港口集裝箱起重機模擬訓練系統(tǒng)設(shè)計
2020-08-31 05:41:24戴孟業(yè)郭小強黃大志
機電信息 2020年17期
關(guān)鍵詞:電氣控制
戴孟業(yè) 郭小強 黃大志


摘要:港口集裝箱起重機模擬訓練系統(tǒng)是一款適用于訓練港口岸橋起重機操作和維護的實驗設(shè)備,由電氣控制系統(tǒng)、PLC控制系統(tǒng)、鋼絲繩系統(tǒng)、視頻定位系統(tǒng)及無線電磁鐵系統(tǒng)等組成,主要以模擬重點作業(yè)設(shè)備(場橋、岸橋)的運行工況為基礎(chǔ),人為干預為外部條件,干預結(jié)果為研究對象,開展針對性設(shè)備工況及故障研究。各部位可人為制造故障,以培訓、考核技術(shù)人員的操作技能,提高其實際維修保養(yǎng)設(shè)備的能力。
關(guān)鍵詞:集裝箱起重機;PLC控制;電氣控制;模擬仿真
0 引言
經(jīng)濟全球化趨勢下,國際貿(mào)易愈加頻繁,港口起重機大型化發(fā)展速度越來越快。集裝箱起重機(Container Crane)作為港口裝卸貨物的主要工具,主要由全數(shù)字化控制驅(qū)動裝置、可編程序控制器、故障診斷及數(shù)據(jù)管理系統(tǒng)、數(shù)字化操縱給定檢測等設(shè)備組成[1],其對港口的快速發(fā)展及裝卸效率的提升起著重要作用。
港口大型起重機規(guī)格龐大,故障維修難度大、風險高、成本高,為了解決技術(shù)人員培訓以及故障維修方面的難題,本文設(shè)計了一套港口集裝箱起重機縮小比例(1:66)模擬訓練系統(tǒng),使技術(shù)人員能夠熟悉起重機結(jié)構(gòu)和工作原理,掌握集裝箱起重機的實際操作方法,從而便于室內(nèi)技術(shù)人員培訓、故障排除等。
該設(shè)計集合了電氣控制技術(shù)、PLC控制技術(shù)、計算機技術(shù)、起重機運動學與動力學等眾多學科知識,基于電氣控制系統(tǒng)、PLC控制系統(tǒng)、鋼絲繩系統(tǒng)、視頻定位系統(tǒng)及無線電磁鐵系統(tǒng),對核心控制系統(tǒng)與原系統(tǒng)相同的模擬訓練控制系統(tǒng)進行設(shè)計與構(gòu)建,同時運用SolidWorks軟件對訓練系統(tǒng)模型進行三維設(shè)計與搭建,并進行仿真模擬及可行性分析。最后在此基礎(chǔ)上制作港口集裝箱起重機模擬訓練系統(tǒng)樣機,并對其性能進行分析。
1 方案設(shè)計
該設(shè)計主要是在全面了解港口起重機的結(jié)構(gòu)、運行原理和現(xiàn)場需求后,為了解決操作人員室內(nèi)培訓問題,進行的模擬訓練系統(tǒng)的研究。港口起重機主要分為集裝箱起重機、港口門座起重機、臺架式起重機、固定式起重機等,本課題考察的是連云港40 t集裝箱起重機。
集裝箱起重機模擬訓練系統(tǒng)構(gòu)造包括動力移動系統(tǒng)、傳動系統(tǒng)和全景視頻定位輔助系統(tǒng)。動力移動系統(tǒng)由小車、大車、大臂、吊具等構(gòu)成,系統(tǒng)的主要運動包括大小車的移動、吊具的升降和大臂的抬起、放下動作;小車移動距離為1 360 mm;大車在既定路徑下,電機與減速機配合讓大車保持穩(wěn)定工作;大臂抬起角度為0°~85°;吊具可自由升降,跟隨小車水平移動至既定位置。傳動系統(tǒng)主要由齒輪、齒條、滑輪、鋼絲繩組成。全景視頻定位輔助系統(tǒng)包括4個攝像頭,每個攝像頭捕捉到的畫面通過軟件合成一個全景視圖且無變形,最后呈現(xiàn)在工作臺屏幕上,便于工人實時觀察吊具的位置以及周圍環(huán)境的變化,改善司機操作條件,保證作業(yè)安全,提高自動化控制程度和擴大遠距離控制系統(tǒng)的使用范圍[2]。
2 機械系統(tǒng)與模型設(shè)計分析
2.1? ? 起重機模型結(jié)構(gòu)初步設(shè)計
模型制作包括形體設(shè)計、比例設(shè)計、材料選購和表面處理等。起重機模型設(shè)計的主要參數(shù):起重量61 kg,跨度0.45 m,起升高度1 m,起升速度1.2 m/min,小車運行速度v=1.2 m/min,大車運行速度Vdc=0.6 m/min,小車重量約0.65 kg,起重機模型質(zhì)量約100 kg,模型總體外觀尺寸為1 690 mm×460 mm×1 006 mm(長×寬×高),起重機基本結(jié)構(gòu)如圖1所示。
2.2? ? 大車運行機構(gòu)計算
已知起重機的起重量M=61 kg,橋架跨度L=0.45 m,大車運行速度Vdc=0.6 m/min,機構(gòu)運行持續(xù)率為JC=25%,起重機的估計重量G=100 kg,小車的重量為Gxc=0.65 kg。
大車傳動機構(gòu)如圖2所示。
通過選擇軸承,分別計算空載和滿載時的運行阻力矩,然后計算電動機的功率,根據(jù)功率進行選型,最后驗算電動機的發(fā)熱功率條件,確定電動機型號為2IK6GN-U。
3 電控及監(jiān)控系統(tǒng)設(shè)計
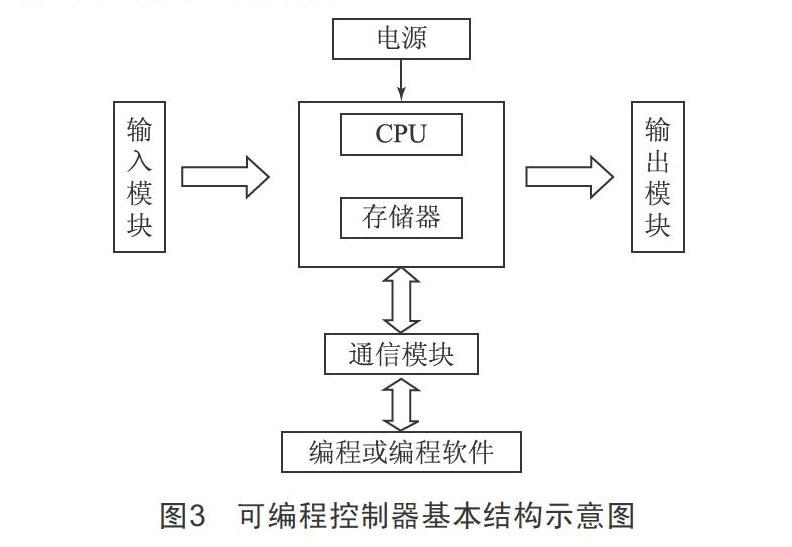
3.1? ? 主控制器設(shè)計
主控制器主要采用計算機結(jié)構(gòu),包括CPU、存儲器、輸入/輸出接口及模塊、通信接口及模塊、編程器和電源[3]。可編程控制器基本結(jié)構(gòu)如圖3所示。
本系統(tǒng)采用Siemens的可編程控制器,型號為ES7312-1AE14-0AB0,采用Siemens的變頻器,型號為V20,采用增量型的角度編碼器,型號為E6B2-CWZ5B。
3.2? ? 硬件電路和梯形圖程序設(shè)計
本系統(tǒng)的輸入口包括主回路啟停、主令控制器各電動機啟停、限位、故障輸入、過電流保護、急停、復位等;輸出口包括主電路電源、復位輸出、急停輸出、各電動機的電源、正反轉(zhuǎn)和變頻器輸出、過電流保護輸出等。
當PLC上電工作時,接通SM0.0,完成初始化。同時在總電路開關(guān)中,當接通啟動開關(guān)I0.0,停止開關(guān)I0.1及閉合過電流保護開關(guān)I0.7常閉觸頭時,總電源輸出開關(guān)Q0.0打開并自保持,整個電路將通電,等待啟動相關(guān)按鈕及其對應(yīng)子程序[4]。
4 模擬訓練系統(tǒng)模型仿真實驗分析
4.1? ? 機電系統(tǒng)聯(lián)調(diào)
電機是一種含有耦合磁場、磁耦合電路,實現(xiàn)機電能量轉(zhuǎn)換或傳遞的電磁裝置。在絕大多數(shù)場合,集裝箱起重機是以三相交流感應(yīng)電機為動力源[5]。
在訓練系統(tǒng)模擬實驗平臺中,采用6 W/380 V的微型交流電光軸電機作為大車、小車、懸臂梁和吊具的動力來源。集裝箱起重機一次工作流程分為調(diào)試準備、開始作業(yè)、停止作業(yè)、結(jié)束。起重機吊具的額定載荷為610 N,吊具在上升與下降過程中受到重物的拉力,對受力地方進行應(yīng)力分析,吊具受到的應(yīng)力法向力大約為610 N。
4.2? ? 模擬訓練系統(tǒng)仿真
港口起重機工作循環(huán)周期如圖4所示。
由圖4可以看出,從T0~T12可以將工作過程分離出7種運動組合[6],分別為:起升加速階段、加速起升和小車回程加速階段、勻速起升和小車回程加速階段、勻速起升和小車勻速階段、減速起升和小車回程勻速階段、小車回程減速階段、卸載階段。
通過對起重機模擬訓練系統(tǒng)載重工作狀態(tài)、空載工作狀態(tài)、停止工作狀態(tài)下的模擬仿真以及部分動力學結(jié)構(gòu)分析,進行了實際操作演示,對仿真結(jié)果進行了驗證,證實了起重機理論分析的合理性[7]。
5 結(jié)論
港口集裝箱起重機模擬訓練系統(tǒng)設(shè)計是基于電氣控制系統(tǒng)、PLC控制系統(tǒng)、鋼絲繩系統(tǒng)、視頻定位系統(tǒng)及無線電磁鐵系統(tǒng),對核心控制系統(tǒng)與原系統(tǒng)相同的模擬訓練控制系統(tǒng)進行了設(shè)計與構(gòu)建,同時運用SolidWorks軟件對訓練系統(tǒng)模型進行三維設(shè)計與搭建,并進行仿真模擬及可行性分析,取得了以下相應(yīng)成果:
(1)制定出模擬系統(tǒng)的總體方案。根據(jù)大型起重機實際功能進行初步研究,確定了以1:66比例進行模型搭建,經(jīng)過各種數(shù)據(jù)分析計算,制定出了一套模擬訓練系統(tǒng)實物,經(jīng)過仿真模擬實驗,認定該方案可行。
(2)選定了驅(qū)動電機、控制裝置等,通過PLC實驗控制平臺,實現(xiàn)了遠程操控起重機工作。通過360°全景監(jiān)控系統(tǒng),實現(xiàn)了對大車、小車、吊具等的實時在線監(jiān)測功能。
(3)通過檢測系統(tǒng),控制交流電機的轉(zhuǎn)速,滿足了大車、小車的速度調(diào)節(jié)和懸臂梁的角度監(jiān)測需求,使起重機工作效率得到有效提升。
[參考文獻]
[1] 王國利.起重運輸機械發(fā)展趨勢[J].中國水運,2005,12(3):42-43.
[2] 吳曉青.PLC控制的變頻器調(diào)速系統(tǒng)在起重機的應(yīng)用[D].廣州:華南理工大學,2005.
[3] 張萬忠,劉明芹.電器與PLC控制技術(shù)[M].2版.北京:化學工業(yè)出版社,2008.
[4] 陳伯時.電力拖動自動控制系統(tǒng)——運動控制系統(tǒng)[M].北京:機械工業(yè)出版社,2011.
[5] 張楠.淺析橋式起重機故障診斷及維修維護[J].中國設(shè)備工程,2017(18):84-85.
[6] 王金諾,張質(zhì)文,程文明,等.起重機設(shè)計手冊[M].北京:中國鐵道出版社,1998.
[7] 邱進東.研究航空活塞發(fā)動機維修成本控制及其管理模式[J].內(nèi)燃機與配件,2019(5):182-184.
收稿日期:2020-06-08
作者簡介:戴孟業(yè)(1999—),男,江蘇淮安人,研究方向:機械電子。
通信作者:黃大志(1977—),男,河南新野人,副教授,研究方向:增材制造。
猜你喜歡
建材發(fā)展導向(2021年6期)2021-06-09 05:57:58
通信電源技術(shù)(2018年5期)2018-08-23 01:16:18
電子制作(2018年10期)2018-08-04 03:24:40
電子制作(2018年2期)2018-04-18 07:13:37
電子制作(2017年10期)2017-04-18 07:22:39
電子制作(2017年19期)2017-02-02 07:08:54
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:49
工業(yè)設(shè)計(2016年12期)2016-04-16 02:52:01
武夷學院學報(2015年3期)2015-07-18 11:03:46
機電信息(2014年20期)2014-02-27 15:53:20
