全方位移動平臺發(fā)展現(xiàn)狀綜述
2020-08-31 01:30:24閆猛飛
價值工程 2020年24期
閆猛飛


摘要:全方位移動平臺機(jī)動靈活的特性適合工作在空間狹小、對場地利用率要求高的場合。本文圍繞全方位移動平臺,從行動機(jī)構(gòu)、關(guān)鍵技術(shù)、存在問題、應(yīng)用現(xiàn)狀等幾個方面進(jìn)行了研究討論,最后展望了其發(fā)展趨勢。
Abstract: The mobility and flexibility of the omni-directional mobile platform is suitable for working in situations where the space is narrow and the site utilization rate is high. In this paper, the omni-directional mobile platform is discussed from the aspects of action mechanism, key technology, existing problems, application status, etc. Finally, the development trend is prospected.
關(guān)鍵詞:全方位移動平臺;麥克納姆輪;全方位履帶
Key words: omni-directional mobile platform;mcnamara wheel;omni-directional crawler
中圖分類號:TH113.22 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻(xiàn)標(biāo)識碼:A ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文章編號:1006-4311(2020)24-0252-06
0 ?引言
全方位移動平臺(Omni-directional mobile platform),能夠任意方向進(jìn)行移動的平臺,在二維平面內(nèi)具有3個自由度,無需任何轉(zhuǎn)向機(jī)構(gòu),便能夠在二維平面內(nèi)進(jìn)行前后(縱向)、左右(橫向)、斜行、零半徑轉(zhuǎn)向等運(yùn)動形式[1]。全方位移動平臺的出現(xiàn),解決了傳統(tǒng)車輛轉(zhuǎn)彎半徑大、空間利用率低、工作效率不高的弊端[2],給需要高性能機(jī)動能力、在狹窄空間作業(yè)的任務(wù)帶來了希望。利用全方位移動平臺獨(dú)特的運(yùn)動特性,搭載不同的功能模塊,比如機(jī)械臂、升降機(jī)構(gòu)等,可將全方位運(yùn)動性能廣泛應(yīng)用于生產(chǎn)生活中的各個領(lǐng)域,提高效率,節(jié)省空間,降低成本。
1 ?行動機(jī)構(gòu)研究
全方位移動平臺獨(dú)特的運(yùn)動方式,關(guān)鍵的一點(diǎn)在于全向行動機(jī)構(gòu)的應(yīng)用。典型的全向行動機(jī)構(gòu)有:麥克納姆輪、連續(xù)切換輪、正交輪、球輪、偏心輪、全方位履帶等。行動機(jī)構(gòu)對平臺的布局形式有決定作用,不同的行動機(jī)構(gòu)通過特定的布局才能使平臺實現(xiàn)全方位運(yùn)動,比如正三角形、十字交叉形、矩形等等。
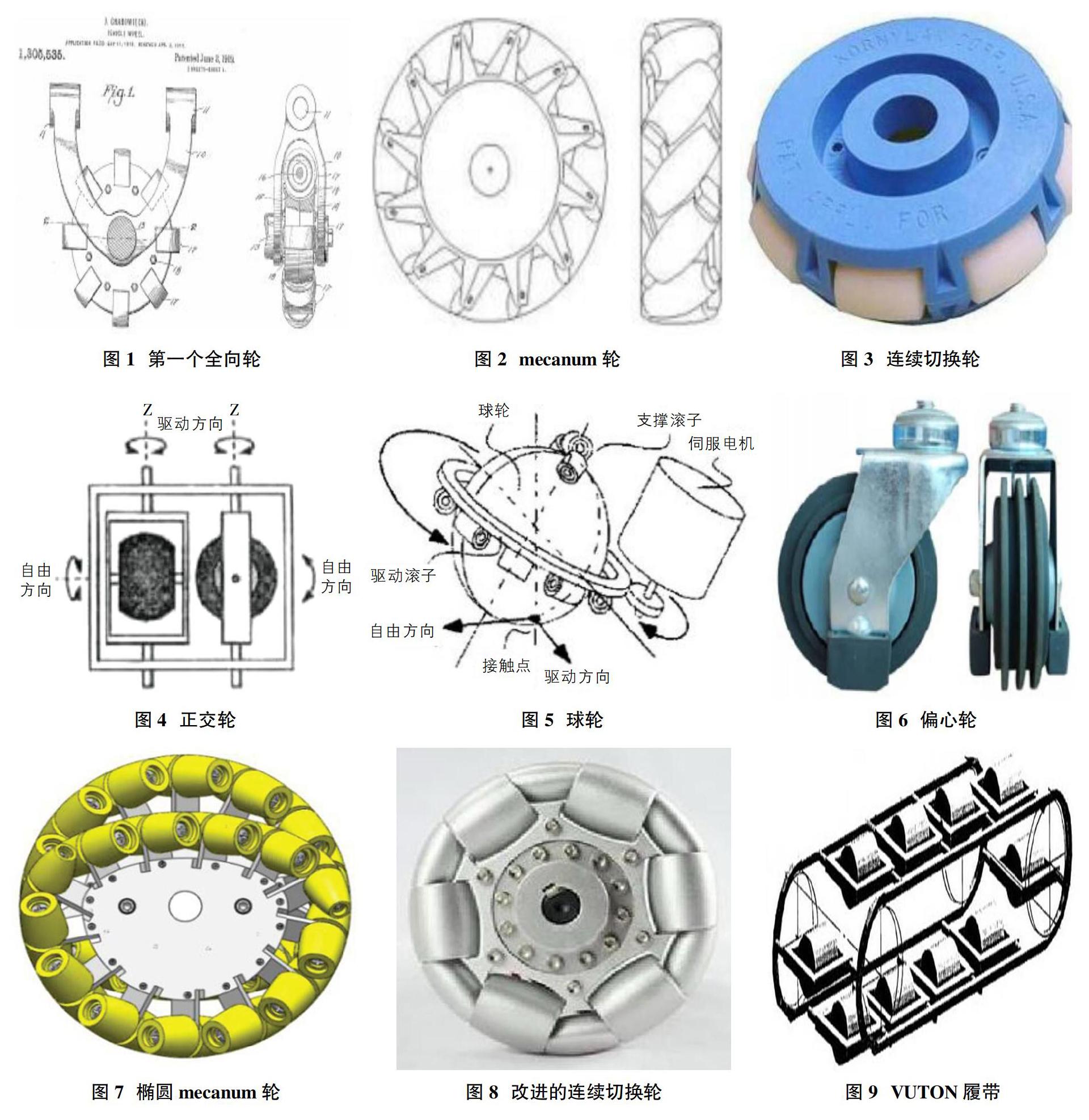
1919年,美國J. Grabowiecki申請了第一個全向輪的專利(圖1),這一點(diǎn)并不廣為人知[3]。該總成由一個主輪和橫向滾輪組成,就像大多數(shù)機(jī)器人世界杯球隊使用的那種。早在1907年,發(fā)明家們就在考慮設(shè)計一種不需要方向盤就能向前或橫向移動的車輛。
麥克納姆輪[4]是1973年瑞典工程師Ilon設(shè)計發(fā)明的(圖2),通過在輪轂外圍均勻排列一圈特殊形狀的輥輪,所有輥輪的外包絡(luò)線形成一個圓形,輥輪軸線與輪轂軸線成一定角度,通常為45度,從而達(dá)到將輪子轉(zhuǎn)動時產(chǎn)生的徑向力轉(zhuǎn)換至輥輪的軸向力,利用多個(通常為4個)輪子的組合驅(qū)動達(dá)到平臺全向移動的效果。第一臺利用麥克納姆輪設(shè)計的全方位移動平臺是1985年卡內(nèi)基梅隆大學(xué)研發(fā)的Uranus機(jī)器人[5]。嚴(yán)格意義上說,基于麥克納姆輪的全向移動平臺真正開始實現(xiàn)了全方位移動的目的,在需要高頻次變換位姿的場景,無需任何轉(zhuǎn)向機(jī)構(gòu),只需要通過4個輪子的轉(zhuǎn)速及轉(zhuǎn)向的配合便能夠到達(dá)任意位置。
1974年,Blumrich發(fā)明了連續(xù)切換輪[6],并投入生產(chǎn)(圖3)。連續(xù)切換輪延續(xù)了麥克納姆輪在輪轂外圈加裝自由滾子的思路,不同的是連續(xù)切換輪輪轂軸心與滾子軸心相互垂直,當(dāng)輪子轉(zhuǎn)動時受力方向與輪子前進(jìn)方向一致,驅(qū)動效率較麥克納姆輪有所改善。連續(xù)切換輪的缺點(diǎn)在于其輪廓曲線是多邊形,導(dǎo)致輪子轉(zhuǎn)動時與地面為點(diǎn)接觸,會產(chǎn)生抖振現(xiàn)象,尤其是轉(zhuǎn)動速度較快時,振動尤為強(qiáng)烈[7]。
1980 年,Bradbury 發(fā)明了正交輪(圖4)并取得其專利。正交輪結(jié)構(gòu)主要由兩個相同大小并切去球冠的,且軸心相互垂直的球型輪子構(gòu)成。運(yùn)動過程中,兩個球行輪交替與地面接觸,因此受地面摩擦力變化較大,導(dǎo)致正交輪的速度以及平臺整體的運(yùn)動精度都受到不同程度的影響,因此正交輪的應(yīng)用范圍受到很大局限性。
球輪[8]主要由滾動球體、驅(qū)動滾子、支撐滾子構(gòu)成(圖5)。來自伺服電機(jī)的驅(qū)動力帶動驅(qū)動滾子,進(jìn)而通過摩擦力帶動滾動球體轉(zhuǎn)動,以此使球輪運(yùn)動。通常利用4個球輪可以實現(xiàn)全方位運(yùn)動。但球輪運(yùn)動時,驅(qū)動球輪前進(jìn)的力是來自地面的摩擦力,受載荷及路面條件的不確定性影響很大,所以球輪的應(yīng)用場景很受限制。
偏心輪(圖6)即所謂的萬向輪,也稱腳輪,按照驅(qū)動方式分為主動腳輪,被動腳輪。我們常見的旅行箱、醫(yī)療急救床等用的都是被動腳輪。Woojin Chung 等設(shè)計了一款雙偏置主動腳輪(有圖),每個輪子用兩個直流無刷電機(jī)控制,分別控制轉(zhuǎn)向和驅(qū)動。主動腳輪的優(yōu)點(diǎn)在于行駛平穩(wěn),路況適應(yīng)性好,不會像麥克納姆輪一樣產(chǎn)生振動;缺點(diǎn)是需要協(xié)調(diào)控制轉(zhuǎn)向電機(jī)和驅(qū)動電機(jī),導(dǎo)致控制難度增大;在做非連續(xù)曲線運(yùn)動時,需要停下來調(diào)整輪子偏轉(zhuǎn)角度,在需要高頻次變換平臺位姿的任務(wù)場景中顯然效率低下;在正常行駛時轉(zhuǎn)向機(jī)構(gòu)會成為額外負(fù)載,降低能量利用效率[9]。
自從發(fā)現(xiàn)全向運(yùn)動的優(yōu)勢之后,研究人員從未停止對全向輪系的研究以及改進(jìn)。Olaf Diegel等為避免由兩端支撐滾子的麥克納姆輪在傾斜或不平整路面上輪轂外緣與地面接觸進(jìn)而導(dǎo)致運(yùn)動不良的情況,將其改為中間支撐滾子結(jié)構(gòu);為了改善輪子的受力情況進(jìn)而提高平臺整體的效率,設(shè)計了可鎖定的滾子以及可旋轉(zhuǎn)的滾子兩種輪子結(jié)構(gòu)[10]。Remirez-Serrano等為了提高平臺越障性能,提出了一種改進(jìn)的橢圓形雙輪麥克納姆輪結(jié)構(gòu)(圖7),實驗證明平臺橫向運(yùn)動時能克服高達(dá)車輪75%的障礙[11]。
Gfrerrer[12]和賈官帥[13]對麥克納姆輪滾子母線進(jìn)行研究,分別利用畫法幾何和解析幾何得出了相同的母線參數(shù)表達(dá)方程。楊銘對比分析了橢圓弧、圓弧、等速螺旋線的理論母線近似效果[14],最終得出圓弧是近似效果最佳的平面曲線的結(jié)論。張學(xué)玲在受力分析的基礎(chǔ)上,通過仿真計算研究麥克納姆輪滾子受載變形后導(dǎo)致的運(yùn)行不平穩(wěn)的問題,提出對滾子的外輪廓進(jìn)行合理的補(bǔ)償設(shè)計[15]。
文獻(xiàn)[16][17]提到了一種改進(jìn)的連續(xù)切換輪(圖8),利用兩種大小不同的輥?zhàn)咏惶媾挪迹@兩種滾子都可以自由轉(zhuǎn)動,所有滾子外圈的投影是一個封閉的圓。由于這種改進(jìn)的連續(xù)切換輪在轉(zhuǎn)動時同地面是連續(xù)接觸的,因此避免了抖振現(xiàn)象的發(fā)生。
哈爾濱工業(yè)大學(xué)機(jī)器人研究所閆國榮等設(shè)計了一種新型全方位輪式移動機(jī)構(gòu)[18],其結(jié)構(gòu)類似于雙排連續(xù)切換輪,通過兩層輪轂外緣的滾子交錯排布,達(dá)到輪子與地面連續(xù)接觸的目的,從而減輕了輪子的抖振;并且輪子主動轉(zhuǎn)動與滾輪從動運(yùn)動相互獨(dú)立,減小了運(yùn)動時的功率損失。
在全方位輪系發(fā)展的基礎(chǔ)上,有學(xué)者結(jié)合傳統(tǒng)履帶機(jī)構(gòu)進(jìn)行適當(dāng)改進(jìn),使之應(yīng)用于全向平臺的行動裝置。
1992年,日本西川等人設(shè)計了一種球輪履帶,利用兩條履帶的差速驅(qū)動帶動球輪的從動運(yùn)動從而實現(xiàn)所設(shè)計機(jī)構(gòu)的全方位運(yùn)動。
1993年,日本Shigeo Hirose等人借鑒transwheel輪的設(shè)計思路設(shè)計出VUTON履帶[19],履帶結(jié)構(gòu)由一對鏈條和若干滾輪構(gòu)成,滾輪軸線與驅(qū)動輪軸線夾角為90度,其特點(diǎn)是與地面接觸面積大,可以承受高強(qiáng)度負(fù)載,但對路面適應(yīng)性較差,難以通過臺階等障礙(圖9)。
2001年,美國Nitin Chhabra 等人設(shè)計出一款混合履帶[20],履帶上的滾輪互相對稱,成人字形布置,通過控制每條履帶的轉(zhuǎn)速及轉(zhuǎn)向,對力矩進(jìn)行矢量合成,達(dá)到各個方向移動的目的(圖10)。混合履帶的好處是,與同等尺寸和規(guī)格的輪式車輛相比增大了接地面積,減小了對地面的壓強(qiáng),越障和通過性能更好。
2002年,Peng Chen等人利用與VUTON履帶相同的原理設(shè)計出全方位自由輪履帶[21],實現(xiàn)了全方位運(yùn)動的同時提高了平臺的越障能力。
國內(nèi),2012年,湖南農(nóng)大李旭等人申請了一項全方位履帶專利[22],在履帶兩側(cè)安裝有用橡膠做的可自由轉(zhuǎn)動的行走輪,行走輪的中心軸線與履帶中心軸線夾角為0~90度。雖然該履帶具備了全方位運(yùn)動的基本條件,但李旭等人在專利中所描述的平臺并不具備嚴(yán)格意義上的全方位移動的性能,平臺橫向移動時必然伴隨著轉(zhuǎn)動(圖11)。
裝甲兵工程學(xué)院張豫南等人發(fā)明了一款全方位移動履帶[23],并申請了專利。該履帶與傳統(tǒng)履帶形式非常相似,具有主動輪、負(fù)重輪、誘導(dǎo)輪、拖帶輪等機(jī)構(gòu),不同的是履帶板表面加裝有帶偏置角的滾輪,滾輪偏置角通常為正負(fù)45度。其優(yōu)點(diǎn)在于將傳統(tǒng)履帶機(jī)構(gòu)行走優(yōu)勢與全方位運(yùn)動優(yōu)勢相結(jié)合,提高了全方位運(yùn)動穩(wěn)定性、運(yùn)動精度以及路面適應(yīng)能力(圖12)。
2 ?關(guān)鍵技術(shù)
全方位移動平臺是一個可擴(kuò)展的應(yīng)用平臺,涉及多種領(lǐng)域研究,包括運(yùn)動控制、導(dǎo)航定位、傳感器信息融合等。
2.1 運(yùn)動控制
全方位移動平臺能夠進(jìn)行橫移、斜行、中心轉(zhuǎn)向及以上運(yùn)動的復(fù)合運(yùn)動等特殊運(yùn)動方式,需要協(xié)調(diào)控制各個行走機(jī)構(gòu)的轉(zhuǎn)向及轉(zhuǎn)速。傳統(tǒng)的機(jī)械傳動及液壓傳動等方式無法實現(xiàn)如此復(fù)雜的運(yùn)動方式。所以目前大多數(shù)全向平臺采用分布式電控的方式,即一個行走機(jī)構(gòu)對應(yīng)一個(無需調(diào)整輪子偏向角)或兩個(需要調(diào)整輪子偏向角)驅(qū)動電機(jī)。其控制算法往往根據(jù)平臺運(yùn)動學(xué)或動力學(xué)模型進(jìn)行確定。對于典型的三輪組結(jié)構(gòu)和四輪組結(jié)構(gòu)來說,其運(yùn)動學(xué)及動力學(xué)模型是不相同的,因此其相應(yīng)的控制算法也不盡相同。在一些對運(yùn)動控制精度有要求的場合,往往還需結(jié)合PID控制、模糊控制、自適應(yīng)控制、滑模控制、神經(jīng)網(wǎng)絡(luò)控制等其中一種或幾種經(jīng)典的控制算法。
2.2 導(dǎo)航系統(tǒng)
導(dǎo)航系統(tǒng)使全方位移動平臺能夠?qū)崿F(xiàn)自主移動,是其向智能化發(fā)展的第一步。導(dǎo)航系統(tǒng)需要完成三項工作:①定位,確定自己在哪兒;②確定自己要去哪兒;③路徑規(guī)劃,即如何去或怎么去。目前常用的導(dǎo)航定位技術(shù)有視覺導(dǎo)航定位、超聲波導(dǎo)航定位、GPS定位、光反射導(dǎo)航定位等,當(dāng)前主流的機(jī)器人定位技術(shù)是SLAM(即時定位與地圖構(gòu)建)技術(shù)。精確的導(dǎo)航定位系統(tǒng)能夠使全方位移動平臺更精準(zhǔn)可靠地實現(xiàn)自主移動。
2.3 傳感器信息融合
傳感器之于全向移動平臺就像眼、耳、鼻、喉之于人。全方位移動平臺要自主實現(xiàn)精確導(dǎo)航、定位、控制或者其他更多的決策處理行動,依賴于內(nèi)部及外部多種傳感器獲取的數(shù)據(jù)信息。對多種傳感器信息的融合處理能夠降低環(huán)境、噪聲等干擾造成的不確定性,提高系統(tǒng)的容錯能力。
3 ?發(fā)展現(xiàn)狀
目前,科研工作者已經(jīng)研發(fā)出了各式各樣的全方位移動平臺,其應(yīng)用涉及醫(yī)療康復(fù)、休閑娛樂、科研教育、工業(yè)生產(chǎn)、軌道交通、倉儲物流、電力、航空航天、國防軍工等多個領(lǐng)域。
雖然可以實現(xiàn)全方位運(yùn)動的行動機(jī)構(gòu)多種多樣,但是當(dāng)前應(yīng)用最廣泛、商業(yè)化最成功的是基于麥克納姆輪的全方位移動平臺。正如很多科學(xué)技術(shù)一經(jīng)發(fā)現(xiàn)便被用于軍事用途一樣,上世紀(jì)80年代,美國海軍便購買了麥克納姆輪的專利,開展軍事領(lǐng)域應(yīng)用研究。直至1996年,美國AIRTRAX公司開始將全方位運(yùn)動技術(shù)在民用領(lǐng)域推廣應(yīng)用。最初,AIRTRAX公司將全方位運(yùn)動技術(shù)應(yīng)用于叉車領(lǐng)域,由于其獨(dú)特的移動方式迅速給這一行業(yè)帶來了新的活力。COBRA TM 是Airtrax公司研制的全向移動剪刀式升降機(jī),是該公司將全向移動平臺和升降機(jī)有機(jī)結(jié)合的另一個創(chuàng)新產(chǎn)品,給高空作業(yè)帶來了極大的方便。受當(dāng)時條件的限制,初期的全方位移動平臺功能比較單一,只有簡單的運(yùn)動、控制等。此后,德國、日本、韓國、中國等國家眾多科研機(jī)構(gòu)和院校相繼加入了對全向移動平臺相關(guān)技術(shù)的研發(fā),加快了全向移動平臺的發(fā)展速度。
德國庫卡公司生產(chǎn)研發(fā)的KMP omnimove[24]重載移動平臺是全方位移動重載領(lǐng)域里的翹楚(圖13)。內(nèi)部搭載激光掃描儀用于環(huán)境監(jiān)控,結(jié)合內(nèi)置軟件和先進(jìn)的控制系統(tǒng)可實現(xiàn)精準(zhǔn)的自主導(dǎo)航和移動;高功率蓄電池和應(yīng)用工業(yè)無線技術(shù)的自給式電源使其不受任何連接的限制;光學(xué)方向控制、定位輔助和機(jī)械導(dǎo)向元件使得KMP omnimove能夠?qū)崿F(xiàn)最大1mm的定位精度,攻克了重載情況下難以精確調(diào)整的難題。利用無線遙控技術(shù)可方便的進(jìn)行操縱。作為移動式平臺,其大小、寬度與長度均可根據(jù)需要進(jìn)行調(diào)整;兩個KMP omnimove進(jìn)行機(jī)械耦合可承載重達(dá)90噸或最長30米的貨物,能夠在狹窄的空間靈活的變換位姿,可同時保證機(jī)動靈活與工業(yè)安全性能。出于教育與共同研發(fā)的目的,庫卡公司將其設(shè)計的youbot移動機(jī)器人技術(shù)開放共享。這是一個利用全方位平臺搭載一個五自由度機(jī)械臂和一個二指加持器的小型機(jī)器人,專門用于研發(fā)和教育。
我國對全方位移動平臺相關(guān)產(chǎn)品的研發(fā)投入較晚,但從目前市場情況來看有后來者居上的態(tài)勢。成都航發(fā)、廣州普華靈動、蘇州歐米麥克、武漢漢迪、東莞松靈、上海匯聚自動化等機(jī)器人科技有限公司都有自己相應(yīng)的成熟產(chǎn)品,服務(wù)范圍包括軌道交通、航空航天、風(fēng)力發(fā)電、物流倉儲、金屬加工等。
成都航發(fā)公司生產(chǎn)的OmniTitan重型全向運(yùn)輸車[25],能夠滿足單車500t以內(nèi)的負(fù)載需求,特別適合大尺寸、大噸位的工件運(yùn)輸,能夠在瀝青、自流平、混凝土、硬土地面上運(yùn)行,路面適應(yīng)能力極強(qiáng),具有自頂升及多車聯(lián)動功能,對于一些特殊工件的搬運(yùn),能夠解決行吊無法完成的難題。目前,其產(chǎn)品主要面向風(fēng)電設(shè)備制造、列車總裝,飛機(jī)總裝等(圖14)。
廣州普華靈動公司生產(chǎn)的單驅(qū)單向潛入式AGV小車[26],其高度只有150mm,相當(dāng)于一個普通手機(jī)的高度,號稱AGV中的潛水艇(圖15),在某些對高度要求較高的場合中便能夠發(fā)揮它的作用。目前該產(chǎn)品已廣泛用于汽配廠、電子廠、服裝廠等物流需求企業(yè)。
上海匯聚公司生產(chǎn)的OMV飛機(jī)引擎安裝設(shè)備[27],配備有高精度直線滑軌、高精度水平滑軌、獨(dú)立四點(diǎn)高精度絲杠以及數(shù)字化控制電腦屏,適用于飛機(jī)制造業(yè)各部件的高精密裝配,在國際上具有領(lǐng)先地位(圖16)。
北京首都機(jī)場應(yīng)用智能全方位移動停車機(jī)器人[28],實現(xiàn)了1分鐘存車2分鐘取車的驚人效率,不僅省去了汽車尋找車位過程中的燃油浪費(fèi),還降低了對停車場基建的要求,減少了燈光和通風(fēng)設(shè)備等產(chǎn)生的能源開支。該機(jī)器人體積小,載重大,續(xù)航長時間,內(nèi)部的感應(yīng)裝置能夠使其自行躲避障礙物,避免車輛剮蹭。據(jù)了解該機(jī)器人將用于新建的大興機(jī)場,繼續(xù)發(fā)揮其出色的性能。
在軌道交通方面,北京衛(wèi)星制造廠自主研發(fā)了一款列車車體轉(zhuǎn)運(yùn)平臺,利用兩臺設(shè)備聯(lián)動控制的形式解決了車體尺寸長、重量大造成的轉(zhuǎn)運(yùn)效率低的難題,很大程度上節(jié)省了裝配空間, 提高了裝配效率(圖17)。其研制的全向移動自動焊接機(jī)器人[29]是我國首臺實現(xiàn)工程化應(yīng)用的、具有自主知識產(chǎn)權(quán)的產(chǎn)品。
在倉儲物流領(lǐng)域,裝甲兵工程學(xué)院聯(lián)合浙江美科斯叉車有限公司研制了全方位移動叉車[30],填補(bǔ)了國產(chǎn)叉車在該領(lǐng)域中的空白。中科院沈陽自動化研究所研制的全向AGV[31]應(yīng)用于自動立體倉庫的運(yùn)輸,能夠集中調(diào)度、實時監(jiān)管,實現(xiàn)了整體的柔性控制。
在國防軍工領(lǐng)域,利用全方位移動平臺搭載升降設(shè)備和調(diào)姿機(jī)構(gòu)可進(jìn)行飛機(jī)彈體及外掛物的快速裝配和拆卸,有效提高部隊?wèi)?zhàn)斗力[32]。
在生活服務(wù)領(lǐng)域,全方位地面移動清掃機(jī)器人[33]可以在家庭和辦公室等場所進(jìn)行清掃作業(yè),方便人們的居家和辦公生活;全向智能垃圾桶[34]利用WiFi通信與用戶手機(jī)進(jìn)行連接,實現(xiàn)自主移動收集垃圾。
在醫(yī)療救護(hù)領(lǐng)域,全方位移動輪椅(圖18)能夠解決老年人及殘障人士行動不便的困擾,全方位傷員轉(zhuǎn)運(yùn)機(jī)器人[35]可應(yīng)用于醫(yī)院或家庭傷員轉(zhuǎn)運(yùn),能夠在傳染病房代替醫(yī)護(hù)人員執(zhí)行相關(guān)工作,結(jié)合機(jī)器人手臂和傳送帶技術(shù)可減少傷員疼痛。
在休閑娛樂領(lǐng)域,利用網(wǎng)紅手表進(jìn)行手勢感應(yīng)控制的全方位移動玩具車適合各個年齡段的人玩,能夠有效緩解工作生活帶來的壓力(圖19)。
在一些特殊危險工況條件下,利用全方位移動平臺搭載相關(guān)功能設(shè)備可有效降低安全隱患,如配電變壓器檢測[36]。
全方位移動平臺經(jīng)過這么多年的發(fā)展,正以其出色的運(yùn)動能力、更加完善的產(chǎn)品功能以及越來越先進(jìn)的智能化水平,逐步被人們應(yīng)用到生產(chǎn)生活的各個方面,提高人們的工作效率以及生產(chǎn)生活水平。
4 ?存在問題
4.1 全方位運(yùn)動對地面條件要求較高,比較苛刻 ?無論何種行駛機(jī)構(gòu),全方位移動平臺是通過每個全向輪力矩的矢量合成實現(xiàn)任意方向移動的,其良好實現(xiàn)的基礎(chǔ)是各個全向輪協(xié)調(diào)配合。在平坦、干凈、整潔的路面上,全方位運(yùn)動效果越好;當(dāng)?shù)孛鏃l件較差時,比如凹凸不平、有砂礫、有水等,會導(dǎo)致其中一個或者幾個輪子與地面接觸不良或是摩擦系數(shù)改變,出現(xiàn)打滑現(xiàn)象,從而無法提供指定輸出轉(zhuǎn)矩或者部分輸出指定轉(zhuǎn)矩,導(dǎo)致合力矩大小或者方向改變,進(jìn)而使運(yùn)動軌跡偏移,運(yùn)動性能降低,特別是在某些需要精確定位的任務(wù)場景中,地面條件的好壞決定了全方位運(yùn)動性能的發(fā)揮。
4.2 全方位移動平臺對自身結(jié)構(gòu)設(shè)計要求更高 ?隨著全方位技術(shù)的不斷發(fā)展,在重載領(lǐng)域的需求將會越來越大,平臺的整體布局設(shè)計應(yīng)該更加緊湊,默認(rèn)呈現(xiàn)對稱幾何特性,整體重心分布盡可能位于其幾何中心位置;負(fù)重載荷盡量均勻布置,以使所有行動輪負(fù)載相同,受力狀態(tài)一致,進(jìn)而達(dá)到協(xié)調(diào)運(yùn)動的目的。
4.3 行走機(jī)構(gòu)對材料耐磨性要求越來越高 ?在重載工況下由于車輪承受壓力變大,且制動功率相應(yīng)變大,對車輪的磨損越來越嚴(yán)重,導(dǎo)致平臺運(yùn)行時行駛狀態(tài)不“連續(xù)”,全方位運(yùn)動性能降低。輪系材料磨損性能的提高將使全方位技術(shù)適應(yīng)更加惡劣的工作環(huán)境,進(jìn)一步擴(kuò)大全方位移動平臺的應(yīng)用領(lǐng)域。
5 ?發(fā)展趨勢
全方位移動平臺已經(jīng)在多領(lǐng)域體現(xiàn)出其不可替代的價值,隨著時代的發(fā)展以及技術(shù)手段的進(jìn)步,未來全方位移動平臺主要呈現(xiàn)出以下發(fā)展趨勢:
5.1 應(yīng)用場景進(jìn)一步擴(kuò)大 ?全方位移動平臺是一個可擴(kuò)展的應(yīng)用平臺,自產(chǎn)生以來,不斷結(jié)合最新的技術(shù)手段,來拓展自身功能,擴(kuò)大應(yīng)用場景,滿足市場需求。目前,全方位移動平臺應(yīng)用場景主要是工廠、倉庫、醫(yī)院、超市、地下停車場等具有結(jié)構(gòu)化路面的室內(nèi)環(huán)境,還未能充分發(fā)揮其潛力優(yōu)勢;未來,隨著新的執(zhí)行功能系統(tǒng)的附加以及全方位移動履帶等新的可適應(yīng)非結(jié)構(gòu)化路面的行走機(jī)構(gòu)的成熟應(yīng)用,全方位移動平臺將會出現(xiàn)在更多的任務(wù)場景中,滿足人們的生產(chǎn)生活需求。
5.2 更強(qiáng)的信息獲取及決策處理能力 ?當(dāng)前,全方位平臺已能夠通過激光、雷達(dá)、紅外、超聲波、圖像等傳感器實現(xiàn)環(huán)境感知、路徑規(guī)劃、自主導(dǎo)航、避障等活動,隨著計算機(jī)技術(shù)及傳感器技術(shù)的進(jìn)步,基于多傳感器信息的融合及決策處理將是全方位平臺發(fā)展的新趨勢。
5.3 智能化程度進(jìn)一步提高 ?當(dāng)前是一個智能化的時代,大數(shù)據(jù)、物聯(lián)網(wǎng)、5G、云計算、人工智能等智能技術(shù)的相互融合推動著我們這個時代由萬物互聯(lián)邁向萬物智能。未來全方位“智能”移動平臺將會在生產(chǎn)生活中發(fā)揮越來越重要的作用。
6 ?結(jié)束語
本文對全方位移動平臺做了一個全面的闡述,對幾種典型的全向行動裝置的結(jié)構(gòu)及優(yōu)缺點(diǎn)進(jìn)行了歸納總結(jié),簡要概述了其關(guān)鍵技術(shù),指出了當(dāng)前存在的問題,介紹了全方位移動平臺的應(yīng)用現(xiàn)狀,最后設(shè)想了其未來的發(fā)展趨勢。隨著科技的不斷進(jìn)步,我們有理由相信全方位平臺的功能將會更加趨于完善,未來我上們將會在越來越多的應(yīng)用場景中看到各種各樣的集成全方位驅(qū)動技術(shù)的產(chǎn)品。
參考文獻(xiàn):
[1]劉勇.狹小空間內(nèi)的全向移動平臺關(guān)鍵技術(shù)研究[D].江蘇科技大學(xué),2016.
[2]呂永健,叢新勇,楊銘.步進(jìn)電動機(jī)驅(qū)動的Mecanum輪全向裝備運(yùn)輸車的設(shè)計[J].微特電機(jī),2013,41(12):14-16,30.
[3]Rojas R. A short history of omnidirectional wheels [J]. IEEE Transactions on Robotics and Automations, 1996, 12 (1):69-72.
[4]陸軍軍. 基于Mecanum輪的集裝箱底板打孔平臺研制[D].南京林業(yè)大學(xué),2015.
[5]Gregg Podnar. The URANUS Mobile Robot[J]. Autonomous Mobile Robots Annual Report, 1985.
[6]楊源鑫.輪式全向移動物流平臺的運(yùn)動學(xué)建模與軌跡跟蹤控制[D].北京印刷學(xué)院,2017.
[7]趙冬斌,易建強(qiáng),鄧旭玥.全方位移動機(jī)器人結(jié)構(gòu)和運(yùn)動分析[J].機(jī)器人,2003(05):394-398.
[8]West M, Asada H. Design and control of ball wheel omnidirectional ehicles[C]// IEEE International Conference on Robotics & Automation. IEEE, 1995.
[9]Chung W, Moon C B, Jung C, et al. Design of the Dual Offset Active Caster Wheel for Holonomic Omni-directional Mobile Robots[J]. International Journal of Advanced Robotic Systems, 2011, 7(4):101-106.
[10]Olaf Diegel, Aparna Badve, Glen Bright, et al. Tlale, Improved Mecanum Wheel Design for Omni-directional Robots[C]// 2002.
[11]Ramirez-Serrano A, Kuzyk R. Modified Mecanum Wheels for Traversing Rough Terrains[C]// Sixth International Conference on Autonomic & Autonomous Systems. IEEE, 2010.
[12]Gfrerrer A. Geometry and kinematics of the Mecanum wheel[J]. Computer Aided Geometric Design, 2008, 25(9):784-791.
[13]賈官帥.基于Mecanum輪全方位移動平臺的理論和應(yīng)用研究[D].浙江大學(xué),2012.
[14]楊銘,呂永健,叢新勇.Mecanum輪幾何結(jié)構(gòu)與輥?zhàn)幽妇€近似方法[J].機(jī)械設(shè)計與研究,2014,30(05):76-79,83.
[15]張學(xué)玲,侍才洪,康少華,胡軍中.Mecanum萬向輪滾子外輪廓曲面變形補(bǔ)償設(shè)計[J].中國工程機(jī)械學(xué)報,2014,12(03):213-217.
[16]Paromtchik I E , Asama H . A motion generation approach for an omnidirectional vehicle[C]// IEEE International Conference on Robotics & Automation. IEEE, 2002.
[17]Kyung-seok Byun, Sung-jae Kim, Jae-bok Song. Design of continuous alternate wheels for omnidirectional mobile robots[J]. 2001.
[18]閆國榮,張海兵.一種新型輪式全方位移動機(jī)構(gòu)[J].哈爾濱工業(yè)大學(xué)學(xué)報,2001(06):854-857.
[19]Hirose S, Amano S. The Vuton: High Payload, High Efficiency Holonomic Omni-Directional Vehicle[C]. Proceedings of 6th International Symposium on Robotics Research. IFRR, 1993: 253-260.
[20]CHHABRA NITIN (US), WILKINSON STUART (US). Hybrid track for a vehicle[P]. :US6179073,2001-1-30.
[21]Chen P, Koyama S, Mitsutake S, et al. Automatic running planning for omni-directional robot using genetic programming[C]// IEEE International Symposium on Intelligent Control. IEEE, 2002.
[22]李旭,謝方平,劉大為,黃利,葉強(qiáng),袁開放. 一種全方向移動履帶[P].CN102756764A,2012-10-31.
[23]張豫南,黃濤,顏南明,張健,尚穎輝,李年裕,李瀚飛,蔡志遠(yuǎn),王雙雙,田鵬,閆永寶,趙玉慧,孫曉雨,吳中堅,李輝,張舒陽,王恒.全方位移動履帶[P].CN103043128A,2013-04-17.
[24]http://c.gongkong.com/kukachina02/p95664.html.
[25]http://www.hangfa.com/omnititan/omnititan.html.
[26]http://www.sinorobot.co/displayproduct.html?id=2681648986047888.
[27]http://www.hictrl.com.cn/hangkongzhizhaoomv/omv2.shtml.
[28]https://www.jiqirentv.com/car-parking-robot.html.
[29]國內(nèi)首臺實現(xiàn)工程化應(yīng)用的全向移動自動焊接機(jī)器人亮相2015世界機(jī)器人大會[J].金屬加工(熱加工),2015(24):1.
[30]https://www.chinaforklift.com/news/detail/200910/25366.html.
[31]AGVS產(chǎn)品及其應(yīng)用[J].機(jī)器人技術(shù)與應(yīng)用,1999(04):13-15.
[32]朱治國.基于全向智能移動平臺的掛彈車設(shè)計[J].數(shù)字化用戶,2013(31):73-74.
[33]高學(xué)山,徐殿國,王炎,周大威.全方位地面移動清掃機(jī)器人[J].機(jī)械工程學(xué)報,2008(03):228-233.
[34]吳劍英,平雪良,張逸倫,陳祥,馬博琳,劉家威.全向輪智能垃圾桶設(shè)計[J].現(xiàn)代制造技術(shù)與裝備,2019(01):47-48.
[35]李洪振,侍才洪,李瑞欣,張西正.一種傷員換乘轉(zhuǎn)運(yùn)機(jī)器人的研究設(shè)計[C].天津市生物醫(yī)學(xué)工程學(xué)會、天津市第三中心醫(yī)院.天津市生物醫(yī)學(xué)工程學(xué)會第三十四屆學(xué)術(shù)年會論文集.2014:89.
[36]朱孟周,周志成,曾強(qiáng),等.基于全向智能移動平臺的配電變壓器柔性檢測系統(tǒng)設(shè)計[C]// 中國電機(jī)工程學(xué)會高電壓專業(yè)委員會學(xué)術(shù)年會.2015.
