雷達-紅外分布式融合多目標跟蹤算法
2020-08-31 01:35:16張萬順張安清齊海明
無線電工程 2020年9期
關鍵詞:融合
張萬順,張安清,齊海明
(1.海軍大連艦艇學院 學院五大隊, 遼寧 大連 116018;2.海軍大連艦艇學院 信息系統系, 遼寧 大連 116018;3.海軍91202部隊,遼寧 葫蘆島125004)
0 引言
現代化戰爭條件下,信息能的釋放將直接影響軍隊的作戰能力,信息的采集和處理能力至關重要。雷達由于能夠提供完整的目標位置信息和多普勒信息,成為戰場上信息采集的重要傳感器,但隨著電子對抗、反輻射導彈、超低空突防和隱身戰機等技術的發展,其探測能力和生存空間受到限制,單一類型的傳感器探測系統已無法適應現代戰場的復雜環境。相比之下,紅外傳感器作為被動傳感器,無需向外輻射能量,天生具有“四抗(電子對抗、反輻射導彈、超低空突防、隱身戰機)”的優勢,具有高精度角度量測等優點,但存在無法獲得目標距離信息,受大氣影響大等不足。將二者結合可以優勢互補,大大提高探測系統的魯棒性以及對目標的跟蹤能力。
現有的雷達紅外數據融合算法多為集中式融合結構[1-4],文獻[4]采用激光雷達測距為紅外傳感器補充距離信息完成目標跟蹤,紅外傳感器無法在無線電靜默時單獨完成跟蹤任務,同時集中式融合結構通信代價高,容易出現單點錯誤,網絡延展性差。現有的分布式融合結構的多目標跟蹤算法,多采用傳統的目標跟蹤算法(如卡爾曼濾波及其擴展算法),需要進行復雜的點跡關聯和數據對準[5-6],文獻[7-8]討論了同質傳感器分布式融合的PHD濾波算法。
采用分布式融合結構對雷達紅外異質傳感器數據進行融合,使探測器具有獨立處理信息的能力,傳送獨立處理后的數據給融合中心,降低探測系統的通信量,增強系統的可靠性。對于雷達傳感器,在直角坐標系和修正球坐標系(Modified Spherical Coordinates,MSC)結合的混合坐標系中引入GM-PHD濾波,實現多目標跟蹤的同時避免了傳統多目標跟蹤算法復雜的點跡關聯過程[9],在直角坐標系中進行狀態預測,在MSC中進行狀態更新,使得量測方程和觀測方程均為線性方程,且解決了量測噪聲因坐標系轉換而產生的相互耦合。對于紅外傳感器,在MSC中成功引入GM-PHD濾波,使紅外傳感器可以獨立實現對多目標角度信息進行跟蹤。雷達和紅外的更新過程都是在修正球坐標系中完成的,便于將紅外傳感器的狀態估計值作為量測值與雷達量測進行融合。
1 雷達混合坐標系GM-PHD濾波
在直角坐標和修正球坐標結合的混合坐標系中使用GM-PHD濾波,實現在目標數目可變情況下的多目標跟蹤,并對目標數目進行估計。
1.1 GM-PHD濾波
PHD濾波用基于隨機有限集的Bayes濾波解決多目標跟蹤問題[10-11],其物理意義是狀態空間中目標數的后驗強度,其在狀態空間的積分為目標個數,目標狀態則為對應峰值。其預測和更新方程如下:
ps,k(ξ)fk|k-1(x|ξ)]Dk-1(ξ)dξ,
(1)
Dk=[1-pD,k(x)]Dk|k-1(x)+
(2)
式中,Dk|k-1(x)為多目標先驗密度pk|k-1(x|zk-1)的PHD;x為k時刻單個目標狀態;ξ為k-1時刻單目標狀態;γk(·)為新生目標PHD;βk|k-1(·|·)為衍生目標RFS的PHD;ps,k為目標存活概率;gk(·|·)為單個目標似然函數;pD,k(·)為目標的檢測概率;κk(z)為雜波PHD函數。
GM-PHD濾波算法的運動模型和觀測模型都是線性的,量測噪聲和過程噪聲均服從高斯分布。此時觀測空間內所有目標狀態以高斯波的形式在狀態空間疊加,形成全局PHD,表示為:
GM-PHD濾波算法的預測和更新方程如下:
Dk|k-1(x)=DS,k|k-1(x)+DD,k|k-1(x)+γk(x),
(3)
等式右側三項分別為存活目標、衍生目標和新生目標的預測PHD。
(4)
等式前項表示漏檢目標的 PHD,后項表示檢測到目標的更新 PHD。
1.2 混合坐標系雷達跟蹤
在直角坐標系中進行狀態預測,將預測狀態轉換成MSC,在MSC中進行狀態更新,避免了因坐標系轉換引起的非線性問題和量測噪聲相互耦合問題。直角坐標系中離散線性狀態預測方程:
(5)

MSC中狀態觀測方程:
(6)

在MSC中,可充分利用雷達精準的距離量測和多普勒信息。直角坐標系和MSC的轉換過程如下:
Y=LD-M(X),X=LM-D(Y),
(7)
(8)
協方差陣的轉換關系為:
(9)
(10)
PHD的均值和協方差的遞推可使用Kalman濾波原理。
2 修正球坐標系紅外跟蹤與數據融合
紅外探測系統可以通過載機機動實現目標距離觀測[12],只是條件較為苛刻。在MSC中,前5個狀態分量均可實時觀測或計算[13],當距離信息不可觀測時,前5個狀態分量與不可觀測的第6個分量自動解耦,使得Kalman濾波接近無偏。在MSC中使用GM-PHD濾波實現單站紅外傳感器多目標純角度跟蹤,將紅外估計值與雷達量測在融合中心進行時間配準并關聯融合,用于對雷達狀態預測的更新。
2.1 修正球坐標系紅外角度跟蹤
MSC中線性狀態方程為:
(11)

觀測方程為:
(12)

2.2 雷達紅外數據融合
分布式雷達紅外融合跟蹤結構如圖1所示。
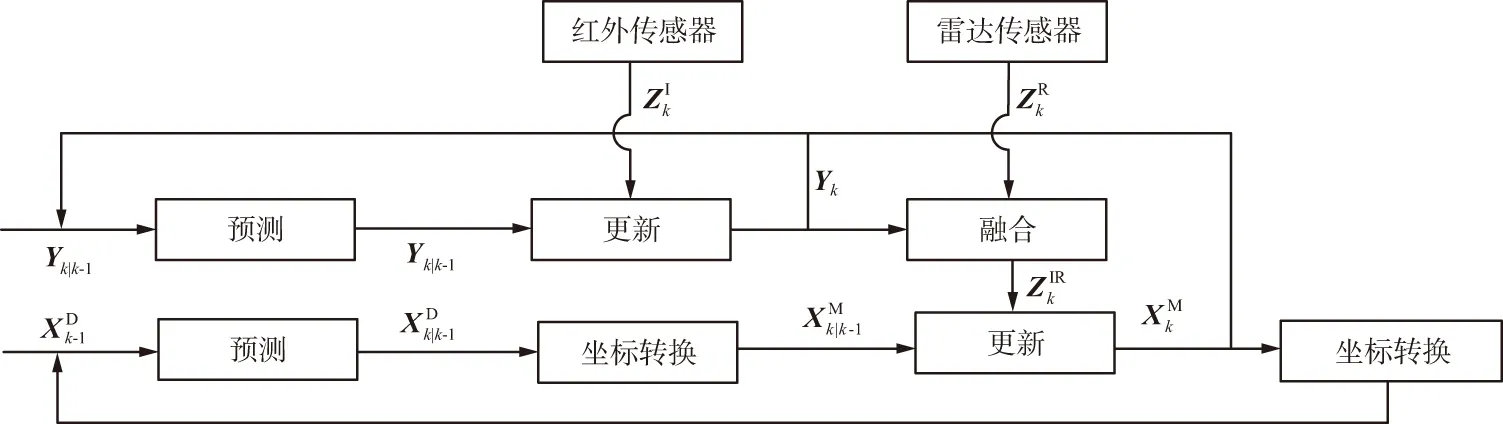
圖1 雷達紅外分布式融合跟蹤結構Fig.1 Tracking structure of radar-infrared distributed fusion
雷達和紅外傳感器可單獨實現濾波估計,紅外傳感器的狀態估計值可以用觀測矩陣提取出與雷達量測相對應的狀態分量,與雷達量測進行時間對準。關聯融合后,用融合量測值更新在MSC中的狀態預測值,如果因雷達傳感器漏檢等原因使得關聯失敗,則可以直接用未經過融合的量測或紅外估計值更新雷達狀態預測,可大大降低探測系統漏檢的可能性,更新得到的系統估計值返回給雷達和紅外傳感器進行下一時刻的濾波估計。
定義一個統計量:

(13)
(14)
(15)

3 分布式融合仿真
3.1 仿真參數設定
因紅外傳感器單站不易獲得目標距離信息,目前只適合非機動或弱機動目標的角度跟蹤,可適用于跟蹤遠距離機動概率低的目標,所以此次仿真選擇對勻速目標進行跟蹤。假定檢測區域中先后存在3個目標,目標信息如表1所示。
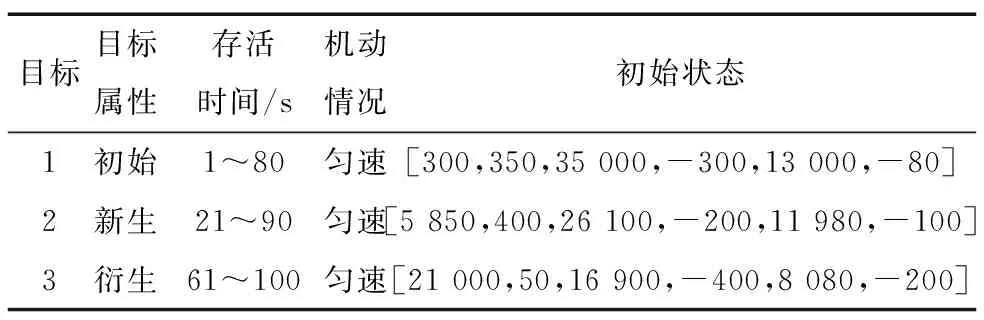
表1 目標信息Tab.1 Target information
監控時間100 s,采樣間隔時間T=1s,假定雷達和紅外傳感器同地配置使用,仿真時雷達量測噪聲協方差矩陣為:
紅外傳感器量測噪聲方差陣為:
雷達過程噪聲協方差陣為:
噪聲控制陣為:
紅外過程噪聲協方差陣為:
噪聲控制陣為:
雷達初始狀態協方差為:
PR=diag[100,1,100,1,100,1]。
紅外初始狀態協方差為:
0.000 000 3 0.000 005 0.000 000 001)。
檢測概率和存活概率設為0.98,雜波數符合均值為10的泊松分布,狀態合并門限設為5,量測融合門限cor=3,最大高斯數100,用最優子模式分配(OSPA)距離進行性能評估[15],c=10,p=2。
3.2 仿真結果分析
圖2是使用表格1目標信息在三維空間建立的目標航跡以及雜波量測。
雷達紅外融合的目標位置估計如圖3所示。
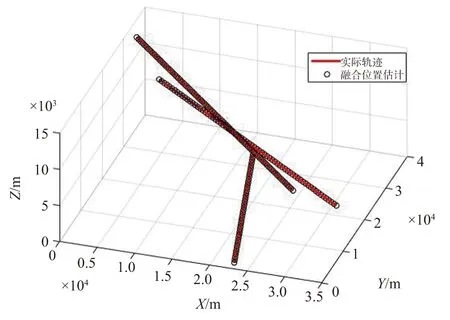
圖3 雷達紅外融合多目標位置估計Fig.3 Multi-target position estimation of radar-infrared fusion
由圖3可以看出,該融合跟蹤方法能夠在雜波環境中且目標數目可變的情況下實現多目標跟蹤。
用目標的角度數據畫出的目標角度軌跡和角度估計如圖4所示。紅外傳感器可利用系統反饋信息或獨立完成目標角度跟蹤,圖中顯示該方法可很好的對多個目標角度信息進行跟蹤。
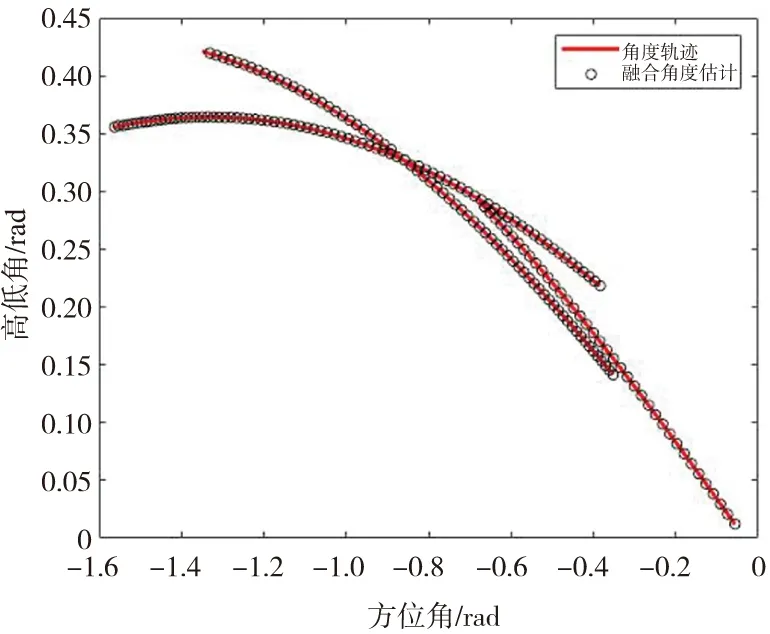
圖4 雷達紅外融合多目標角度估計Fig.4 Multi-target angle estimation of radar-infrared fusion
目標個數估計和OSPA距離統計如圖5所示。
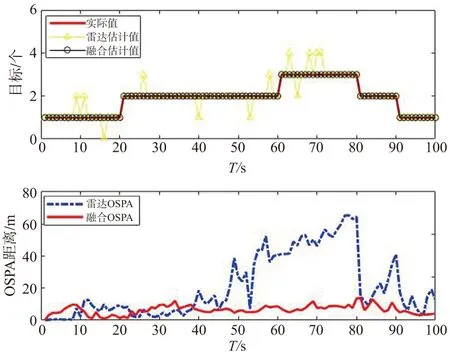
圖5 目標個數估計和OSPA距離統計Fig.5 Target number estimation and OSPA distance statistics
目標個數估計部分顯示,雷達獨立跟蹤會偶爾出現漏檢或虛警,融合跟蹤則大大降低了目標的漏檢概率并大幅提高量測精度,可以對目標數目進行準確的估計,OSPA距離統計部分顯示,當目標個數增加時,雷達傳感器的跟蹤精度受影響較大,而融合算法卻能始終保持優良且穩定的跟蹤精度。
4 結束語
現代戰場電磁環境復雜,為了獲得穩定可靠的多目標跟蹤效果,異質傳感器的數據融合受到廣泛關注。現有的融合方式多采用集中式結構或傳統濾波算法,本文提出雷達紅外分布式融合多目標跟蹤算法,采用GM-PHD濾波在混合坐標系和MSC中使雷達和紅外傳感器各自獨立完成多目標跟蹤,解決了因坐標系轉換造成的非線性問題及量測噪聲耦合問題,同時使得雷達紅外量測在同一坐標系中以便于融合。仿真試驗表明,雷達紅外均可獨立的完成多目標跟蹤任務,二者配合使用取得了更加穩定更高精度的跟蹤效果,大大提高了跟蹤系統的可靠性和魯棒性。
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
數學年刊A輯(中文版)(2022年4期)2022-02-16 08:17:34
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
無線電通信技術(2021年4期)2021-07-13 08:58:28
無線電通信技術(2021年3期)2021-06-08 03:33:48
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
福利中國(2015年4期)2015-01-03 08:03:38