云數據,為建立精細的三維實體模型提供了必備的數據基礎。該文以三維激光掃描技術在昌平區路側停車項目中景文屯路的施測過程為例,詳細地介紹了三維激光掃描作業的全過程,并對數據據進行對比分析,從而確定三維激光掃描技術的應用場景。
關鍵詞:三維激光掃描;點云去噪;點云拼接;點云配準
中圖分類號:P204 ? ? ? ? ? ? 文獻標志碼:A
0 引言
三維激光掃描技術是國內近期發展的一項高新技術,為空間信息的獲取提供了全新的技術方法,三維激光掃描技術與全站儀測量技術、近景攝影測量技術相比,有非接觸測量、數據采樣率高、分辨率高、全景畫等優點,其應用于測繪領域,為廣大科研人員和工程技術人員提供了一種全新的解決問題的手段,為工程與科學研究提供了更準確的數據,是測量方式的一次創新[1]。
1 三維激光掃描技術基本原理
三維激光掃描系統主要由三維激光掃描儀、計算機、電源供應系統、支架以及系統配套軟件構成。其最主要的組成部分之一三維激光掃描儀,由激光發射器、接收器、時間計數器、馬達控制可旋轉的濾光鏡、控制電路板、微電腦、CCD相機以及軟件等構成三維掃描儀的測距和測角等系統。激光測距方法主要有基于測距法、相位測距法、激光三角法、脈沖-相位式測距法等四種類型,目前測繪領域所使用的三維激光掃描儀中脈沖測距法使用居多。通過測角系統獲取掃描儀至待測物體的水平角和垂直角,進而計算出待測物體的三維坐標信息。
三維激光掃描儀在記錄激光點三維坐標的同時也會將激光點位置處物體的反射強度值記錄下來,內置數碼相機的掃描儀在掃描過程中可以方便、快速地獲取外界物體真實的色彩信息,在掃描、拍照完成后,我們不僅可以得到點的三維坐標信息,也獲取了物體表面的反射率信息和色彩信息。所以包含在點云信息里的不僅有X、Y、Z、Intensity,還包括每個點的RGB數字信息。點云數據的空間排列形式以線掃描點云居多,采用逐行(或列)的掃描方式,獲得的三維激光掃描點云數據具有一定的結構關系[2]。
2 點云數據獲取與處理
2.1 數據獲取
三維掃描數據獲取主要包含資料搜集與現場踏勘,控制方案設計、掃描方案設計及現場掃描過程等內容,
掃描控制方案主要為外業掃描服務,其目的主要包含兩個:其一是實現不同控制坐標系之間的轉化;其二是實現不同視角,尤其是涉及不通視或者相鄰掃描數據重疊度低的時候,不同坐標系掃描數據的拼接。
掃描方案應包含控制網、掃描設備選擇、站點布設圖、掃描順序、擬站點掃描密度等。掃描設備主要參數包含最遠掃描范圍、角度分辨率及點位精度、掃描速度、激光安全登記以及反射率等。
2.2 數據處理
2.2.1 點云去噪
點云的噪聲去除是點云預處理的關鍵操作之一,噪聲去除的目標即是要去除不相關的目標,得到“干凈”的目標點云。在作業過程中,最常見的噪聲主要有環境噪聲和目標噪聲等。在實際數據處理中,一般按照不同尺度的噪聲進行濾除,首先按照順序將數據環境噪聲去除,環境噪聲去除后可以降低分析數據的范圍和數據量,然后再去除目標噪聲即可。
2.2.1.1 環境噪聲去除
在環境噪聲去除中,大多數是依靠手工去除的辦法,并結合給噪聲設置閥值進行采用由遠及近、由小到大的策略進行半自動化噪聲濾除。首先掃描對象邊緣遠處的目標返回點,通過距離閾值來進行濾除;其次,對對掃描區域內數據做空間柵格劃分并聚類點集,將小尺度目標去除,對于掃描區域內的移動目標,常采用孤立線性點集的自動濾除算法來實現。
對于比較明顯的噪聲數據,可采取手工刪除的方法剔除。
2.2.1.2 目標噪聲去除
由于三維激光掃描儀獲取的點云數據量比較大且目標噪聲一般在目標點云的表面,一般可用系統自動判斷的方法進行處理。其常用方法有弦高法、距離值法和曲率法等。思路都是基于給定的閾值,如果點數據大于閾值則判斷為異常點,各方法之間的差異在于選取的度量值不同。曲率法判斷的依據為點與相鄰點之間的矢量夾角;弦高法根據點與相鄰點連線的距離判斷;距離值法是先將點與相鄰點之間擬合為直線段或平面,然后對點到擬合線或平面之間的距離進行判斷。
2.2.2 點云拼接
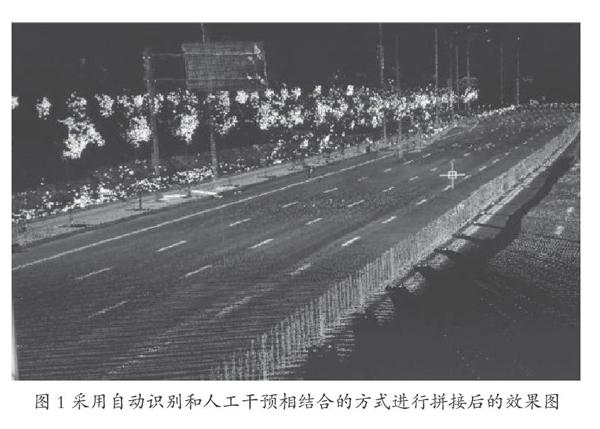
因掃描儀掃描視距的限制,開展外業掃描工作均不能一站完成,而是要設立多個測站對掃描目標進行全方位,有重疊度的掃描。這就需要將多個測站的數據進行統一拼接處理,使之成為方便內業處理的一個完整的全景圖或幾個分塊圖,即點云的拼接,點云的拼接是通過獲取2個或多個標靶的中為位置進行。利用TopoDOT、EPS等點云數據軟件,通過電腦自動識別的方式標定平面標靶或球狀目標進行有效的拼接,對于無法實現自動提取的則應采用手工的方式認為標定重心的位置[1]。圖1為采用自動識別和人工干預相結合的方式進行拼接后的效果圖。
2.2.3 坐標配準
掃描站點是三維激光掃描儀在一個固定的位置上進行掃描所獲取的全部點云數據及相關的控制數據。掃描過程中儀器是固定的,所以一個掃描站中的所有書籍都是統一以掃描設備為中心的局部坐標系單站數據,站點是點云進行配準的基本單位。
配準方式分為逐站配準與整體配準2類,其中逐站配準即為兩兩相鄰站點之間不斷配準合并,最后得到整體的數據模型。
整體配準的方式就是以某一站為基礎,解算所有站點到基站的空間變換參數,得到配準模型,這樣可以一次性完成配準過程,無誤差累積,整體精度高[3]。
2.2.4 點云抽稀
點云抽稀常用的方法有系統抽稀方法、基于格網的抽稀方法、基于TIN的抽稀方法、基于坡度的抽稀方法及基于流處理的抽稀方法等。
根據獲取數據的情況及工程的大小,在進行導入繪圖平臺進行要素提取前,還需要進行光滑、切割等多種操作。
2.2.5 道路要素提取
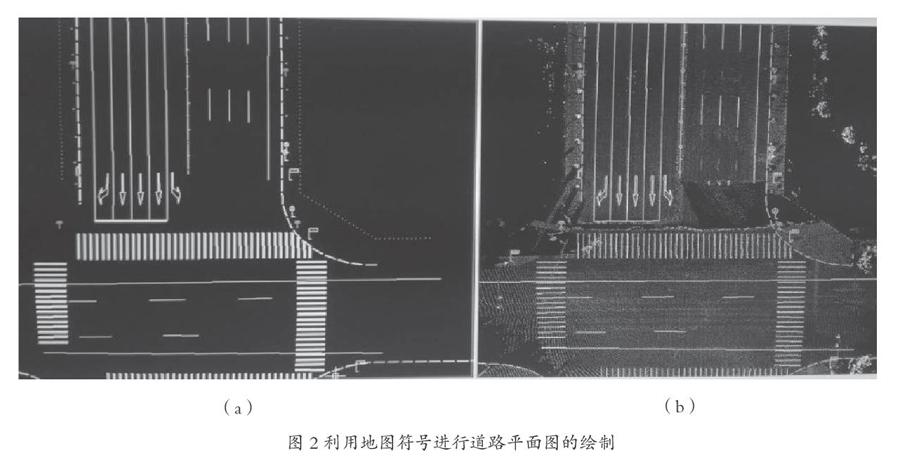
在該案例中,數據處理采用EPS點云數據平臺進行作業,將處理后的點云數據導入EPS系統,利用地圖符號進行道路平面圖的繪制,如圖2所示。在該項目中,要求將道路的已有車位線、斑馬線、隔離帶、綠化帶、道路兩側步道,道路兩側污水篦子和道路兩側樹木等情況進行詳細測繪描述,因三維激光掃描技術以全景復制的方式進行掃描,路中的每一個要素均被記錄下來,為后續成圖提供了方便。
3 精度分析
為了驗證三維掃描的精度,將配準得到的標靶坐標與用全站儀測量的坐標值進行對比分析,其數據結果見表1(為了計算方便,坐標統一進行平移)。
由表2統計算得出其平面點位中誤差為2.2 mm,高程中誤差為4.3 mm,滿足普通道路測量的精度要求。
6 結論
三維激光掃描技術在測繪工程中的應用越來越廣泛,將其應用到道路工程具有較好的實用價值,同時也為道路、公路等線狀工程的特征檢驗提供了新的方法。利用三維掃描的方式進行作業,不受時間的限制可全天候進行掃描,外業投入的人員較少,得到的數據為全景復制,信息非常全面,對于開展場地復雜,要求采集內容較多的項目,能達到事半功倍的效果。但在進行外業掃描時,受到視線長度的限制,各測站之間需要50%以上的重疊度。如果在空曠地區,采集內容較為稀疏的項目則不建議使用。
參考文獻
[1]王宴民,黃明,王國利.地面激光雷達與攝影測量三維重建[M].北京:科學出版社,2018.
[2]盧其垡.三維激光掃描技術在古建筑測繪中的應用[J].北京測繪,2020,34(5):623-627.
[3]曹建軍.三維激光掃描技術在市政道路工程斷面測量中的應用[J].測繪與空間地理信息,2020,43(4):108-109,113.
