基于模糊邏輯和機動檢測的AGIMM跟蹤算法
2020-09-07 00:30:50雷迎科
空軍工程大學(xué)學(xué)報 2020年4期
邵 堃, 雷迎科
(國防科技大學(xué)電子對抗學(xué)院, 合肥,230037)
隨著信號處理技術(shù)研究的日益深入和成熟,目標跟蹤在導(dǎo)彈防御、戰(zhàn)場監(jiān)視、港口避碰、交通管制、車輛導(dǎo)航和機器視覺等許多軍事和民用領(lǐng)域都扮演著重要的角色,而目標模型的選擇又是上述技術(shù)中不可或缺的重要組成部分。目前卡爾曼濾波算法、擴展卡爾曼濾波(Extended Kalman Filter,EKF)算法和無跡卡爾曼濾波(Unsented Kalman Filter,UKF)算法等經(jīng)典的跟蹤算法[1-2]只適用于單一數(shù)學(xué)模型描述的目標機動形式,在實際應(yīng)用中,由于目標具有多階段機動特性且機動參數(shù)很難獲得,因此傳統(tǒng)的單模型算法很難完整地描述目標的機動特性。為了解決該問題,Blom和Bar-Shalom[3]提出了一種具有Markov切換系數(shù)的交互式多模型(Interacting Multiple Model,IMM)算法,并在目標跟蹤領(lǐng)域得到了廣泛應(yīng)用和發(fā)展[4-10]。
但是IMM算法的跟蹤性能在很大程度上依賴所選取的模型集[11-12],為了提高算法的跟蹤精度,就要使模型盡可能地覆蓋目標運動的全過程,但較多的模型不但會增加計算量而且可能產(chǎn)生模型競爭使算法跟蹤效果下降。為了解決這個問題,變結(jié)構(gòu)交互多模型算法(Variable Structure Interacting Multiple Model,VSIMM)[13-17]被提出,文獻[18]提出的基于協(xié)同轉(zhuǎn)彎(Coordinate Turn,CT)模型的自適應(yīng)網(wǎng)格交互多模型(Adaptive Grid Interacting Multiple Model,AGIMM)算法是VSIMM 算法的一種,AGIMM算法克服了傳統(tǒng)IMM算法運用協(xié)同轉(zhuǎn)彎模型(Coordinate Turn,CT)[19]時必須知道真實轉(zhuǎn)彎率這一難點,因此AGIMM算法可以用較少的運動模型完成對機動形式復(fù)雜目標的有效跟蹤,目前以協(xié)同轉(zhuǎn)彎模型為基礎(chǔ)模型集的AGIMM算法[20]已經(jīng)發(fā)展成為最有效的跟蹤算法之一。
但目前AGIMM系列算法仍存在下列問題:一是AGIMM算法在其網(wǎng)格結(jié)構(gòu)調(diào)整時過多地依賴上一時刻的網(wǎng)格模型,導(dǎo)致在目標不進行機動的階段算法的模型集收斂較慢;二是目前機動檢測的方式非常依賴模型的后驗概率和單個模型的殘差信息[21]。由于目標機動、存在觀測誤差和模型不準確等原因,目標的真實運動模式不總出現(xiàn)在最接近最大模型概率對應(yīng)的模型處,因此容易產(chǎn)生錯誤的機動檢測結(jié)果。本文針對上述存在的問題提出基于模糊邏輯和機動檢測的AGIMM(AGIMM Tracking Algorithm Based on Fuzzy Logic and Maneuvering Detection,F(xiàn)LMD-AGIMM)跟蹤算法,首先通過模糊邏輯算法自適應(yīng)地得到機動檢測可信度,然后利用機動檢測可信度信息、目標的機動信息和模型后驗概率信息重新給出網(wǎng)格結(jié)構(gòu)調(diào)整方式,提高模型的收斂速度。仿真表明,改進的算法相對于AGIMM算法加快了模型集的收斂速度,提高了目標跟蹤精度。
1 協(xié)同轉(zhuǎn)彎跟蹤模型

X(k+1)=FX(k)+GW(k)
(1)
式中:
2 AGIMM 算法
ωC(k+1)=μL(k)ωL(k)+μC(k)ωC(k)+
μR(k)ωR(k)
(2)
每次循環(huán)后算法中模型的角速度都會得到更新,左邊模型和右邊模型是在中間模型的基礎(chǔ)上根據(jù)模型的后驗概率、最小網(wǎng)格間距以及探測閾值來更新的,具體的AGIMM算法網(wǎng)絡(luò)調(diào)整方式見文獻[20]。
3 FLMD-AGIMM算法
由于AGIMM算法對模型進行調(diào)整時過分依賴前一時刻的網(wǎng)格結(jié)構(gòu),導(dǎo)致模型集收斂速度較慢。本文提出的FLMD-AGIMM算法是通過模糊邏輯算法自適應(yīng)地將機動檢測信息引入AGIMM算法的模型調(diào)整過程中,即利用機動檢測可信度信息、模型后驗概率和目標的機動信息重新給出模型的網(wǎng)格結(jié)構(gòu)調(diào)整方法。
3.1 基于模糊邏輯的機動檢測
傳統(tǒng)的機動檢測方法是根據(jù)預(yù)測的殘差信息對目標是否機動進行檢測,因為殘差作為濾波算法中的后驗信息充分反映了目標當(dāng)前時刻的狀態(tài)變化。AGIMM算法中有3個子模型,k時刻濾波得到的殘差分別為v1(k)、v2(k)和v3(k),求k時刻最大后驗概率max(μk)對應(yīng)的殘差的范數(shù)。
(3)
式中:S(k)為殘差的協(xié)方差。
S(k)=H(k)P(k|k-1)HT(k)+R(k)
(4)
Dj(k)服從量測維數(shù)值的χ2分布,根據(jù)χ2分布性質(zhì),設(shè)置門限值M,若Dj(k)>M,則目標發(fā)生機動,反之目標不發(fā)生機動。目標發(fā)生機動的典型概率值取0.01時,M=7;目標發(fā)生機動的典型概率值取0.1時,M=3。
但上述機動檢測方法非常依賴模型的后驗概率和單個模型的殘差信息。當(dāng)目標運動狀態(tài)改變和存在誤差時,每次濾波得到的最大模型概率對應(yīng)的模型并不總是最接近目標真實運動模式的模型,若根據(jù)最大后驗概率對應(yīng)模型的殘差信息進行機動檢測容易產(chǎn)生錯誤的結(jié)果,因此引入模糊邏輯理論對機動檢測可信度進行計算,在模型的網(wǎng)格結(jié)構(gòu)調(diào)整過程中加入機動檢測可信度信息。
模糊邏輯算法[23-24]的基本思想是通過原始的邏輯語言形式,通過一組模糊規(guī)則模擬人的經(jīng)驗和邏輯,在提出的FLMD-AGIMM算法中采用模糊控制器的目的是計算單模型殘差信息的機動檢測可信度,首先確定模糊輸入變量:最大后驗概率μmax(k)和模型網(wǎng)絡(luò)間距Δω,Δω計算方式見式(5):
(5)
μmax(k)屬于模糊集{小,中,大};Δω屬于模糊集{很小,小,中,大},由大量實驗積累的經(jīng)驗得到各輸入變量對應(yīng)的隸屬度函數(shù)如圖1所示。
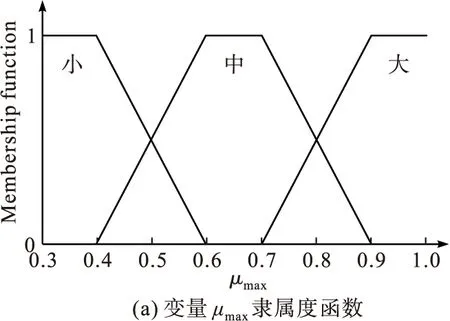
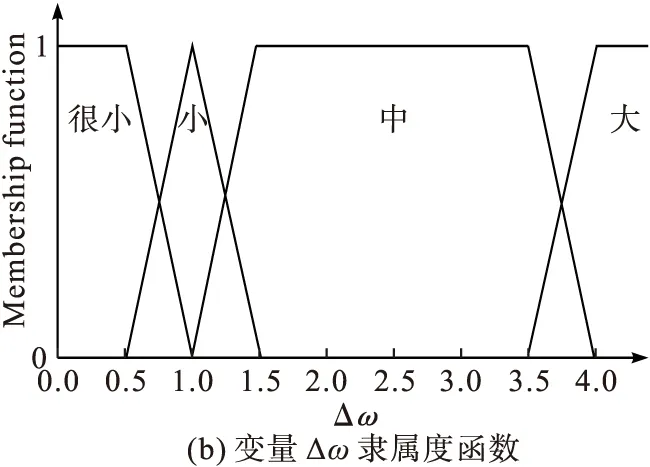
圖1 輸入變量的隸屬度函數(shù)
FLMD-AGIMM算法中包含3個模型,最大后驗概率μmax(k)對應(yīng)的是該時刻最接近目標真實運動狀態(tài)的模型,當(dāng)存在觀測誤差、模型不準確和模型競爭等情況時,該對應(yīng)方式可能出現(xiàn)偏差。Δω表示FLMD-AGIMM算法3個模型的離散程度,即網(wǎng)格大小,若Δω很小時,3個網(wǎng)絡(luò)模型參數(shù)很接近,此時3個模型的殘差信息相差不大,因此利用最大后驗概率對應(yīng)的模型的殘差信息進行機動檢測結(jié)果是可信的。根據(jù)經(jīng)驗制定模糊規(guī)則,模糊控制器的推理過程可以采用Takagi-Sugeno (TS)模型具體表述為:
Ifμmax(k)is A anddis B, thenP(k) is C,
k=1,2,…,l
根據(jù)輸入輸出變量的含義以及經(jīng)驗知識可得到如下結(jié)論: 若最大后驗概率μmax(k)很小且模型網(wǎng)絡(luò)間距Δω很大,則根據(jù)最大后驗概率μmax(k)對應(yīng)模型的殘差信息得到的機動判決結(jié)果可信度很小,P(k)可以視為0,以此類推可得到其他模糊邏輯規(guī)則,具體見表1,輸出變量對應(yīng)的隸屬度見圖2。在對模糊控制器的輸出進行解模糊化時,采用中位數(shù)法進行解模糊化,得到機動檢測的具體可信度。
當(dāng)模糊匹配輸出的機動檢測可信度P(k)為[0,0.4)時不進行機動檢測;當(dāng)輸出概率為(0.4,0.6]可能進行機動檢測;當(dāng)輸出概率為(0.6,1]進行機動檢測。
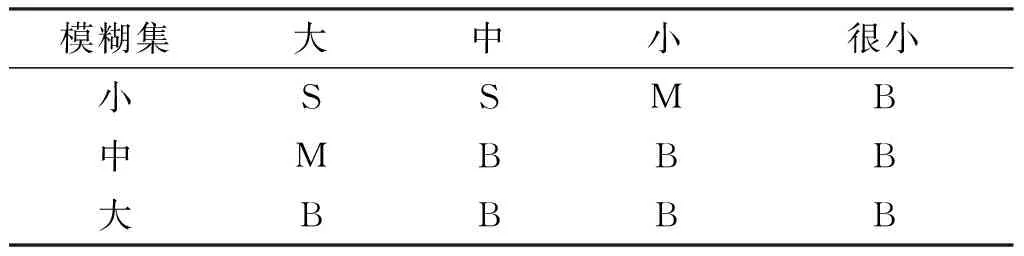
表1 系統(tǒng)模糊邏輯規(guī)則
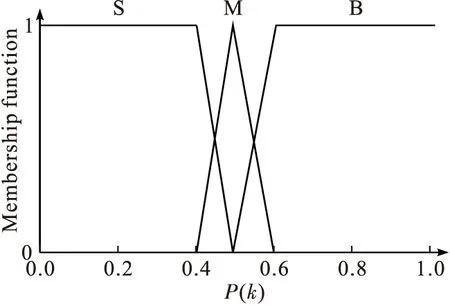
圖2 輸出變量的隸屬度函數(shù)
3.2 網(wǎng)格模型調(diào)整
首先設(shè)定一個閾值T,若P(k)≤T,說明機動檢測信息的可信度較低,此時根據(jù)后驗概率μ(k)在原網(wǎng)格模型的基礎(chǔ)上調(diào)整網(wǎng)格中心。
ωC(k+1)=μL(k)ωL(k)+μC(k)·
ωC(k)+μR(k)ωR(k)
(6)
根據(jù)后驗概率、設(shè)定模型探測閾值t1、t2和最小網(wǎng)格間距δ1調(diào)整左邊模型和右邊模型,其中t1∈[0,1]、t2∈[0,1]。
1)當(dāng)max(μk)=μC(k)時:
(7)
(8)
式中:λ1=max{ωC(k)-ωL(k),δ1};λ2=max{ωR(k)-
ωC(k),δ1};t1取一個很小的值。
2)當(dāng)max(μk)=μL(k)時:
(9)
式中:t2取一個較大的值。
ωR(k+1)=ωC(k+1)+λ2
(10)
3)當(dāng)max(μk)=μR(k)時:
(11)
ωL(k+1)=ωC(k+1)-λ2
(12)
若P(k)>T,說明機動檢測信息的可信度較高,此時將機動檢測信息加入模型調(diào)整過程,加快模型收斂速度。
1)當(dāng)μmax(k)=μC(k)時,即最大概率是中心模型。
若DC(k)>M,則認定目標進行了機動。根據(jù)后驗概率μ(k)在原網(wǎng)格模型的基礎(chǔ)上調(diào)整網(wǎng)格中心。
ωC(k+1)=μL(k)ωL(k)+μC(k)ωC(k)+
μR(k)ωR(k)
(13)
在調(diào)整左右兩邊的模型時加入目標的機動信息,若模型殘差值大,則說明目標進行了較強的機動,則增加網(wǎng)格探測范圍,反之減小網(wǎng)格探測范圍。
(14)

若DC(k)≤M,則認定目標不發(fā)生機動,證明目標的運動較穩(wěn)定,所以此時充分相信后驗概率μ(k),加快模型集的收斂速度。
ωC(k+1)=ωC(k)
(15)
在調(diào)整左右兩邊的模型時,依據(jù)各自模型對應(yīng)的后驗概率值的大小,在原有網(wǎng)格間距的基礎(chǔ)上,若左邊模型概率小則減小左邊探測區(qū)域,反之增加網(wǎng)格探測區(qū)域。
ωL(k+1)=ωC(k+1)-γL[1-μR(k)]
(16)
若右邊模型概率小則減小網(wǎng)格右邊探測區(qū)域,反之增加網(wǎng)格探測區(qū)域。
ωR(k+1)=ωC(k+1)+γR[1-μL(k)]
(17)
式中:γL=max{ωC(k)-ωL(k),δ3};γR=max{ωR(k)-ωC(k),δ3},δ3為最小網(wǎng)格間隔。
2)μmax(k)=μL(k)時,即最大概率是左邊模型。

若DL(k)≤M,則認定目標不發(fā)生機動。根據(jù)后驗概率重新調(diào)整模型中心點:
ωC(k+1)=ωL(k)
(18)
在調(diào)整左邊的模型時,在原有網(wǎng)格間距的基礎(chǔ)上,若左邊模型后驗概率大則增加左邊探測區(qū)域,反之減小網(wǎng)格探測區(qū)域。
ωL(k+1)=ωC(k+1)-γL[1-μR(k)]
(19)
右邊模型網(wǎng)格間距如式(20)所示:
ωR(k+1)=ωC(k+1)+γR
(20)
3)當(dāng)μmax(k)=μR(k)時,即最大概率是右邊模型。

若DR(k)≤M,則認定目標不發(fā)生機動。根據(jù)后驗概率重新調(diào)整模型中心點:
ωC(k+1)=ωR(k)
(21)
左邊模型網(wǎng)格間距為:
ωL(k+1)=ωC(k+1)-γL
(22)
計算右邊模型時,在原有網(wǎng)格間距的基礎(chǔ)上,若右邊模型后驗概率大則增加右邊探測區(qū)域,反之減小網(wǎng)格探測區(qū)域。
ωR(k+1)=ωC(k+1)+γR[1-μL(k)]
(23)
4 仿真實驗及結(jié)果分析
系統(tǒng)的量測方程可以建立在目標與觀測站徑向距離r、目標相對觀測站的俯仰角β、方位角α可以測量的基礎(chǔ)上。
Z(k+1)=H[X(k+1),k+1]+V(k+1)
(24)
式中:H[X(k+1),k+1]=[r(k+1)α(k+1)β(k+1)]T。
(25)
式中:V(k+1)為量測噪聲,其協(xié)方差矩陣為:
(26)
4.1 目標運動軌跡
4.1.1 軌跡1

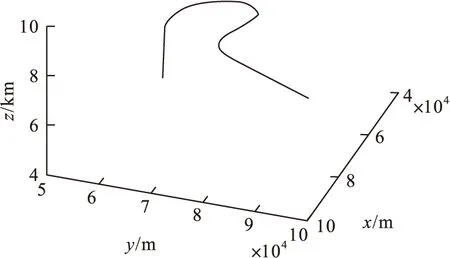
圖3 目標運動軌跡1
4.1.2 軌跡2

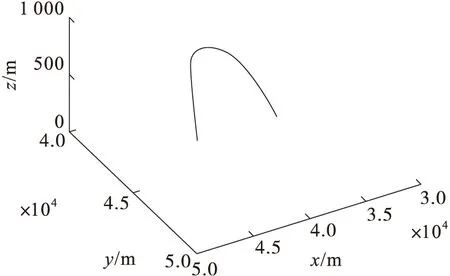
圖4 目標運動軌跡2
4.1.3 軌跡3
為驗證算法對高速運動目標的跟蹤性能,以文獻[20]中的X-51A導(dǎo)彈軌跡為例,目標的初始位置為[600 km,30 km,1 km],初始速度[-1 800 m/s,0 m/s,0 m/s],第1階段t=0~20 s,目標做直線運動,x軸方向機動加速度為0 m/s2,y軸方向機動加速度為9.8 m/s2;第2階段t=21~380 s,目標做勻速轉(zhuǎn)彎運動,角速度為5.6°/s;第3階段t=381~400 s目標在x方向機動加速度為0,y方向機動加速度為-9.8 m/s2。
4.2 算法性能對比
用目標狀態(tài)估計值的均方根誤差(Root Mean Square Error, RMSE)[25]為性能指標來衡量本文提出算法的性能。
(26)
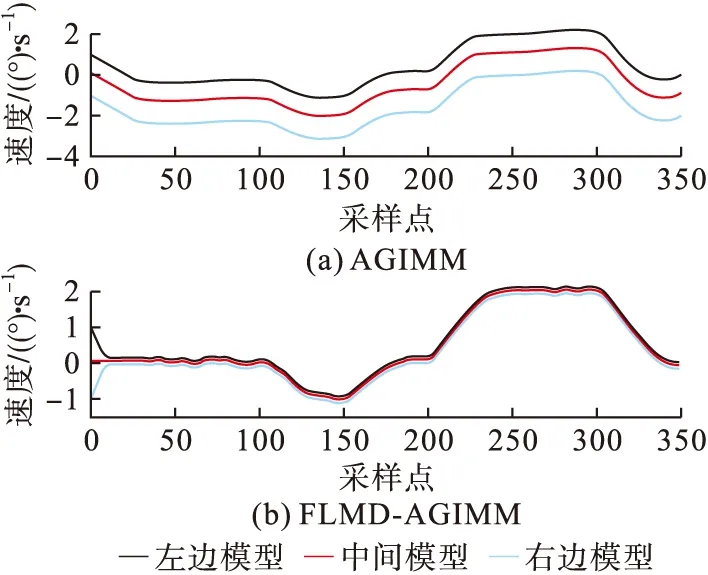
圖5 模型角速度變化對比
圖5仿真結(jié)果表明,F(xiàn)LMD-AGIMM算法模型角速度的收斂速度明顯快于AGIMM算法,當(dāng)目標運動狀態(tài)穩(wěn)定時,F(xiàn)LMD-AGIMM算法可以快速調(diào)整模型網(wǎng)格中心點,并且根據(jù)模型后驗概率使左邊模型和右邊模型迅速收斂。
2)仿真2:分別將軌跡1、軌跡2和軌跡3作為實驗的目標運動軌跡,比較IMM算法和AGIMM算法和FLMD-AGIMM算法的跟蹤性能,其中IMM算法包括勻速直線運動(Constant Velocity, CV)模型、勻加速運動(Constant Acceleration, CA)模型和CT模型。實驗量測噪聲的標準差為σr=100 m,σα=σβ=0.2°,對目標2跟蹤時采樣間隔為0.5 s,對目標1和目標3采樣間隔為1 s,其余實驗參數(shù)同實驗1。仿真結(jié)果見圖6~8。
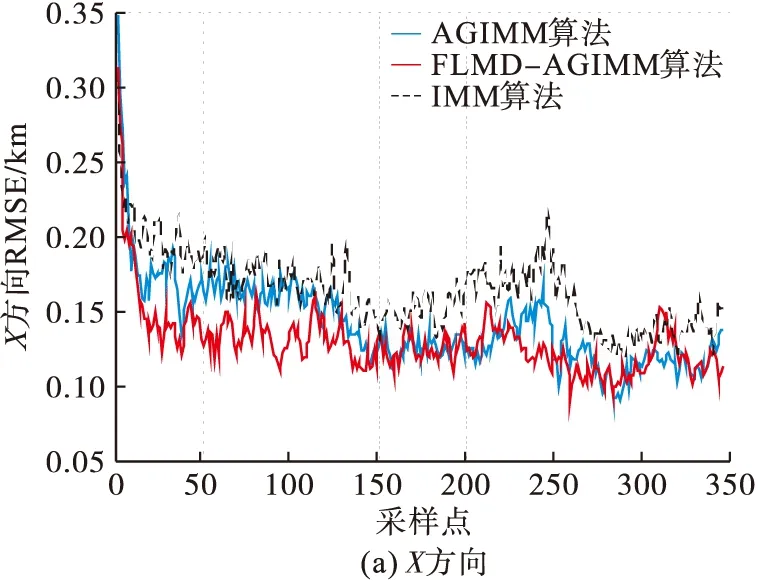
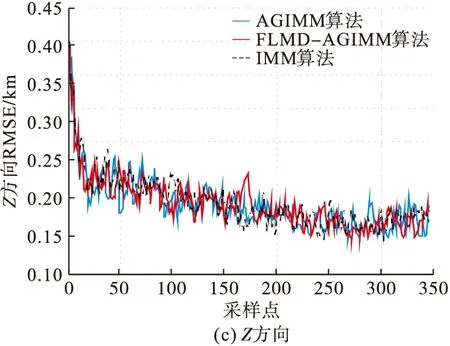
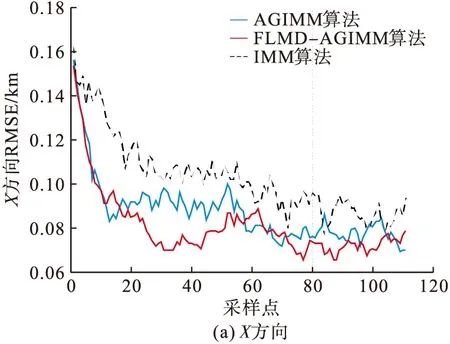
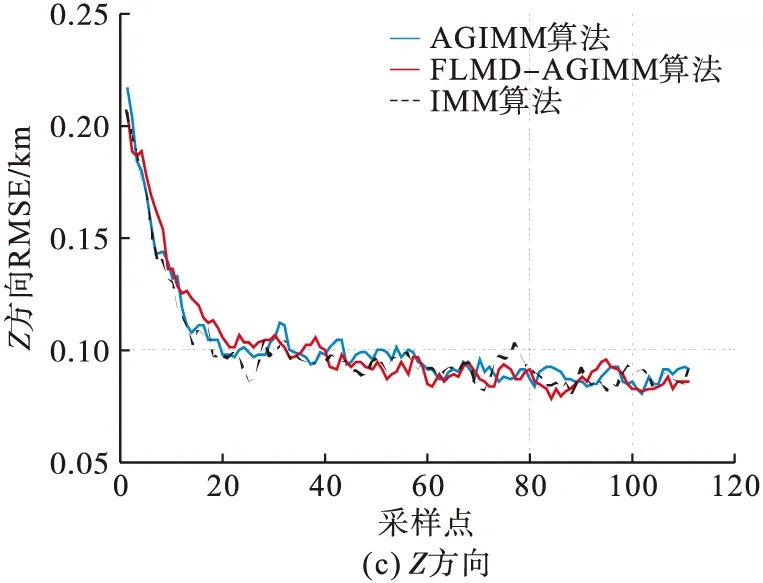
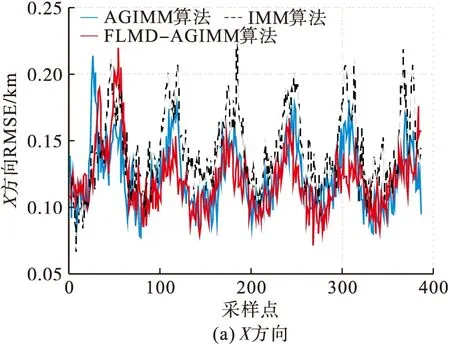
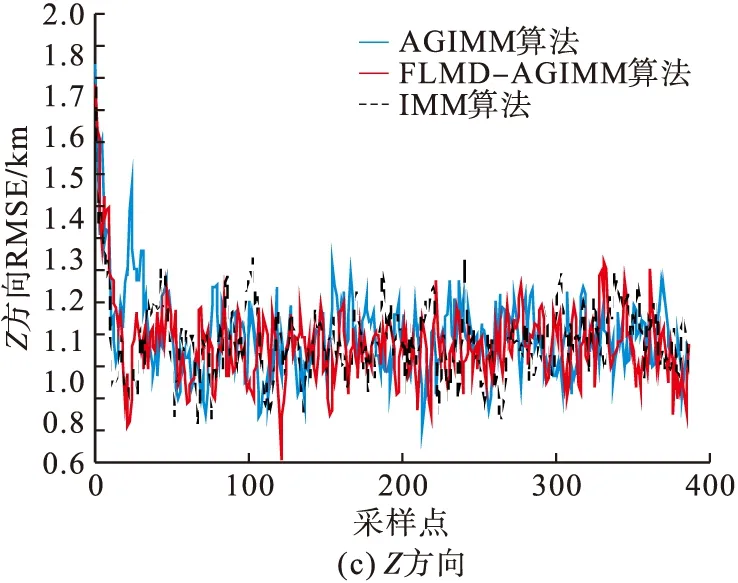
如圖所示,當(dāng)目標在機動狀態(tài)發(fā)生改變時,IMM算法由于其模型參數(shù)固定導(dǎo)致算法跟蹤精度變低,如圖6中的第120個采樣點附近、第180個采樣點附近,圖7中第40個采樣點附近。而AGIMM算法和FLMD-AGIMM算法的網(wǎng)絡(luò)結(jié)構(gòu)可以自適應(yīng)地改變,因此能保持較好的跟蹤精度,但由于AGIMM算法的網(wǎng)絡(luò)模型調(diào)節(jié)效率較慢限制了其跟蹤精度。由圖6~8可以看出,無論是對目標1、目標2還是目標3進行跟蹤,F(xiàn)LMD-AGIMM算法的跟蹤性能都優(yōu)于IMM算法和AGIMM算法。
3)仿真3:選擇軌跡1作為實驗的目標運動軌跡,在不同量測條件下,比較IMM算法和AGIMM算法和FLMD-AGIMM算法的跟蹤性能,條件如表2所示,其他參數(shù)同實驗2,結(jié)果如表3所示。
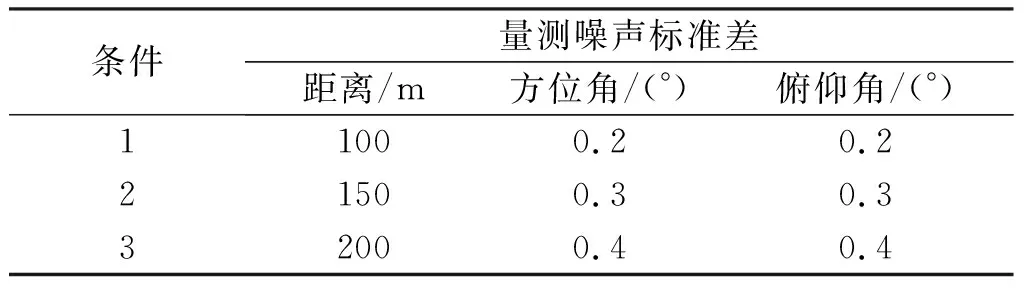
表2 量測噪聲標準差
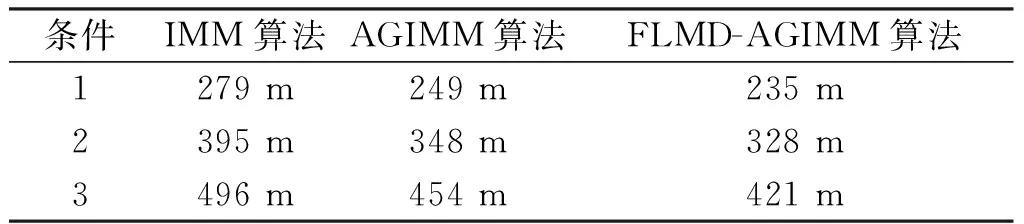
表3 3種算法的平均位置RMSE比較
4)仿真4:選擇軌跡1作為實驗的目標運動軌跡,在不同初始模型條件下,比較FLMD-AGIMM算法和AGIMM算法的跟蹤性能,初始模型集參數(shù)如表4所示,量測噪聲的標準差為σr=100 m,σα=σβ=0.2°,其他條件與仿真1相同。
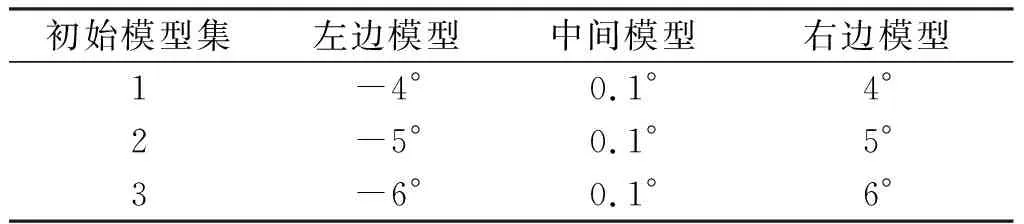
表4 不同初始模型集參數(shù)
由表5結(jié)果可以看出隨著初始模型集的網(wǎng)格間距變大AGIMM算法的跟蹤性能隨之降低,而FLMD-AGIMM算法的跟蹤性能仍能保持在較好的水平,這得益于FLMD-AGIMM算法中改進的模型網(wǎng)格調(diào)整方式,當(dāng)目標在非機動情況下模型集可以快速與真實目標運動模式匹配,使算法可以較少地受初始模型集的影響。
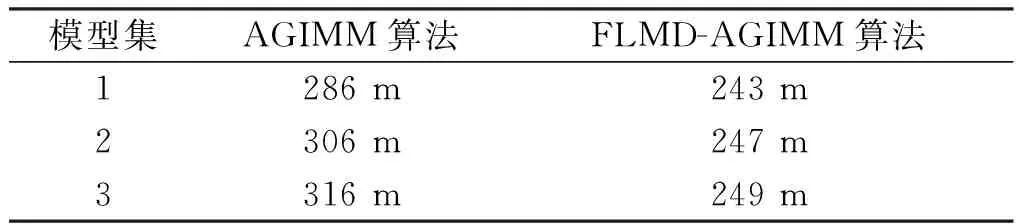
表5 2種算法在不同模型集下的平均位置RMSE比較
5 結(jié)語
針對AGIMM算法網(wǎng)格模型收斂速度慢和機動檢測方法過于依賴單個模型后驗概率的問題,本文提出了FLMD-AGIMM算法。該算法首先通過模糊邏輯算法對單模型機動檢測可信度進行檢測,然后利用機動檢測可信度信息調(diào)整網(wǎng)絡(luò)結(jié)構(gòu),克服了機動檢測方法受觀測誤差、模型競爭和模型不準確等因素的影響;當(dāng)機動檢測可信時通過目標的機動信息和模型的后驗概率重新給出了在機動檢測時模型網(wǎng)格的調(diào)整方法,解決了AGIMM算法網(wǎng)格模型收斂速度慢的問題。仿真結(jié)果表明,相對于AGIMM算法,本文所提出的算法具有更快的模型收斂速度和更高的目標跟蹤精度。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12