特種光纖熔接機(jī)高速推進(jìn)系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2020-08-19 03:23:12賀永亮
通信電源技術(shù) 2020年10期
關(guān)鍵詞:系統(tǒng)
賀永亮
(中電科儀器儀表(安徽)有限公司,安徽 蚌埠 233010)
0 引 言
隨著“寬帶中國(guó)”戰(zhàn)略的實(shí)施,我國(guó)已經(jīng)成為全球最主要的光纖光纜市場(chǎng)和全球最大的光纖光纜制造國(guó),取得了引人注目的成就[1]。但是,在特殊性能和用途的特種光纖領(lǐng)域,我國(guó)和國(guó)外還有較大的差距。中國(guó)“光纖之父”趙梓森院士認(rèn)為,國(guó)內(nèi)特種光纖產(chǎn)業(yè)面臨的主要問題是核心技術(shù)的缺失,其中一個(gè)很重要的因素就是尚未有國(guó)產(chǎn)化的成熟商用特種光纖參數(shù)測(cè)試和專用的熔接處理設(shè)備。因此,快速突破特種光纖熔接處理系統(tǒng)的關(guān)鍵共性技術(shù),形成具有自主知識(shí)產(chǎn)權(quán)的國(guó)產(chǎn)化產(chǎn)品,滿足我國(guó)特種光纖研制及應(yīng)用過程中的熔接處理需求,具有很高的戰(zhàn)略性和急迫性。傳統(tǒng)的光纖熔接機(jī)大都采用步進(jìn)電機(jī)對(duì)光纖進(jìn)行推進(jìn),優(yōu)點(diǎn)是控制簡(jiǎn)單,缺點(diǎn)是推進(jìn)速度較慢。尤其是當(dāng)分辨率提高時(shí),需要選用大減速比的步進(jìn)電機(jī)。
1 推進(jìn)系統(tǒng)原理分析
本設(shè)計(jì)采用無刷電機(jī)直接驅(qū)動(dòng)方式,原理如圖1所示。選用雙軸無刷電機(jī),一端驅(qū)動(dòng)直線滑軌,另一端驅(qū)動(dòng)正弦編碼器。直線滑軌和編碼器都在電機(jī)的軸上,具有堅(jiān)固、緊密、速度快以及沒有回程差等優(yōu)點(diǎn)。在高分辨率系統(tǒng)中,長(zhǎng)壽命、低磨損很重要,無刷直流電機(jī)滿足此要求[2]。
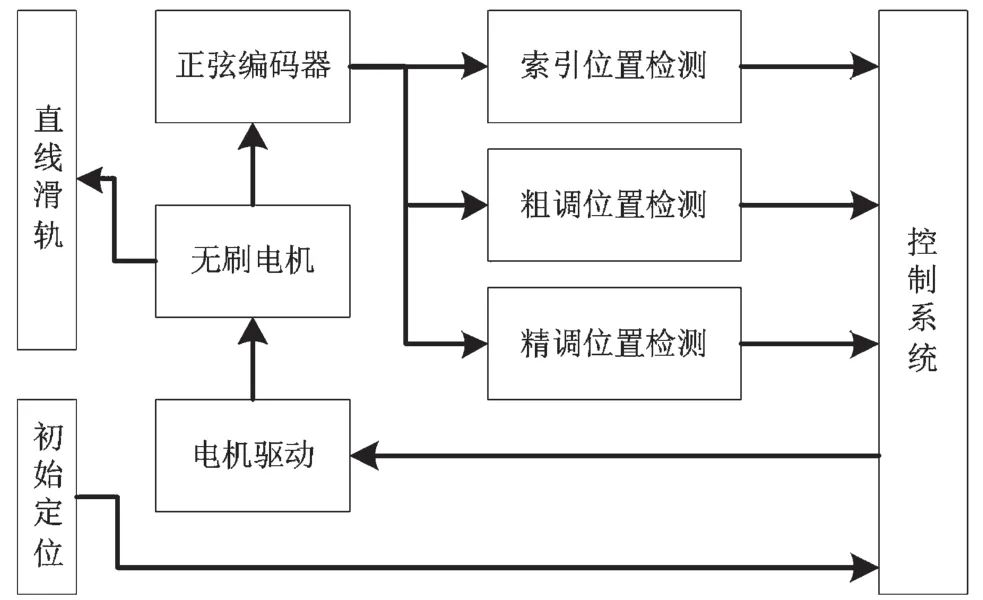
圖1 推進(jìn)系統(tǒng)原理框圖
根據(jù)系統(tǒng)需求,選用1024線的正弦編碼器。編碼器有3路輸出信號(hào)A、B、I,其中A、B是相位相差90°的正弦波,I是索引信號(hào),即編碼器旋轉(zhuǎn)一周會(huì)輸出一個(gè)索引信號(hào)。AB經(jīng)過過零比較器,可提供粗略位置信息。將AB進(jìn)行插值,可獲得一個(gè)正弦波周期內(nèi)的精調(diào)位置信息。控制系統(tǒng)根據(jù)獲得的位置信息,通過驅(qū)動(dòng)電路驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng)。正弦編碼器與電機(jī)同軸,不存在回程差。但是,直線滑軌與無刷電機(jī)通過絲杠傳動(dòng),它們之間存在回程差。這可通過初始定位裝置確定直線滑軌的初始位置,然后往一個(gè)方向推動(dòng)滑軌,即可消除這種回程差。
2 推進(jìn)系統(tǒng)設(shè)計(jì)
2.1 無刷電機(jī)驅(qū)動(dòng)
運(yùn)動(dòng)的物體具有慣性,高速系統(tǒng)中必須考慮慣性的影響。為了縮短熔接時(shí)間,直線滑軌必須高速運(yùn)動(dòng)。當(dāng)距離目標(biāo)位置較近時(shí),需通過減速消除慣性的影響。一般情況下,無刷電機(jī)的調(diào)速大都通過改變PWM波形的占空比來實(shí)現(xiàn)[3]。特種光纖熔接機(jī)需要左右兩路推進(jìn),兩部分推進(jìn)原理相同。無刷電機(jī)驅(qū)動(dòng)原理,如圖2所示。選用雙全橋驅(qū)動(dòng)器L298作為無刷電機(jī)的驅(qū)動(dòng)芯片,每一路有3個(gè)輸入IN1、IN2、EN。控制系統(tǒng)發(fā)出的PWM信號(hào)直接輸入到IN1,同時(shí)經(jīng)過反相器的PWM信號(hào)輸入到IN2。為了保證電機(jī)可靠的啟停,系統(tǒng)還需要控制EN。同時(shí),考慮到電機(jī)換向及啟停時(shí)對(duì)電路的影響以及運(yùn)行中可能產(chǎn)生的抖動(dòng),還需考慮保護(hù)電路的設(shè)計(jì)。
2.2 電機(jī)位置檢測(cè)
正弦編碼器用于檢測(cè)電機(jī)的位置,由碼盤和底座組成。底座包含激光源和檢測(cè)電路。系統(tǒng)中底座固定不動(dòng),碼盤隨電機(jī)轉(zhuǎn)動(dòng),碼盤上的狹縫與底座狹縫相對(duì)運(yùn)動(dòng)。底座檢測(cè)電路會(huì)輸出相位差為90°的正弦波。為了檢測(cè)電機(jī)的絕對(duì)位置,碼盤上還有一個(gè)索引孔。此索引孔確定的絕對(duì)位置可以精確到一個(gè)增量步距[4]。編碼器輸出的正余弦信號(hào)輸入到過零比較器后,輸出兩路相位差為90°的方波。對(duì)這兩路方波進(jìn)行計(jì)數(shù),分辨率可達(dá)到編碼器分辨率的4倍。對(duì)于1024線的編碼器,分辨率可達(dá)4 096。同時(shí),將正弦信號(hào)輸入到一個(gè)8位分辨率的AD,通過對(duì)電壓的比對(duì),可將一個(gè)周期的正弦波細(xì)分為1/256倍。因此,電機(jī)轉(zhuǎn)動(dòng)的角分辨率約為0.000 4°,完全滿足特種光纖熔接機(jī)對(duì)推進(jìn)系統(tǒng)0.001°分辨率的要求。
2.3 推進(jìn)系統(tǒng)的軟件實(shí)現(xiàn)
控制系統(tǒng)選用ARM Cortex嵌入式處理器,采用C語言編程。系統(tǒng)初始化階段,先進(jìn)行硬件狀態(tài)的自檢。如果直線滑軌未在初始位置,則電機(jī)反轉(zhuǎn),否則電機(jī)正轉(zhuǎn)。此時(shí)檢測(cè)正弦編碼器輸出的位置信息,則可檢測(cè)電機(jī)編碼器是否正常工作,然后將直線滑軌反向驅(qū)動(dòng)到初始位置,再正向前進(jìn)特定的距離以消除回差,至此系統(tǒng)初始化完成。
當(dāng)用戶在直線滑軌上放入光纖后,控制系統(tǒng)自動(dòng)計(jì)算光纖需要推進(jìn)的距離,再根據(jù)距離計(jì)算PWM的占空比,使能驅(qū)動(dòng)器,推動(dòng)直線滑軌前進(jìn)。同時(shí),根據(jù)正弦編碼器反饋的位置信息(A、B、I)調(diào)整光纖需要推進(jìn)的距離,進(jìn)而再改變PWM的占空比,直至光纖推進(jìn)到合適的位置。在這個(gè)過程中,檢測(cè)、運(yùn)算、控制都是實(shí)時(shí)進(jìn)行的。雖然現(xiàn)在單片機(jī)的性能與以前相比有很大提升,但在三角函數(shù)的運(yùn)算方面還存在欠缺。因此,在進(jìn)行軟件設(shè)計(jì)時(shí),精調(diào)位置的計(jì)算需進(jìn)行特別處理。一種簡(jiǎn)單的處理方法就是遵循軟件設(shè)計(jì)中的“時(shí)空原則”,即以時(shí)間換空間和以空間換時(shí)間。
3 推進(jìn)系統(tǒng)性能測(cè)試
推進(jìn)精度是推進(jìn)系統(tǒng)最重要的性能指標(biāo)。特種光纖的包層直徑覆蓋80 μm、500 μm。在進(jìn)行推進(jìn)精度測(cè)試時(shí),選擇包層直徑125 μm的光纖進(jìn)行測(cè)試。為了測(cè)試推進(jìn)精度,需要搭建測(cè)試平臺(tái)。測(cè)試平臺(tái)主要包括高放大倍數(shù)的光纖攝像頭和PC機(jī)。攝像頭對(duì)待測(cè)光纖進(jìn)行成像,并實(shí)時(shí)傳輸?shù)絇C機(jī)。光纖推進(jìn)的距離可以通過軟件進(jìn)行測(cè)算。每一次測(cè)試前均將直線滑軌推進(jìn)到初始位置,然后往前推進(jìn)固定的距離,在與軟件測(cè)算的距離進(jìn)行對(duì)比,即可獲得推進(jìn)精度。在整個(gè)推進(jìn)范圍內(nèi),選取多個(gè)測(cè)試點(diǎn)進(jìn)行測(cè)試,具體的測(cè)試數(shù)據(jù)如表1所示。
從表1可以看出,在各個(gè)測(cè)試點(diǎn),推進(jìn)精度均優(yōu)于0.1 μm。

圖2 無刷電機(jī)驅(qū)動(dòng)原理圖
還可利用自動(dòng)測(cè)試技術(shù),對(duì)整個(gè)測(cè)試范圍進(jìn)行逐點(diǎn)掃描測(cè)試。推進(jìn)系統(tǒng)和光纖攝像頭通過串行接口接入到PC機(jī),PC機(jī)控制推進(jìn)系統(tǒng)前進(jìn)一定的步數(shù),再通過光纖圖像識(shí)別光纖實(shí)際前進(jìn)的步數(shù),記錄二者的差值并繪制推進(jìn)精度曲線,如圖3所示。從圖3可以看出,在整個(gè)測(cè)試范圍,推進(jìn)精度指標(biāo)都滿足要求。
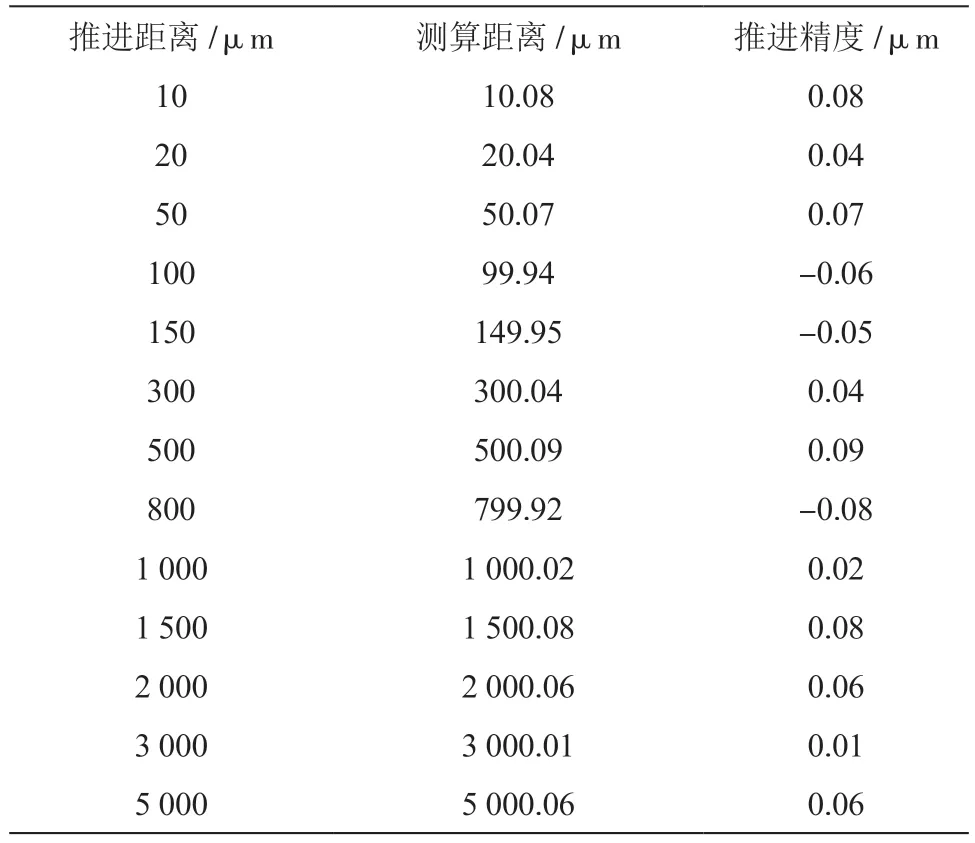
表1 推進(jìn)精度測(cè)試數(shù)據(jù)
4 結(jié) 論
在特種光纖生產(chǎn)與應(yīng)用過程中,需要使用熔接處理設(shè)備。此設(shè)備涉及光、機(jī)、電以及系統(tǒng)集成等交叉領(lǐng)域技術(shù),研制難度大。此類產(chǎn)品一直被國(guó)外廠家壟斷,價(jià)格居高不下。高速推進(jìn)系統(tǒng)設(shè)計(jì)是特種光纖熔接設(shè)備的關(guān)鍵技術(shù)之一,而此項(xiàng)關(guān)鍵技術(shù)的兩個(gè)核心點(diǎn)是高速和高精度。文章提出了一種新的直接驅(qū)動(dòng)輔以編碼器位置檢測(cè)的技術(shù),從測(cè)試數(shù)據(jù)來看可以滿足系統(tǒng)要求。需要注意,本方法涉及多領(lǐng)域技術(shù),熔接處理設(shè)備的應(yīng)用環(huán)境也較為復(fù)雜,因此它的長(zhǎng)期可靠性還需進(jìn)一步驗(yàn)證。

圖3 逐點(diǎn)掃描測(cè)試結(jié)果
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32