基于RRT*算法的自主代客泊車路徑規(guī)劃仿真與分析
2020-09-06 14:09:41劉猛華蕾花逸峰謝軍
時(shí)代汽車 2020年14期
劉猛 華蕾 花逸峰 謝軍


摘 要:本文采用RRT*算法和三次樣條曲線規(guī)劃出一條從起始點(diǎn)到目標(biāo)車位的可行平滑路徑,然后基于Matlab對(duì)其進(jìn)行仿真與分析。仿真結(jié)果表明,該算法能夠有效地在停車場(chǎng)這類半結(jié)構(gòu)化環(huán)境中規(guī)劃出一條滿足車輛動(dòng)力學(xué)和運(yùn)動(dòng)學(xué)的可行路徑,同時(shí)使用三次樣條曲線進(jìn)行平滑擬合,使規(guī)劃出的軌跡更加平順光滑,以減少不必要的橫向擺動(dòng)。
關(guān)鍵詞:自主代客泊車 局部路徑規(guī)劃 RRT*算法 三次樣條曲線
1 引言
自主代客泊車路徑規(guī)劃是根據(jù)研究人員對(duì)其所設(shè)定的某種具有可選擇最優(yōu)路徑規(guī)劃法則,規(guī)劃出一條從落客點(diǎn)(起始點(diǎn))到目標(biāo)車位的最優(yōu)且安全無碰撞路徑[1-3]。國內(nèi)外學(xué)者對(duì)其已進(jìn)行了大量的研究并取得了一些成果。但同時(shí)也存在著一些問題,例如在面對(duì)復(fù)雜環(huán)境時(shí)算法的概率完備性不佳、搜索時(shí)間長、適用范圍小等,以及方案所使用的平滑曲線效果不佳。為了解決上述問題,本文針對(duì)自主代客泊車場(chǎng)景下智能車輛的局部路徑規(guī)劃問題,采用RRT*算法和三次樣條曲線的方式進(jìn)行車輛入庫局部路徑規(guī)劃,并在Matlab平臺(tái)上進(jìn)行仿真實(shí)驗(yàn)與分析。
2 基于RRT*算法的自主代客泊車路徑規(guī)劃仿真與分析
2.1 仿真場(chǎng)景搭建
本文所使用的停車場(chǎng)環(huán)境地圖由三個(gè)柵格圖層構(gòu)成:1)固定障礙物圖層,該層包含固定障礙物,例如墻壁和停車場(chǎng)邊界等;2)道路標(biāo)圖層,該層包含與道路標(biāo)記有關(guān)的占用信息,包括車位的道路標(biāo)記等;3)停放汽車圖層,這一層包含有關(guān)已經(jīng)占用了的停車位的信息,本文額外在停車場(chǎng)道路上加入了暫停車輛信息。每個(gè)圖層都包含不同種類的障礙物,深色部分代表障礙物,而淺色部分代表可自由行駛區(qū)域,通過這種結(jié)構(gòu)可以獨(dú)立地處理、更新和維護(hù)每一層。將三個(gè)圖層合并后生成停車場(chǎng)成本圖如圖1所示,停車場(chǎng)空間尺寸為7550。
停車場(chǎng)成本圖將停車場(chǎng)環(huán)境表示為2D占用網(wǎng)格,單元中的每個(gè)網(wǎng)格的值都在0到1之間,表示在單元中行駛的成本,障礙物的成本較高,而自由空間的成本較低。
2.2 仿真結(jié)果與分析
首先給定全局路線使車輛行駛至泊車準(zhǔn)備位置,因此設(shè)置了如圖2所示的4個(gè)中間位置,使車輛依次通過這些位置到達(dá)泊車準(zhǔn)備位置Goal 4,其坐標(biāo)為(53,38)。
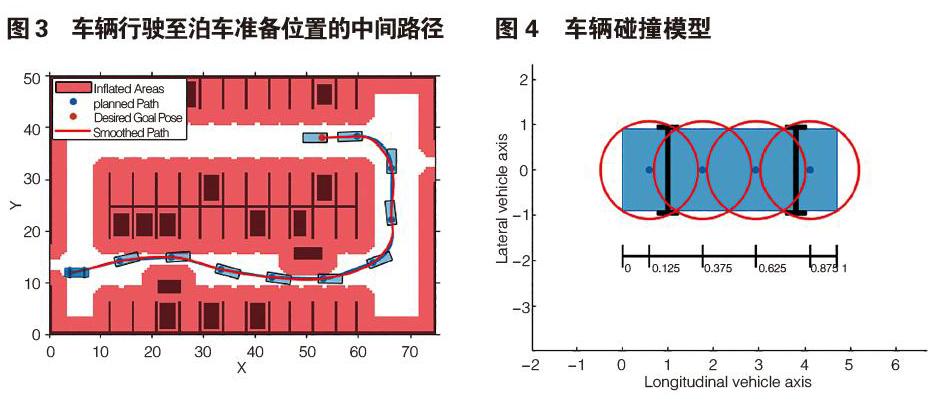
本文將車輛模型簡化為長4.8寬2的藍(lán)色矩形塊,車輛的最大轉(zhuǎn)向角設(shè)置為35°。由于從停車場(chǎng)入口位置Goal 1到泊車準(zhǔn)備位置Goal 4這一段路徑中并不需要較大幅度地調(diào)整位置,故最小轉(zhuǎn)向半徑設(shè)置為20,RRT*算法的最小迭代次數(shù)設(shè)為1000,采樣點(diǎn)之間的擬合方式選擇Dubins曲線。執(zhí)行路徑搜索與路徑平滑循環(huán)得出搜索路徑與平滑路徑對(duì)比圖如圖3所示,圖3中藍(lán)色路徑為搜索路徑,紅色路徑為平滑處理后的路徑。
在到達(dá)泊車準(zhǔn)備位置后為了適應(yīng)泊車所需條件,本文對(duì)一些參數(shù)進(jìn)行了修改,包括將最小轉(zhuǎn)彎半徑設(shè)為12以方便進(jìn)行微小調(diào)整,同時(shí)將采樣點(diǎn)之間的擬合方式換成Reeds-shepp曲線以完成倒車入庫操作。車輛在泊車過程中的碰撞檢查是通過將成本圖中的障礙物膨脹充氣后檢查車輛碰撞模型的圓心是否位于膨脹的網(wǎng)格單元上來實(shí)現(xiàn)的,車輛的碰撞模型由四個(gè)圓圈組成,使其更加容易地通過狹小區(qū)域,車輛的碰撞圖形如圖4所示。
碰撞檢測(cè)完成之后車輛進(jìn)行泊車入庫操作,泊車目標(biāo)位置坐標(biāo)為(49,47)。本文將pathPlanner RRT函數(shù)的連接距離參數(shù)修改為1,這樣可以使車輛模型的顯示更加緊湊從而更直觀的表示車輛行駛軌跡。車輛首先從泊車準(zhǔn)備位置斜向前方行駛一段距離后進(jìn)行倒車入庫操作,具體路徑如圖5所示,其中(a)為搜索路徑,(b)為平滑后的路徑。兩者進(jìn)行比較可發(fā)現(xiàn)平滑后的路徑車輛擺動(dòng)幅度較小更加平順光滑。
3 總結(jié)
本文通過基于RRT*算法的PathPlanner
RRT函數(shù)在Matlab平臺(tái)上實(shí)現(xiàn)了自主代客泊車路徑規(guī)劃。在環(huán)境建模時(shí),本文在道路上加入了暫停車輛從而模擬了車輛的直行避障場(chǎng)景;在得出搜索路徑后使用三次樣條曲線進(jìn)行路徑平滑,提高了路徑的平順性;在進(jìn)行泊車入庫操作時(shí),本文將車輛模型的連接距離調(diào)整為1,使得車輛模型的顯示更加緊湊,并將最小轉(zhuǎn)彎半徑調(diào)整為12,以便車輛在小范圍內(nèi)調(diào)整姿態(tài),最后生成搜索路徑與平滑路徑。
參考文獻(xiàn):
[1]錢燮暉,何秀鳳,郭俊文,等.基于二次A算法的復(fù)雜環(huán)境下車輛導(dǎo)航路徑規(guī)劃方法[J].甘肅科學(xué)學(xué)報(bào),2020,32(2),7-15.
[2]高奇. 無人駕駛自主代客泊車路徑規(guī)劃與跟蹤控制策略研究[D]. 西安:長安大學(xué),2019.
[3]KLAUDT S,ZLOCKI A, ECKSTEIN L. A-priori map information and path planning for automated valet-parking[C].IEEE Intelligent Vehicles Symposium,2017:1770-1775.