車路云一體智能網(wǎng)聯(lián)公交系統(tǒng)研究
2020-09-06 14:15:55沈峰
科學與信息化 2020年23期


摘 要 “車路云協(xié)同+智能網(wǎng)聯(lián)技術”是未來公共交通的發(fā)展方向,基于智能網(wǎng)聯(lián)公交系統(tǒng)關鍵技術和行業(yè)應用現(xiàn)狀,本文將智能網(wǎng)聯(lián)公交系統(tǒng)的關鍵場景歸納為全過程的精準調度,全行程的優(yōu)先通行,全路程的安全保障,全旅程的優(yōu)質服務。針對場景需求探究車路云一體智能網(wǎng)聯(lián)公交系統(tǒng)總體解決方案,包含車輛,路側,云控平臺三個子系統(tǒng),研究系統(tǒng)架構和功能設計。本研究對提高公交智能化水平,帶動公共交通產(chǎn)業(yè)技術變革有重要意義。
關鍵詞 車路云協(xié)同;智能網(wǎng)聯(lián);公交系統(tǒng)
Abstract “Cooperative Vehicle Infrastructure +Intelligent Connected Vehicle” is the future development direction of public transportation. Based on the key technologies of the intelligent networked public transport system and industry applications, this paper proposes main scenarios of intelligent networked public transport system, including precise scheduling of the whole process, priority traffic of the whole journey, safety guarantee of the whole journey, and quality service of the whole journey. The overall solution of Intelligent Networked Public Transport System Vehicle Integrated with Vehicle, Road and Cloud was explored according to the scenarios. including three subsystems of vehicle, roadside, and cloud control platform. This paper Elaborates the system architecture and functional. This research is of great significance for improving the level of public transportation intelligence, and driving the technological transformation and acceleration of the public transportation industry.
Key words Cooperative Vehicle Infrastructure; Intelligent connected vehicle; Public transportation system
引言
隨著社會經(jīng)濟的不斷發(fā)展、人們生活水平的普遍提高和機動車的快速增長,城市交通道路網(wǎng)飽和度將持續(xù)升高,交通擁堵問題日益嚴重,大力發(fā)展公眾交通是緩解交通擁堵的重要手段,公交自動駕駛技術的應用和智能化系統(tǒng)的升級對提升公交系統(tǒng)服務質量,提高公交運行效率起著至關重要的作用。
但是現(xiàn)有的公交智能化系統(tǒng)還存在重建設輕調度,信息化發(fā)展不均衡,規(guī)模效應難以充分發(fā)揮等問題。隨著5G、人工智能、物聯(lián)網(wǎng)、云計算等技術的快速發(fā)展,智能交通產(chǎn)業(yè)全面升級,給現(xiàn)有交通體系帶來了顛覆性改變。“車路云協(xié)同+智能網(wǎng)聯(lián)化技術”成為未來公共交通的發(fā)展方向。基于車路云一體化技術的智能網(wǎng)聯(lián)公交系統(tǒng)是提高公交運行效率、提升公交運行的舒適度,帶動公共交通產(chǎn)業(yè)技術變革和加速升級的重要技術手段。
1智能網(wǎng)聯(lián)公交系統(tǒng)發(fā)展現(xiàn)狀
1.1 智能網(wǎng)聯(lián)公交系統(tǒng)關鍵技術
智能網(wǎng)聯(lián)公交系統(tǒng)通過搭載多種傳感器,融合現(xiàn)代通信技術實現(xiàn)對公交行駛道路交通環(huán)境感知。基于通信協(xié)議對感知信息進行融合,實現(xiàn)人-車-路之間的信息共享與交互,控制公交車輛自主安全有序運行。本研究根據(jù)智能網(wǎng)聯(lián)公交系統(tǒng)的需求和發(fā)展現(xiàn)狀,將關鍵技術總結為環(huán)境感知技術,智能決策技術、控制執(zhí)行技術、V2X通信技術,云平臺和大數(shù)據(jù)技術,高精度地圖和高精度定位技術6類。
(1)環(huán)境感知技術
環(huán)境感知主要依賴于各類部署于車載系統(tǒng),路側系統(tǒng) 上的傳感器來完成,通過攝像機,微波雷達,激光雷達等傳感器設備,基于傳感器融合技術感知公交車輛在行駛過程中的自身狀態(tài)信息和外部信息。環(huán)境感知技術是自動駕駛公交邁向車路云協(xié)同一體化發(fā)展的關鍵技術之一,是智能網(wǎng)聯(lián)公交系統(tǒng)的核心組成部分[1-2]。
(2)智能決策技術
智能決策技術指的是運行中的公交車輛根據(jù)所感知的周邊及自身環(huán)境信息,對車輛的運行路徑和駕駛行為做出智能決策的過程。在環(huán)境感知技術基礎上,利用信息融合技術整合各項信息,完成全局路徑規(guī)劃決策,以及局部運行軌跡規(guī)劃和駕駛行為規(guī)劃。車輛智能決策技術在智能網(wǎng)聯(lián)公交系統(tǒng)中承擔著車輛“大腦”的作用[3]。
(3)控制執(zhí)行技術
控制執(zhí)行技術是按照車輛智能決策輸出的結果,控制車輛的駕駛行為,保障車輛安全到達預定目標點的過程。智能網(wǎng)聯(lián)公交車輛的控制執(zhí)行技術包括橫向控制與縱向控制兩類。橫向控制主要在保證安全與舒適的條件下控制車輛的轉向,縱向控制主要控制車輛的行駛速度,使車輛能夠按照預定時間安全到達目的地[4]。
(4)V2X通信技術
V2X通信技術主要是通過終端直連技術實現(xiàn)接近實體間端到端的信息傳送。V2X通信技術的發(fā)展包括三個階段。第一和第二階段分別專注于ITS遠程信息處理和高級輔助駕駛領域。隨著5G時代的到來,V2X通信技術正在發(fā)展到第三階段,可以支持自動駕駛,遠程和協(xié)作駕駛以及實時環(huán)境感知和控制。其快速精準的信息傳輸是保障智能網(wǎng)聯(lián)公交車運行效率和安全的支撐技術[5]。
(5)云平臺和大數(shù)據(jù)技術
云平臺技術是智能網(wǎng)聯(lián)汽車的基礎技術,包括云計算、大數(shù)據(jù)的關聯(lián)分析和深度挖掘、數(shù)據(jù)高效存儲和檢索、數(shù)據(jù)交換共享等。
(6)高精度地圖和高精度定位技術
高精地圖是為自動駕駛汽車規(guī)劃道路行徑的重要基礎,相比一般普通導航地圖的精度是以米為單位的級別,高精地圖可以做到厘米級別。能夠為自動駕駛車輛提供定位、決策、交通動態(tài)信息等依據(jù)。在自動駕駛汽車傳感器出現(xiàn)故障或者周圍環(huán)境較為惡劣時,高精地圖也能確保車輛的基本行駛安全。
1.2 智能網(wǎng)聯(lián)公交行業(yè)應用現(xiàn)狀
隨著自動駕駛技術的不斷發(fā)展,智能網(wǎng)聯(lián)車輛的運行示范正在從封閉測試道路逐步轉移至開放測試道路。智能網(wǎng)聯(lián)汽車行駛范圍也拓展至工業(yè)區(qū)、商業(yè)區(qū)、交通樞紐、住宅區(qū)等各種場景。
2017年12,國內(nèi)第一輛自動駕駛公交車“阿爾法巴(Alphabus)”在深圳福田保稅區(qū)上路,這是中國首次、全球首例在開放道路上試運行的無人駕駛公交。2018年12月,湖南湘江新區(qū)智能網(wǎng)聯(lián)公交示范線正式開通試運行,這是國內(nèi)首條在開放道路條件下運營的智能網(wǎng)聯(lián)公交線路。2019年1月,在上海國家會展中心舉辦的“新一代人工智能未來發(fā)展峰會”上,深蘭科技發(fā)布了一款世界首創(chuàng)的多功能“熊貓智能公交車”,該車配備了智能駕駛、生物識別、語音交互、精準廣告推送、車載監(jiān)察機器人、智能無人零售系統(tǒng)、異常行為監(jiān)控系統(tǒng)、智能逃生緊急處理等系統(tǒng)。2019年5月,河南省政府和宇通客車聯(lián)手打造的5G智能公交項目在鄭州龍子湖智慧島落地,4輛宇通L4級自動駕駛巴士開始在智慧島開放道路試運行,這也是全球首條在開放道路上試運行的5G無人駕駛公交。2020年5月,由海南聯(lián)通開發(fā)建設,運用了5G、邊緣計算、車路協(xié)同等前沿科學技術的海南首個“5G+無人駕駛車”體驗項目在海南正式投入運營,成為推動“5G+無人駕駛車”應用商業(yè)化的一次很有意義的嘗試。
但公共交通運行場景中更高的安全性要求、更精確的車輛控制要求、更智能化的車輛調度決策要求給以單車智能為主的智能網(wǎng)聯(lián)公交帶來的諸多技術難題和挑戰(zhàn),車路云一體化、智能網(wǎng)聯(lián)汽車、智慧道路是解決問題的關鍵。為此,本研究提出了“車路云一體”的智能網(wǎng)聯(lián)公交解決方案,推動智能網(wǎng)聯(lián)公交系統(tǒng)的技術轉化和產(chǎn)業(yè)升級。
2車路云一體智能網(wǎng)聯(lián)公交關鍵需求場景
分析智能網(wǎng)聯(lián)公交運營的全過程,將關鍵需求場景分為全過程的精準調度場景,全行程的優(yōu)先通行場景,全路程的安全保障場景,全旅程的優(yōu)質服務場景。
2.1 全過程的精準調度
智能網(wǎng)聯(lián)公交車輛運行過程中,調度員需要全程對運行車輛進行動態(tài)監(jiān)控,實時精準定位公交車輛的位置,速度,運行狀態(tài)等信息,通過遠程視頻監(jiān)控了解智能網(wǎng)聯(lián)公交車輛,站臺實時運營情況。調度人員需要通過多種通信手段與運行的網(wǎng)聯(lián)公交車保持實時通信,將語音通信數(shù)字化、視頻傳輸網(wǎng)絡化、調度管理信息化,發(fā)布調度指令,實現(xiàn)精準調度。
2.2 全行程的優(yōu)先通行
網(wǎng)聯(lián)公交車輛通過信號控制交叉口時,需要保證運行全程無紅燈,實現(xiàn)信號優(yōu)先功能,保證公交車輛運行效率。首先要獲取準確,可靠的信號配時信息,根據(jù)公交車輛運行的位置和速度,實施相應的信號優(yōu)先策略,通過紅燈早斷,綠燈延長,插入相位等策略保證公交優(yōu)先通過交叉口。
2.3 全路程的安全保障
車輛運行過程中,需要通過車載多源傳感器配置及融合,實現(xiàn)車輛360°無死角、冗余的避障保護,通過車路協(xié)同的全息感知,實現(xiàn)路口、遮擋等場景下的行人檢測、車輛沖突預警、前方道路施工預警、濕滑預警、急轉彎預警等功能,保障車輛運行過程中的絕對安全。
2.4 全旅程的優(yōu)質服務
基于高精度的車輛定位信息和道路實時信號信息,做到更為準確的車輛運行軌跡和到站時間的預測,通過站臺廣播系統(tǒng)發(fā)布精準的到站信息,通過手機端app推送車輛到站信息,提升乘客服務體驗。 此外,為更好地服務乘客,需要實時監(jiān)測與統(tǒng)計站點客流量信息,結合乘客預約信息,基于MASS理念定制出行條件下的需求響應方案。
3車路云一體智能網(wǎng)聯(lián)公交系統(tǒng)方案
根據(jù)關鍵需求場景,本文充分考慮車端、路端、云端的功能交互與協(xié)同,研究車路云一體智能網(wǎng)聯(lián)公交系統(tǒng),由智能網(wǎng)聯(lián)公交車輛子系統(tǒng),智能網(wǎng)聯(lián)公交路側子系統(tǒng),智能網(wǎng)聯(lián)公交云控平臺子系統(tǒng)三個子系統(tǒng)構成。其總體框架如圖1所示。
3.1 智能網(wǎng)聯(lián)公交車輛子系統(tǒng)方案
(1)環(huán)境感知子系統(tǒng)
對于單車環(huán)境感知,采用多源360°環(huán)境感知技術,基于激光雷達、毫米波雷達以及攝像頭實現(xiàn),通過對激光雷達與攝像頭融合,來為車輛提供更精確的可行駛范圍信息。除單車感知系統(tǒng)外,RSU路側單元會協(xié)助提供環(huán)境目標信息,與單車感知進行融合,構成車路協(xié)同超視距感知視野,尤其針對路口、遮擋等存在盲區(qū)的場景。
(2)高精度定位子系統(tǒng)
基于GPS數(shù)據(jù)協(xié)同路段傳感器進行組合定位,得出魯棒性強、準確性高的定位結果。另外在車輛停靠站場景下要將車輛自身定位結果與車站UWB定位信息進行融合,以實現(xiàn)車輛精準停靠的功能。
(3)智能決策系統(tǒng)
車路云協(xié)同智能決策策略系統(tǒng)主要根據(jù)周邊環(huán)境,定位信息,云端輸入等信息規(guī)劃車輛行駛路徑,實現(xiàn)環(huán)境和車輛的閉環(huán)控制。
(4)車輛運動控制系統(tǒng)
車輛運動控制主要分為縱向控制和橫向控制兩部分。縱向控制,使車輛的運動狀態(tài)與上層決策期望值一致,采用PID控制方法。橫向控制使車輛沿著上層決策規(guī)劃制定的路徑行駛,采用軌跡跟蹤算法。
3.2 智能網(wǎng)聯(lián)公交路側子系統(tǒng)方案
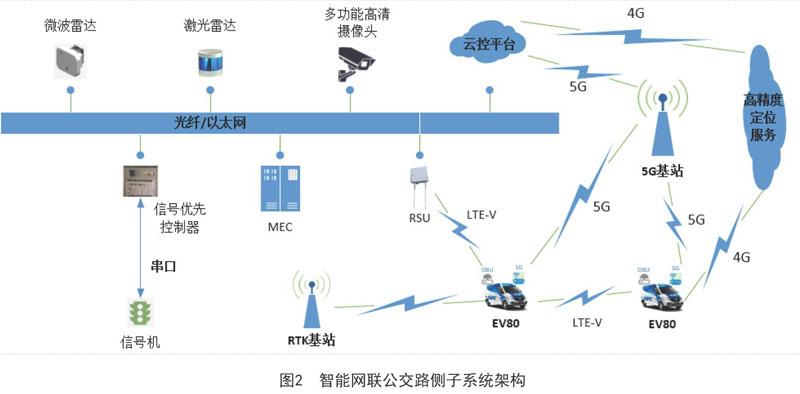
(1)系統(tǒng)架構
路側子系統(tǒng)主要由邊緣處理單元、感知和通信終端等部分組成。路側子系統(tǒng)總體系統(tǒng)架構如圖2。
(2)系統(tǒng)功能
1)全程道路信號與車輛運行協(xié)同決策
通過信號優(yōu)先控制器和邊緣計算設備結合先進的路側感知和網(wǎng)聯(lián)設備,建立車與路協(xié)同信號優(yōu)先決策交互機制,通過優(yōu)先控制手段,實現(xiàn)智能網(wǎng)聯(lián)公交車實現(xiàn)面向路口優(yōu)先場景的深度互聯(lián),保證智能網(wǎng)聯(lián)公交在交叉口的高效優(yōu)先通行。在多交叉口聯(lián)動場景或路側設備異常的情況下,云控平臺的信號優(yōu)先控制中心系統(tǒng)除了常規(guī)的監(jiān)控功能,還可取代信號優(yōu)先控制器采取中心協(xié)同干預的模式,直接參與信號優(yōu)先決策控制,形成車路云協(xié)同信號優(yōu)先。
2)精準進站
公交車輛進站位置的準確性會對公交運營的安全和效率產(chǎn)生影響,通過單車定位技術實現(xiàn)高精度定位不僅成本高,且在車站環(huán)境下定位精度可能會受影響。因此,本研究提出車路協(xié)同的精準進站功能,通過在車站布設UWB定位基站,與車輛自身的定位系統(tǒng)數(shù)據(jù)進行融合,實現(xiàn)車輛橫向、縱向位置以及車身姿態(tài)的精確定位。
3)超空間安全防護
專用道路保證了公交車輛基本通行權,但復雜多樣的道路交通環(huán)境造成的感知盲區(qū)依然給公交車輛運行的安全性帶來挑戰(zhàn)。在全路段和常規(guī)交叉口布置多功能高清攝像機,在關鍵路口布置激光雷達,通過RSU路側單元以LTE-V傳輸給智能網(wǎng)聯(lián)公交的OBU車載單元,輔助車輛感知與定位,進行超空間安全防護,提醒車輛和安全員采取措施以防止事故發(fā)生。
4)站臺客流感知
結合人工智能目標識別算法,實現(xiàn)站臺,車輛等場景下的客流需求感知。實時檢測車輛,站臺客流運行情況,實現(xiàn)大客流預警功能,為需求響應公交的規(guī)劃調度決策提供依據(jù)。
3.3 智能網(wǎng)聯(lián)公交云控平臺子系統(tǒng)方案
(1)系統(tǒng)架構
云控平臺由基礎平臺和業(yè)務功能組成。云控基礎平臺的架構包括基礎中臺和數(shù)據(jù)中臺兩個層次。基礎中臺建立信息化系統(tǒng)開發(fā)、測試和發(fā)布運維的統(tǒng)一標準,數(shù)據(jù)中臺解決數(shù)據(jù)采集、清洗、服務等問題。業(yè)務功能主要包括遠程監(jiān)控與干預,平行仿真,app三個子功能,如圖3。
(2)系統(tǒng)功能
1)云控調度
云控調度實現(xiàn)營運車輛的日常調度功能,具體包括行車計劃管理、智能調度管理、調度指令下發(fā)管理服務、營運分析報表、營運基礎數(shù)據(jù)管理等功能。
行車計劃管理:實現(xiàn)基于背景客流的基礎行車計劃三表管理(時刻表、接落班表、值勤表)、行車計劃參數(shù)管理、節(jié)假日規(guī)則管理以及基于預約請求的行車計劃動態(tài)更新響應服務。
智能調度管理:實現(xiàn)基于模擬圖或GIS地圖的實時調度監(jiān)管,對線路營運秩序、車輛營運狀態(tài)進行管理,并在必要時及時生成調度指令。
調度指令下發(fā):根據(jù)自動或手動創(chuàng)建的調度指令,向配套的車載移動終端或無人駕駛系統(tǒng)終端(通過無人駕駛云控協(xié)議)下發(fā)調度指令,如營運計劃調整、安全提示、緊急廣播等指令信息。
營運分析報表:實現(xiàn)從車輛、線路、人員、時間范圍等多個維度對營運績效的統(tǒng)計分析。
營運基礎數(shù)據(jù)管理:實現(xiàn)對線路、車輛、人員、營運調度參數(shù)等基本信息的維護管理。
2)智能公交遠程監(jiān)控與干預系統(tǒng)
遠程數(shù)據(jù)采集與管理:實現(xiàn)車輛實時信息、路側實時信息的采集與管理,包括車輛總線數(shù)據(jù)集、交通狀態(tài)數(shù)據(jù)集等。
系統(tǒng)運行狀態(tài)實時監(jiān)控與展示:基于遠程實時采集數(shù)據(jù),實現(xiàn)全方位監(jiān)管,對設備故障或系統(tǒng)運行異常及時發(fā)出告警信息,對車載視頻進行AI分析,并通過可視化場景疊加各類監(jiān)管數(shù)據(jù),直觀展示智能網(wǎng)聯(lián)車輛、V2X路側設施設備的運行狀態(tài)。
系統(tǒng)運行數(shù)據(jù)分析應用:系統(tǒng)運行數(shù)據(jù)分析應用通過對智能網(wǎng)聯(lián)數(shù)據(jù)的建模分析,實現(xiàn)對車路云智能公交的協(xié)同運行數(shù)據(jù)進行后評估與分析。
基于5G超寬帶的公交遠程干預控制:公交運行過程中會遇到車輛智駕系統(tǒng)失效等特殊情況,利用5G網(wǎng)絡低時延、超寬帶的特點,從云控中心遠程向車輛端發(fā)送車輛運動控制指令,與車輛控制系統(tǒng)連接,保證車輛恢復正常運行狀態(tài)。
3)平行仿真
仿真場景庫:通過數(shù)據(jù)搜集獲取現(xiàn)有可行的測試場景,利用元分析方法對效益較高的測試場景進行篩選,之后搭建以安全類,效率類及信息服務類三類場景為主的仿真場景庫,進一步對場景內(nèi)的靜態(tài)設施和動態(tài)單位進行參數(shù)化,從而實現(xiàn)現(xiàn)實場景到場景特征參數(shù)的轉化,為后續(xù)場景動態(tài)選取奠定基礎。
在線評價:搭建快速在線評價模塊,首先通過對數(shù)據(jù)庫中的有效數(shù)據(jù)精準提取從而降低計算負擔,在相關仿真范圍內(nèi)實現(xiàn)精準測評并提取相關影響特征,生成準確數(shù)值評價結果,用于后續(xù)場景序列的生成。
自適應仿真場景生成:在完成精準評價后,本部分在已有仿真場景庫的基礎上,對不同仿真場景的觸發(fā)條件進行參數(shù)化,標定參數(shù)可行域。依據(jù)在線更新的評價結果,從場景集中更新場景序列,場景序列觸發(fā)生成新的仿真評價結果,反饋更新仿真場景序列,不斷逼近仿真的真實結果,實現(xiàn)精準仿真。
仿真模型參數(shù)調優(yōu):通過仿真模型參數(shù)調優(yōu)有效提高仿真運行精度,從而提高仿真結果的可靠性。通過對比真實環(huán)境與仿真環(huán)境的同步運行情況修正仿真模型參數(shù),快速提升仿真模型參數(shù)精度。
4)智慧出行APP
滿足乘客查詢出行線路信息、規(guī)劃出行路線、查詢實時車輛到站情況等信息查詢需求,提供公交出行預約功能,接入需求響應式公交出行服務,提高公交信息服務的便利性。從運營的角度,智慧出行APP能夠用于采集乘客預約需求和出行行為數(shù)據(jù),實現(xiàn)線路和線網(wǎng)的優(yōu)化布局。
4結束語
人工智能,云計算及系統(tǒng)集成等技術的飛速發(fā)展,智能網(wǎng)聯(lián)公交系統(tǒng)為發(fā)展解決交通問題提供了一種新的思路和實施途徑,車路云一體化的發(fā)展路線將改善單車感知能力的局限[6]。本文在研究智能網(wǎng)聯(lián)公交關鍵技術和需求場景的基礎上,提出了車路云一體智能網(wǎng)聯(lián)公交系統(tǒng)解決方案。主要從車端,路端,云端三個方面入手,研究系統(tǒng)架構設計及功能詳細設計。
系統(tǒng)從道路系統(tǒng)全局出發(fā),實現(xiàn)全路全息和全維度的一體化感知,不僅能夠為出行者提供更安全更有效的自動駕駛出行服務,也能夠提高道路整體運行效率,在增加乘客吸引力的同時,為智能網(wǎng)聯(lián)技術的推廣應用創(chuàng)造條件,從而改善道路條件,推動智慧城市的可持續(xù)發(fā)展。
參考文錢
[1] 錢志鴻,田春生,郭銀景,等. 智能網(wǎng)聯(lián)交通系統(tǒng)的關鍵技術與發(fā)展[J]. 電子與信息學報,2020,42(1):2-19.
[2] Shangguan W,Du Y,GUO C,et al. Survey of connected automated vehicle perception mode:From autonomy to interaction[J]. IET Intelligent Transport Systems,2019,13(3):495–505.
[3] ADEN B,?P M,YONG S Z,et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles,2016,1(1):33–55.
[4] ZHANG H,WANG J. Vehicle lateral dynamics control through AFS/DYC and robust gain-scheduling approach[J]. IEEE Transactions on Vehicular Technology,2016,65(1):489–494.
[5] 田春生,錢志鴻,閻雙葉,等. D2D通信中聯(lián)合鏈路共享與功率分配算法研究[J]. 電子學報,2019(4): 769–774.
[6] 冉斌,譚華春,張健,等. 智能網(wǎng)聯(lián)交通技術發(fā)展現(xiàn)狀及趨勢[J]. 汽車安全與節(jié)能學報,2018,9(2):119-130.
作者簡介
沈峰(1979-),上海人;學歷:博士,職稱:高級工程師,研究方向:智能交通系統(tǒng)。
