高精度四軸自動搬運機器人實驗平臺的設計與分析
2020-08-25 09:08:54陳修龍李勁文盛永超
實驗室研究與探索 2020年6期
關鍵詞:模態
陳修龍, 李勁文, 盛永超
(山東科技大學機械電子工程學院,山東青島266590)
0 引 言
目前,工業機器人廣泛應用于工業生產制造及物流等行業中,尤其是搬運機器人以其智能化、高效率及和諧的人機交互[1]等特點,在自動化搬運作業中受到了極大的歡迎,能極大地提高勞動生產效率,使企業在市場競爭中具有更大的優勢和競爭潛力。
美國AMF公司研發出一款名叫Versatran的應用于工業生產的機器人,其機械手結構在工作過程中可以完成腰部的圓周整轉動作,在豎直方位上的升降動作,以及工作空間范圍內的伸縮運動[2]。日本安川公司研發的名為MPL160的堆疊機器人末端執行器的負載能力高達160 kg[3],其末端重復定位精確度可達到±0.5 mm。德國KUKA公司對機器人的開環式結構框架脫離了有線控制,使機器人操作更加方便、更加智能化,并將三維空間物體辨別系統應用到了機器人視覺領域[4-5]。而在國內工業機器人的研究中,王琪等[6]利用Adams對搬運機器人的桿長進行參數化設計,從而實現搬運機器人機構的優化設計。楊國軍等[7]提出了一種以模糊原理為基礎的遺傳算法,并基于此遺傳算法提出了機械手末端軌跡規劃的時間最優設計方案。白晶等[8]設計了能夠應用于4自由度碼垛搬運機器人的模糊PID控制算法,有效地改善了多軸機器人控制器的控制精度。王占軍等[9]利用Ansys中模態分析板塊,對碼垛機器人的三維模型進行模態和振型分析,找出機器人在工作時的脆弱環節,為優化構型提供理論基礎。
本文設計了一種有效載荷15 kg的四軸4自由度自動搬運機器人平臺,能夠高速、高精度地完成任務。首先對整體機構進行結構設計,通過利用Solidworks對機器人進行三維建模,然后將三維模型導入Adams中進行運動仿真,得到各驅動桿件和末端旋轉臺的工作轉矩和運動學特性,根據工作轉矩對電機類型進行選擇。運用Ansys有限元仿真對機器人關鍵桿件和脆弱部位進行剛度和強度校核,保證整個機構在額定工作狀態下運行的可靠性和穩定性。
1 機器人平臺3D模型的建立
高精度四軸自動搬運機器人由底座、旋轉臺、末端執行器和3個主桿以及3個連接桿組成。初定搬運機器人的主要技術參數如下:搬運次數12次/min,最大行程1 800 mm,本體質量160 kg,有效載荷15 kg,底座限位范圍±360°,J1 限位范圍+105°,-50°,J2 限位范圍+105°,-25°,J3 限位范圍±168°,定位精度1 mm。由此可確定各運動桿件及連桿的旋轉中心距:主桿1為625 mm,主桿2為620 mm,連桿1為610 mm,連桿2為260 mm。
設計建立的機構三維模型如圖1所示。

圖1 高精度四軸自動搬運機器人三維模型
2 機器人平臺驅動裝置選型
電動機作為一個運動機構中非常重要的組成部分,它的選型要綜合考慮各方面的要求,以此來保證機構能夠發揮出電動機的所有工作性能[10]。電動機的選型原則主要包含下列幾個方面:①機構運行時,其連續工作轉矩需小于電動機的額定扭矩;②瞬時最大轉矩要小于電動機的最大扭矩;③運動件的連續工作速度小于電動機的額定轉速;④負載慣量要與轉子慣量在數值上相匹配[11]。
將機構模型導入Adams中進行正解仿真分析,給定一個門型工作軌跡,通過仿真,得到4個驅動轉動副的轉矩變化如圖2~4所示。

圖2 旋轉臺轉矩變化圖
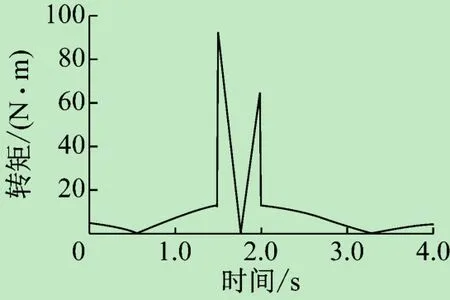
圖3 主桿1轉矩變化圖

圖4 主桿2轉矩變化圖

圖5 末端轉矩變化圖
由機構工況可知,旋轉臺及主桿是在一個很短的時間達到一個速度峰值,而后為了使其停止,就需要通過扭矩控制給予其一個方向轉矩。由上面轉矩變化圖可知,旋轉臺所需最大驅動轉矩為313 N·m,主桿1所需最大驅動轉矩95 N·m,主桿2最大驅動轉矩36 N·m,末端最大轉矩0.34 N·m,所以旋轉臺、主桿1和2、末端執行器的驅動轉矩要分別大于313、95、36、0.34 N·m。底座選用IS型蝸輪蝸桿減速器,減速比為17,主桿和末端都選用諧波減速器,減速比分別100、80、100,則

式中:Mq為電動機轉矩;Md為桿件最大驅動轉矩;i為減速器減速比;η為該轉動副處電機輸入至桿件輸出的效率(旋轉臺處效率為75%,其余各處均為80%)。
根據式(1)可得到旋轉臺處電動機需要的額定轉矩不小于24.55 N·m,主桿1的驅動電動機的額定轉矩不小于1.25 N·m,主桿2處電動機的額定轉矩不小于0.56 N·m,末端執行器處的電動機轉矩須大于4.25 μN·m。對于電動機的功率,有

式中:P為電動機功率;F為工作壓力;v為工作行程速度。根據式(2)和各桿件最大轉速可分別得到旋轉臺、桿件、末端處電動機的大致功率:4,1,0.6,0.05 kW。由此選得電動機如表1所示。
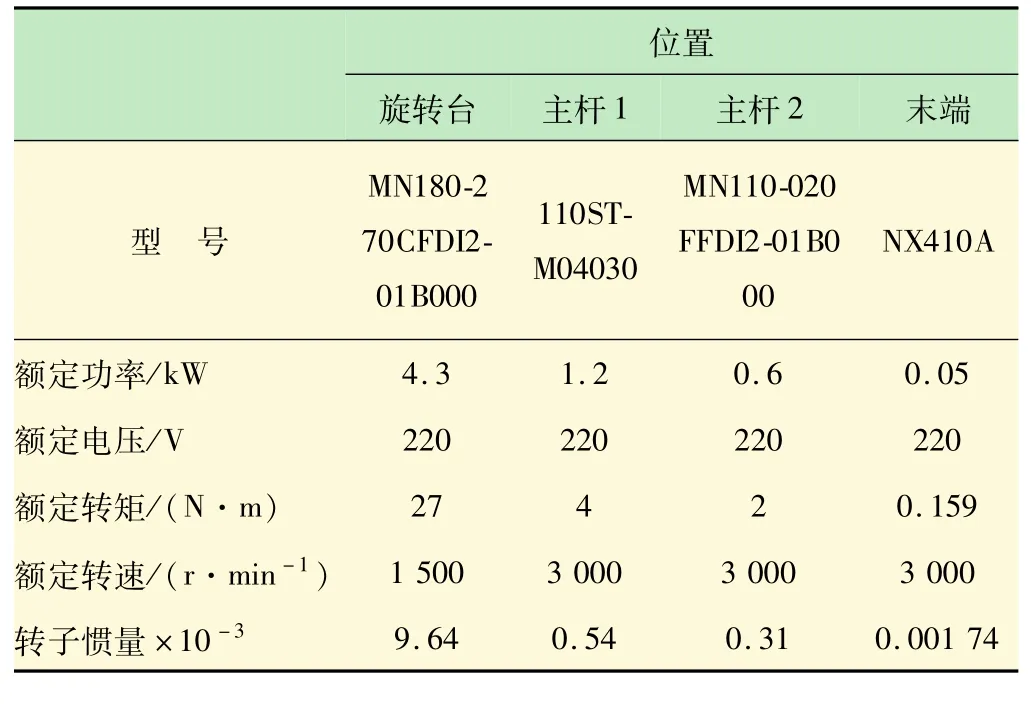
表1 四軸驅動機器人所選取的電機及其參數
3 機器人平臺運動學仿真
Adams軟件是一種在機構運動學和動力學分析廣泛應用的軟件,能夠集建模、求解、可視化技術為一體[12],進行機構的動力學及運動學仿真分析時,能清晰地了解到機械系統的運動性能[13]。
通過Adams仿真得到3個主要運動件的角位移、角速度、角加速度圖,如圖6~8所示。
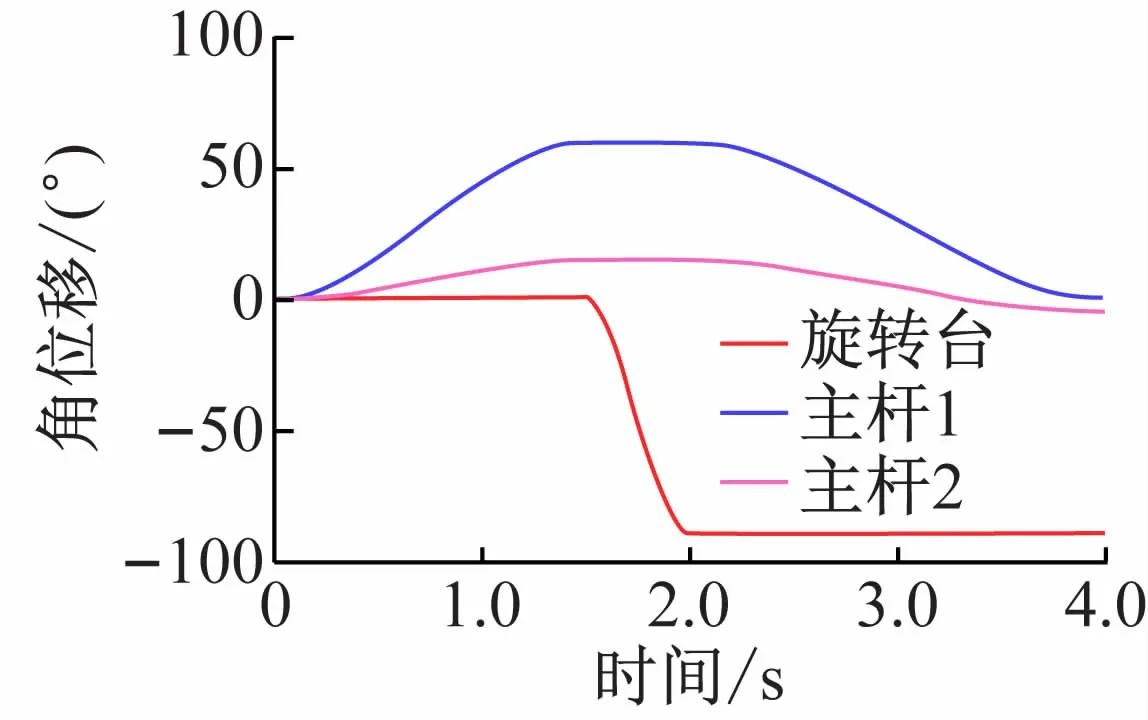
圖6 旋轉臺、主桿1、主桿2角位移
由圖可知,旋轉臺的角位移變化范圍在0~-90°,角速度變化范圍是0 ~270°/s,角加速度變化范圍為0~2 100°/s2;主桿1的角位移變化范圍在0~60°,角速度變化范圍在0~60°/s,角加速度變化范圍在0~158°/s2;主桿2的角位移變化范圍是-5~15°,角速度變化范圍在0~15°/s,角加速度的變化范圍是0~40°/s2。速度、位移曲線走勢平緩,在給定運行軌跡時,不會發生震動,有較好的運動性能。

圖7 旋轉臺、主桿1、主桿2角速度
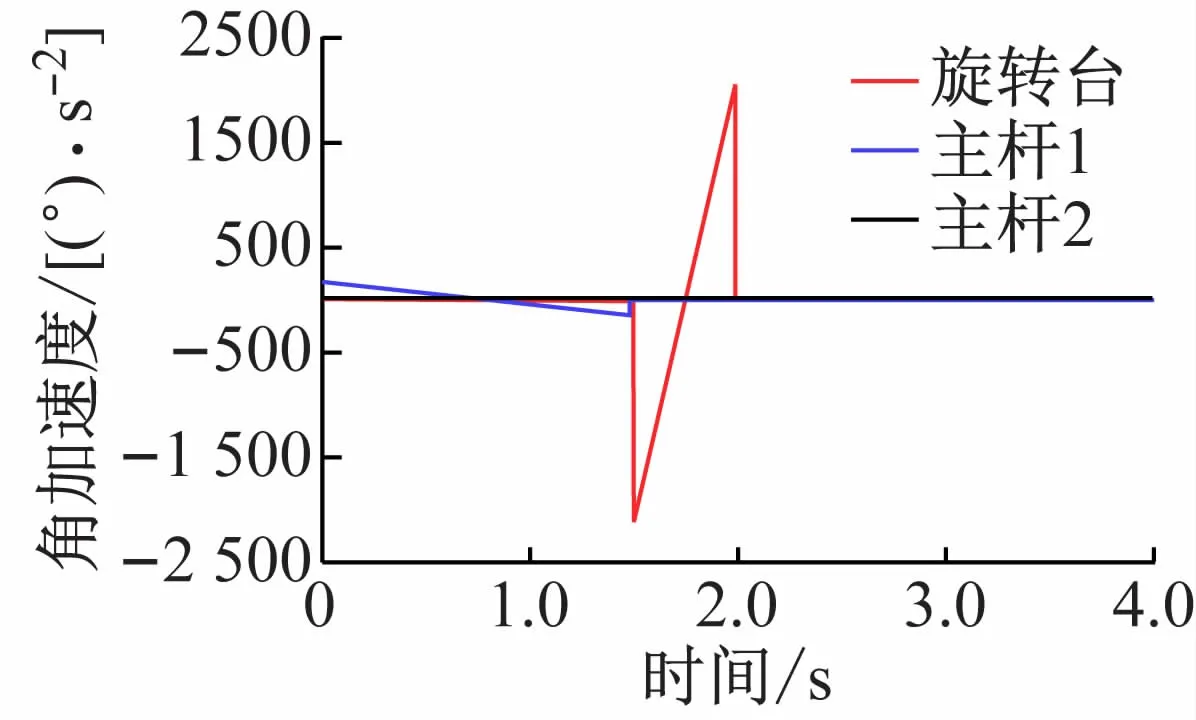
圖8 旋轉臺、主桿1、主桿2角加速度
4 機器人平臺有限元仿真及模態分析
在整個機構的運行過程中,為確保末端執行器能夠精準地完成工作任務,各運動件的剛度和穩定性十分重要,其中主桿1、2,底座等關鍵部位的結構強度更是重中之重。通過仿真其極限工況,得到其應力變形圖,分析最大應力及變形程度。判斷是否超出所選材料的許用應力范圍,檢驗機構模型的合理性[14]。
底座主要受力位置在上端面放置軸承處,主桿1處的轉矩和受力來源于減速器傳遞的轉矩,通過仿真對此部位進行應力與變形分析。底座與主桿材料均選用鋁銅合金ZL201,屈服強度最小值為330 MPa,取安全系數為3,則其許用應力為110 MPa。根據轉矩及受力圖,給定底座一個1.5 kN的壓力;在主桿1上端軸孔處添加525 N的軸承載荷,通過仿真得到變形與應力分布圖,如圖9~12所示。

圖9 底座變形分布圖

圖10 底座應力分布圖

圖11 主桿1變形分布圖
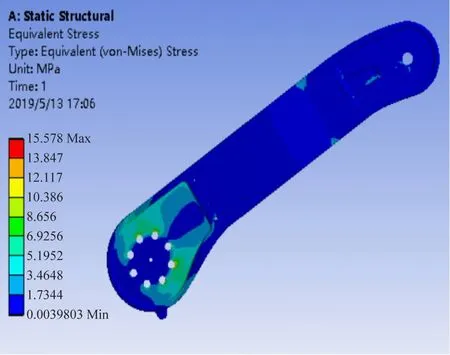
圖12 主桿2應力分布圖
由圖可知,底座最大變形量僅0.003 5 mm,主桿1的變形量最大為0.162 2 mm,結構合理;底座最大應力為0.541 MPa,主桿1 最大應力為15.578 MPa,遠小于許用應力,滿足強度條件。
機器人結構的動態特性對其精度和可靠性也會產生很大的影響[15],搬運機器人在工作過程中需要實現前進后退等動作,并在夾取貨物過程中會有升降、旋轉等動作,因此其在工作過程會出現晃動振動的現象,所以有必要深入了解其動態特性,這可以為其結構的合理設計與改進提供理論依據。對受力最大的桿1進行模態分析,將模型導入Ansys中,求解得其各階頻率及模態對應的振型圖,如圖13~19所示。

圖13 主桿1前6階固有頻率

圖14 主桿1一階模態振型
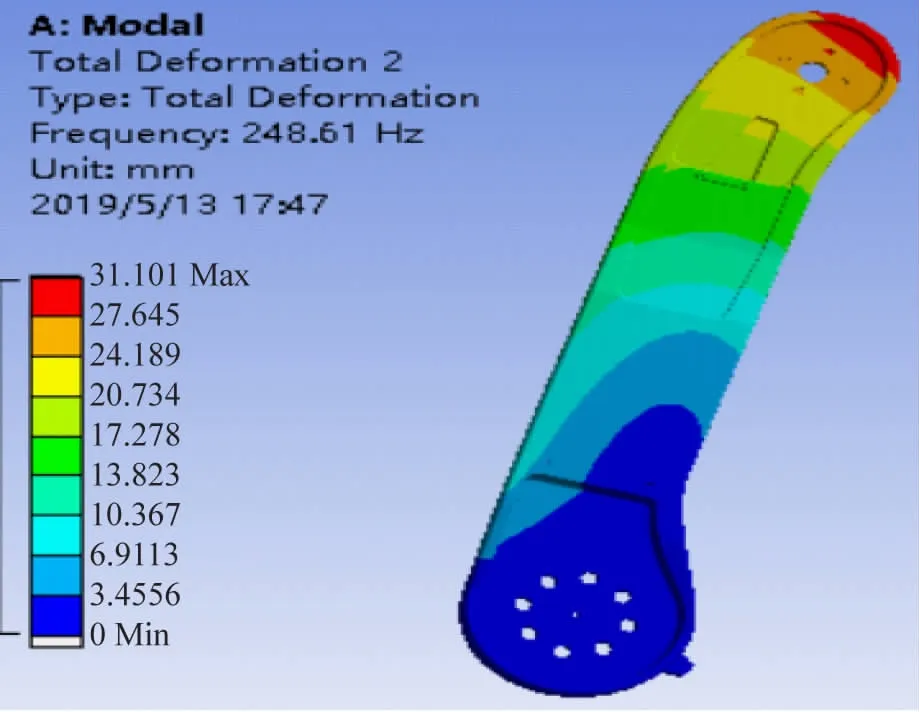
圖15 主桿1二階模態振型

圖16 主桿1三階模態振型

圖17 主桿1四階模態振型

圖18 主桿1五階模態振型

圖19 主桿1六階模振型
從圖可以看出,前3階主要是主桿1上端在XZ平面的振動,即上端在XZ平面出現偏移,將會影響末端執行器前進后退的運行精度,因此需要著重考慮主桿1上端在XZ平面的共振問題。后3階中,主桿1在Z軸方向上出現了明顯的扭轉現象,對整個機構的穩定性產生重大影響,若在此模態發生共振將會使整個裝置上部穩定性變差。由上可知,主桿1上部是主要的動態特性影響因素,需要適當增加厚度或提高材料剛度來改進。
5 結 語
本文設計了一種高精度四軸自動搬運機器人平臺,首先對機構整體的結構和尺寸參數進行設計;再利用Adams進行機構的動力學與運動學仿真,得到裝置構件在運行過程中的位移、速度、加速度和力以及轉矩曲線圖,由受力和轉矩對機構所需的驅動裝置進行選擇;用Ansys對關鍵零部件進行應力、變形及模態分析,校核其剛度和強度,保證整個裝置在運行過程中的安全性和可靠性。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36
