基于SVR的船舶航行安全評估模型
2020-09-01 03:14:24常婧柳曉鳴李夢蕊
上海海事大學學報 2020年2期
常婧 柳曉鳴 李夢蕊

摘要:為對船舶航行安全狀況進行有效預測,利用支持向量回歸(support vector regression, SVR)算法構建船舶航行安全評估模型。在分析影響船舶航行安全的因素的基礎上,對船舶歷史數據進行預處理后將其作為模型訓練和測試的樣本數據。實驗結果表明:該模型評估準確度可達99.6%以上;在同一樣本數據條件下,模型的評估準確度和穩定性均優于基于極限學習機(extreme learning machine,ELM)構建的模型。模型的評估結果為水上交通管理部門的監管提供參考。
關鍵詞: 航行安全; 安全評估; 支持向量回歸(SVR); 極限學習機(ELM)
中圖分類號: U676.1 ? ?文獻標志碼: A
Ship navigation safety assessment model based on SVR
CHANG Jing, LIU Xiaoming, LI Mengrui
(Information Science and Technology College, Dalian Maritime University, Dalian 116026, Liaoning, China)
Abstract: In order to effectively predict the ship navigation safety status, the ship navigation safety assessment model is constructed by the support vector regression (SVR) algorithm. Based on the analysis of the factors affecting ship navigation safety, the ship historical data are preprocessed and used as sample data for model training and testing. The experimental results show that: the accuracy of the model evaluation can reach more than 99.6%; under the same sample data conditions, the accuracy and stability of the model are better than those constructed based on the extreme learning machine (ELM). The assessment results of the model provide reference for the supervision of the water traffic management department.
Key words: navigation safety; safety assessment; support vector regression (SVR); extreme learning machine (ELM)
0 引 言
水上交通運輸安全已成為制約我國航運業快速發展的重要因素。船舶在航行過程中受到人員、環境、船舶以及管理等多方面因素的影響,對船舶的航行安全狀況進行評估需要全面考慮這些因素。結合與這些因素相關聯的歷史事故數據,構建一個航行安全評估模型,實現對航行安全狀況的有效評估是當前急需解決的問題。
目前,評估船舶航行安全的方法主要有層次分析法(analytic hierarchy process,AHP)、主成分分析(principal component analysis,PCA)法、灰色理論、綜合安全評估(formal safety assessment,FSA)、模糊綜合評價(fuzzy comprehensive evaluation,FCE)以及人工神經網絡(artificial neural network,ANN)等方法。張笛等[1]從靜態信息、動態信息、通航環境和自然環境等方面對船舶數據信息進行了分析,利用AHP對內河船舶航行安全狀態進行了評價。李款等[2]基于橫傾角、舵角、艇速3個指標數據信息,分別利用PCA和BP神經網絡方法對水面艇的航行狀態進行評估。賈明明等[3]基于自然環境、航道環境和交通環境3類指標及其權重,利用灰色模糊綜合評價方法量化評估通航安全等級。這些方法評價結果具有一定的參考價值,但在實際應用中存在前期準備過程較為復雜的缺陷。
支持向量回歸(support vector regression,SVR)以統計學理論為基礎,依照有限樣本信息,在確保學習和泛化能力良好的條件下,將輸入信息非線性轉換到高維空間的決策函數實現線性回歸,以達到最理想的學習效果。[4]SVR具有收斂速度快的優點,已被應用于市場需求預測、電力負荷預測、交通流預測等方面,但還未應用于航行安全狀況預測。本文提出將SVR應用于船舶航行安全評估中,以期達到更好的效果。
本文基于SVR構建船舶航行安全評估模型,對船舶的航行安全狀況進行量化評估。在利用船舶歷史數據進行訓練建模之前,對樣本數據進行預處理。首先分析數據信息類型和數據來源,然后按照關聯的影響指標對數據進行采集存儲,再對存儲的數據按照量化賦值原則進行量化賦值。隨后,利用粒子群優化(particle swarm optimization,PSO)算法[5]進行SVR模型參數尋優,將優化后的參數值輸入模型,并用歷史數據進行仿真訓練得出安全預測值。比較預測值與實際安全值,得到模型預測準確度達到99.6%以上。為驗證模型的優越性,在相同樣本數據條件下用神經網絡算法中應用較多的極限學習機(extreme learning machine,ELM)[6]進行仿真訓練,結果顯示SVR模型的預測精確度和魯棒性明顯優于基于ELM理論構建的模型。該模型不僅能提升數據信息利用率,而且能使最終的預測結果具有較高的準確度和穩定性,實現對航行安全狀況的有效預測,提高船舶交通服務系統(vessel traffic services, VTS)安全監管功能的可靠性。
1 船舶航行安全評估模型
首先構建較為全面的影響船舶航行安全的指標體系,在此基礎上利用SVR同時結合船舶歷史數據構建船舶航行安全評估模型。在利用船舶歷史數據進行訓練學習和測試之前,需要利用大數據處理技術對數據進行處理。先根據上述指標體系對船舶歷史數據中的相關信息進行提取,然后對應船名存儲與各指標相關的數據信息,最終按照一定的賦值量化規則對數據信息進行預處理。將預處理后的數據作為樣本輸入數據,樣本輸入數據對應的實際安全值作為樣本輸出數據。模型通過對樣本數據的訓練學習得到各指標與船舶航行安全值之間的關系后,輸入與各指標關聯的船舶數據就能得到對應的安全評估值和評估精度。
1.1 影響船舶航行安全的指標體系
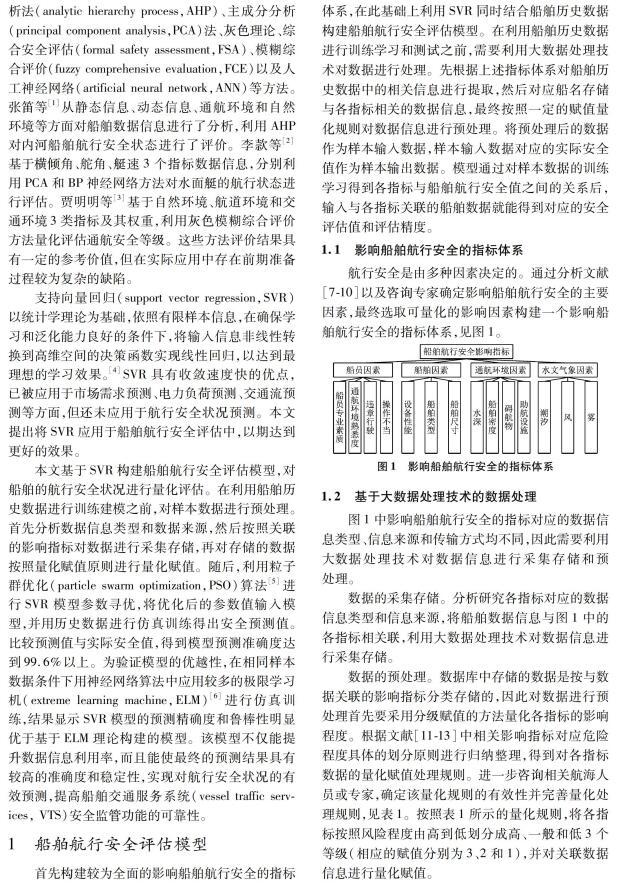
航行安全是由多種因素決定的。通過分析文獻[7-10]以及咨詢專家確定影響船舶航行安全的主要因素,最終選取可量化的影響因素構建一個影響船舶航行安全的指標體系,見圖1。
1.2 基于大數據處理技術的數據處理
圖1中影響船舶航行安全的指標對應的數據信息類型、信息來源和傳輸方式均不同,因此需要利用大數據處理技術對數據信息進行采集存儲和預處理。
數據的采集存儲。分析研究各指標對應的數據信息類型和信息來源,將船舶數據信息與圖1中的各指標相關聯,利用大數據處理技術對數據信息進行采集存儲。
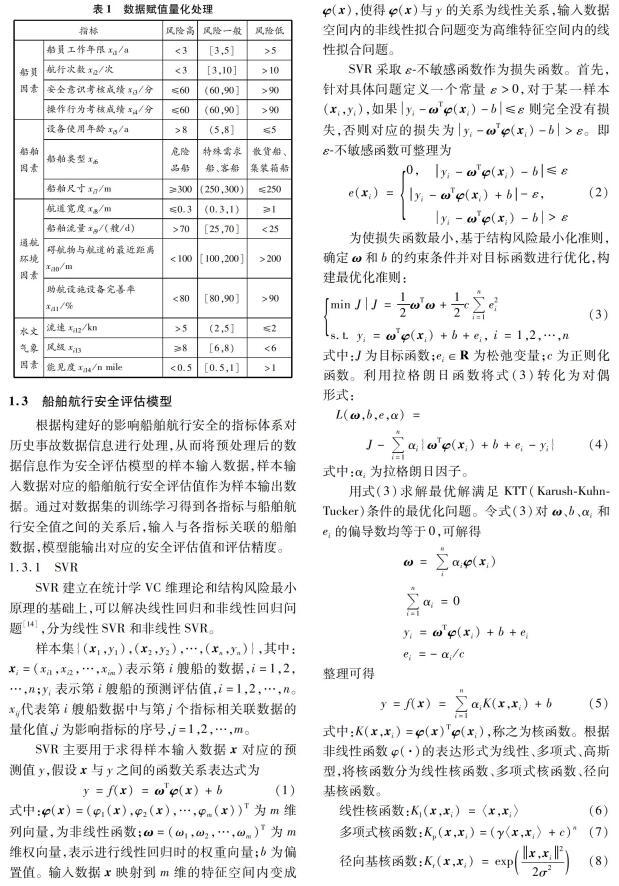
數據的預處理。數據庫中存儲的數據是按與數據關聯的影響指標分類存儲的,因此對數據進行預處理首先要采用分級賦值的方法量化各指標的影響程度。根據文獻[11-13]中相關影響指標對應危險程度具體的劃分原則進行歸納整理,得到對各指標數據的量化賦值處理規則。進一步咨詢相關航海人員或專家,確定該量化規則的有效性并完善量化處理規則,見表1。按照表1所示的量化規則,將各指標按照風險程度由高到低劃分成高、一般和低3個等級(相應的賦值分別為3、2和1),并對關聯數據信息進行量化賦值。
1.3 船舶航行安全評估模型
根據構建好的影響船舶航行安全的指標體系對歷史事故數據信息進行處理,從而將預處理后的數據信息作為安全評估模型的樣本輸入數據,樣本輸入數據對應的船舶航行安全評估值作為樣本輸出數據。通過對數據集的訓練學習得到各指標與船舶航行安全值之間的關系后,輸入與各指標關聯的船舶數據,模型能輸出對應的安全評估值和評估精度。
1.3.1 SVR
SVR建立在統計學VC維理論和結構風險最小原理的基礎上,可以解決線性回歸和非線性回歸問題[14],分為線性SVR和非線性SVR。
樣本集{(x1,y1),(x2,y2),…,(xn,yn)},其中:xi=(xi1,xi2,…,xim)表示第i艘船的數據,i=1,2,…,n;yi表示第i艘船的預測評估值,i=1,2,…,n。xij代表第i艘船數據中與第j個指標相關聯數據的量化值,j為影響指標的序號,j=1,2,…,m。
SVR主要用于求得樣本輸入數據x對應的預測值y,假設x與y之間的函數關系表達式為y=f(x)=ωTφ(x)+b
(1)式中:φ(x)=(φ1(x),φ2(x),…,φm(x))T為m維列向量,為非線性函數;ω=(ω1,ω2,…,ωm)T為m維權向量,表示進行線性回歸時的權重向量;b為偏置值。輸入數據x映射到m維的特征空間內變成φ(x),使得φ(x)與y的關系為線性關系,輸入數據空間內的非線性擬合問題變為高維特征空間內的線性擬合問題。
SVR采取ε-不敏感函數作為損失函數。首先,針對具體問題定義一個常量ε>0,對于某一樣本(xi,yi),如果yi-ωTφ(xi)-b≤ε則完全沒有損失,否則對應的損失為yi-ωTφ(xi)-b>ε。即ε-不敏感函數可整理為
e(xi)=0, yi-ωTφ(xi)-b≤ε
yi-ωTφ(xi)+b-ε,
yi-ωTφ(xi)-b>ε
(2)
為使損失函數最小,基于結構風險最小化準則,確定ω和b的約束條件并對目標函數進行優化,構建最優化準則:
min JJ=12ωTω+12cni=1e2i
s.t. yi=ωTφ(xi)+b+ei, i=1,2,…,n
(3)
式中:J為目標函數;ei∈R為松弛變量;c為正則化函數。利用拉格朗日函數將式(3)轉化為對偶形式:
L(ω,b,e,α)=
J-ni=1αi{ωTφ(xi)+b+ei-yi}
(4)
式中:αi為拉格朗日因子。
用式(3)求解最優解滿足KTT(Karush-Kuhn-Tucker)條件的最優化問題。令式(3)對ω、b、αi和ei的偏導數均等于0,可解得ω=niαiφ(xi)
ni=1αi=0
yi=ωTφ(xi)+b+ei
ei=-αi/c整理可得y=f(x)=ni=1αiK(x,xi)+b
(5)式中:K(x,xi)=φ(x)Tφ(xi),稱之為核函數。根據非線性函數φ(·)的表達形式為線性、多項式、高斯型,將核函數分為線性核函數、多項式核函數、徑向基核函數。
線性核函數:Kl(x,xi)=〈x,xi〉
(6)
多項式核函數:Kp(x,xi) = (γ〈x,xi〉+c)n
(7)
徑向基核函數:Kr(x,xi)=expx,xi22σ2
(8)
1.3.2 基于SVR的安全評估模型
基于SVR構建船舶航行安全評估模型,見圖2。結合船舶歷史數據可實現對船舶航行安全的評估。船舶歷史數據需要利用大數據處理技術進行預處理。首先根據影響船舶航行安全的指標體系確定數據中的有效信息,然后對數據進行采集存儲。將第i艘船的歷史數據中與第j個指標關聯數據的量化值xij(i=1,2,…,n;j=1,2,…,m)作為模型的輸入數據,每艘船的數據對應的船舶實際航行安全值Yi(i=1,2,…,n)作為模型的輸出數據。把處理后的船舶歷史數據集劃分為訓練數據集和測試數據集,通過對訓練數據集的訓練學習得到各指標與船舶航行安全值之間的關系。輸入與各指標關聯的船舶數據,模型能輸出對應的安全評估值。通過比較模型的輸出數據和測試數據對應的安全評估值,得到模型的評估精度從而確定模型的有效性。
2 仿真實驗分析
2.1 模型的有效性驗證
對近十年大連港水域的船舶數據進行清洗,得到3 083條參數特征明顯的船舶數據。將其作為進行仿真的樣本數據集,樣本數據結構見表2。將該數據集按照表1所示的量化規則進行預處理后,選取該數據集80%的船舶數據作為訓練數據集,其余20%的船舶數據作為測試數據集。首先將訓練數據集中與各指標相關聯的船舶數據作為輸入數據,對應的船舶航行安全值作為輸出數據,通過訓練學習得到船舶航行安全評估值與影響指標的函數關系。然后輸入測試數據集中與各指標關聯的船舶數據,模型就會輸出對應船舶的安全評估值。最終將模型輸出的安全評估值與實際評估值進行比較,得到預測誤差和模型的評估精度,從而驗證模型的有效性和準確性。
首先利用PSO算法對SVR模型進行參數優化[15],通過對訓練數據集的學習得到最優參數值:g=0.1,w=0.05。然后根據式(5)~(8)得出安全評估模型在不同核函數條件下的評估值與實際安全值的誤差大小,結果見圖3。
a)基于線性核函數的誤差值 b)基于多項式核函數的誤差值 c)基于徑向基核函數的誤差值
由圖3可知,評估模型的預測誤差取值普遍在0.004~0.016范圍內,其中基于徑向基核函數的SVR構建的評估模型的評估誤差值較小且分布相對集中。總體來說,模型的預測結果準確度較高,具有較強的穩定性。
平均絕對誤差(mean absolute error,MAE)是所有單個觀測值與算術平均值之差的絕對值的平均值。平均絕對誤差可以避免誤差相互抵消的問題,因而可以準確反映實際評估誤差的大小。均方誤差(mean square error, MSE)是反映估計量與被估計量之間差異程度的一種度量,可以用于表示評估安全值與實際安全值之間的差異程度。擬合優度(goodness of fit)是回歸直線對觀測值的擬合程度。度量擬合優度的統計量是可決系數(亦稱確定系數)R2,其最大值為1。R2的值越接近1,說明回歸直線對觀測值的擬合程度越好。因此利用MAE、MSE和R2作為評估指標來度量模型的誤差精度。各評估指標具體含義如下:
MAE是將每艘船的數據輸入模型后得到的預測值與實際值的相差程度,公式如下:EMA=1nni=1yi-Yi
(9)式中:yi(i=1,2,…,n)表示由第i艘船的數據得到的預測安全值;Yi(i=1,2,…,n)表示第i艘船的數據的實際安全值。
MSE是將每艘船的數據輸入模型后得到的風險預測值與實際值差的平方的期望值,公式如下:EMS=1nni=1(yi-Yi)2
(10)EMS的值越小,說明安全評估模型的預測精度越高。
R2表示模型對于實際值的擬合程度,公式如下:R2=1-ni=1(yi-Yi)2ni=1(yi-y -)2
(11)式中:y -=1nni=1yi表示對n艘船進行預測得到的預測值yi的平均值。
由式(9)~(11)得到的誤差值見表3。由表3可知,該模型的誤差精度達到0.001,并且模型的預測值與實際值的擬合程度達到99.6%以上。結合前面的實驗結果可知,基于徑向基核函數的模型不僅評估誤差較小、分布相對集中,而且穩定性更好、均方誤差較小。因此最終選取基于徑向基核函數的SVR構建航行安全評估模型。
2.2 模型的優越性驗證
基于模型的有效性驗證所使用的3 083條樣本數據,利用基于ELM理論[16]構建的評估模型對樣本數據中的測試數據集進行船舶航行安全狀況的預測。進一步與基于SVR的船舶航行安全評估模型從預測誤差和精確度方面進行比較,從而驗證模型的優越性。
ELM是一種改進后的單隱層前饋神經網絡,由輸入層、一層隱含層和輸出層組成。樣本數據集具體表達形式為{(xi,yi),i=1,2,…,n}
(12)式中:xi=(xi1,xi2,…,xim)為輸入數據,i=1,2,…,n;yi為期望輸出值,i=1,2,…,n。隱含層輸出為
hj(xi)=mj=1g(wj·xi+bj), i=1,2,…,n
(13)
式中:wj=(w1j,w2j,…,wmj)T表示第j個隱含層節點的輸入權值;bj表示第j個隱含層節點的偏置值;gj(wj·xi+bj)表示樣本xi的第j個隱含層節點的輸出值,其中gj(·)為激活函數,此處選取S型激活函數。則模型的輸出結果為fj(xi)=mj=1βjhj(xi), i=1,2,…,n
(14)式中:βj=(βj1,βj2,…,βjn)表示第j個隱含層節點的輸出權值。
由式(13)和(14)可得出基于ELM理論的評估模型對船舶航行安全狀況進行預測的誤差值,見圖4。
由圖4可知,基于ELM理論的船舶航行安全評估模型的評估誤差取值范圍相對集中在0.04以下。結合圖3可知,基于SVR的船舶航行安全評估模型預測誤差值相對較小。
式(9)從數值方面表明了模型的預測精度,因此用EMA來比較基于兩種方法構建的模型的誤差精度,具體見表4。基于SVR的模型評估精度為0.001,而基于ELM構建的模型評估精度為 0.01,顯然基于SVR的模型的預測效果更優。
3 結束語
為對航行船舶的安全狀況進行評估,構建一個航行安全評估模型。首先建立完善的評估指標體系,在此基礎上利用大數據技術對數據進行預處理,將處理后的數據作為基于支持向量回歸(SVR)的船舶安全評估模型的輸入數據,得到船舶的安全評估值,然后與實際安全值進行比較。通過實驗驗證可知,模型的擬合程度達到99.6%以上,驗證了該模型的穩定性以及擬合度。進一步實驗驗證表明,基于SVR的模型預測精確度、魯棒性均高于基于極限學習機(ELM)的預測模型,說明該模型的優越性。該評估模型解決了當前評估指標單一、評估結果可靠性低的問題,有廣泛的應用前景。
參考文獻:
[1] 張笛, 姚厚杰, 萬程鵬, 等. 基于模糊證據推理的內河船舶航行安全狀態評價[J]. 安全與環境學報, 2018, 18(4): 1272-1277. DOI: 10.13637/j.issn.1009-6094.2018.04.006.
[2] 李款, 于寒. 基于數據驅動的水面艇航行狀態檢測與診斷[J]. 指揮與控制學報, 2016, 2(3): 188-193. DOI: 10.3969/j.issn.2096-0204.2016.03.0188.
[3] 賈明明, 熊錫龍, 黃立文, 等. 基于集值統計-灰色模糊的航道通航環境安全評價[J]. 安全與環境學報, 2017, 17(1): 41-45.
[4] 林毅. 一種基于SVR回歸的機場航跡預測方法[J]. 信息通信, 2019(7): 58-59.
[5] LIANG Haibo, ZOU Jialing, LI Zhiling, et al. Dynamic evaluation of drilling leakage risk based on fuzzy theory and PSO-SVR algorithm[J]. Future Generation Computer Systems, 2019, 95: 454-466. DOI: 10.1016/j.future.2018.12.068.
[6] 謝新連, 陳紫薇, 魏照坤, 等. 基于極限學習機的船舶航行行為預測[J]. 重慶交通大學學報(自然科學版), 2019, 38(8): 7-12, 123. DOI: 10.3969/j.issn.1674-0696.2019.08.02.
[7] 趙洪帝, 劉敬賢, 劉奕, 等. 基于改進未確知測度模型的內河客船夜航風險評價[J]. 交通信息與安全, 2018, 36(1): 28-34. DOI: 10.3963/j.issn.1674-4864.2018.01.004.
[8] WANG Lei, LIU Qing, DONG Shiyu, et al. Effectiveness assessment of ship navigation safety countermeasures using fuzzy cognitive maps[J]. Safety Science, 2019, 117: 352-364. DOI: 10.1016/j.ssci. 2019.04.027.
[9] BANDA O A V, GOERLANDT F, MONTEWKA J, et al. A risk analysis of winter navigation in Finnish sea areas[J]. Accident Analysis and Prevention, 2015, 79: 100-116. DOI: 10.1016/ j.aap.2015.03.024.
[10] ELIOPOULOU E, PAPANIKOLAOU A, VOULGARELLIS M. Statistical analysis of ship accidents and review of safety level[J]. Safety Science, 2016, 85: 282-292. DOI: 10.1016/ j.ssci. 2016.02.001.
[11] EVEGREN F. Fire risk assessment of alternative ship design[J]. Ships and Offshore Structures, 2017, 12(6): 837-842. DOI: 10.1080/17445302.2016.1275474.
[12] VIDMAR P, PERKOVI C M. Methodological approach for safety assessment of cruise ship in port[J]. Safety Science, 2015, 80: 189-200. DOI: 10.1016/j.ssci.2015.07.013.
[13] 聶細亮, 劉強, 李國帥, 等. LNG船舶海上運輸安全研究現狀及進展[J]. 中國安全科學學報, 2017, 27(5): 87-92.
[14] LIU Jiao, SHI Guoyou, ZHU Kaige. Vessel trajectory prediction model based on AIS sensor data and adaptive chaos differential evolution support vector regression (ACDE-SVR)[J]. Applied Sciences, 2019, 9(15): 2983. DOI: 10.3390/app9152983.
[15] 孫文兵, 彭躍輝. 基于PSO-SVR動態模型的車輛排隊長度預測[J]. 計算機工程與應用, 2016, 52(2): 239-243.
[16] 周馨, 王國胤, 于洪. 基于改進極限學習機的軟測量建模[J]. 計算機應用, 2017, 37(3): 668-672. DOI: 10.11772/j.issn.1001-9081.2017.03.668.
(編輯 賈裙平)
收稿日期: 2019- 05- 23 修回日期: 2019- 11- 01
作者簡介: 常婧(1995—),女,山西武鄉人,碩士研究生,研究方向為水上交通,(E-mail)1500521143@qq.com;
柳曉鳴(1959—),男,山東棲霞人,教授,博導,博士,研究方向為交通電子信息系統理論與技術,(E-mail)lxmdmu@dlmu.edu.cn