操作系統的CPU虛擬化
2020-08-10 08:51:23譚清寬
計算機與網絡 2020年6期
關鍵詞:進程
譚清寬
對CPU虛擬化的目的之一就是能夠同時運行多個進程,實質就是對進程的切換,也就是快速的切換執行多個進程,這樣對于用戶而言,所有的進程都是同時進行的,但是應該如何讓多個進程公平合理并安全高效的運行呢?所以,就出現了很多進程調度算法。
第一個就是最簡單的先進先出(FIFO),也可以叫做先到先服務。這個算法的最大優點就是簡單。沒錯,就是我們理解的哪個進程先來了,CPU就先處理哪個,等當前的處理結束,再處理下一個。
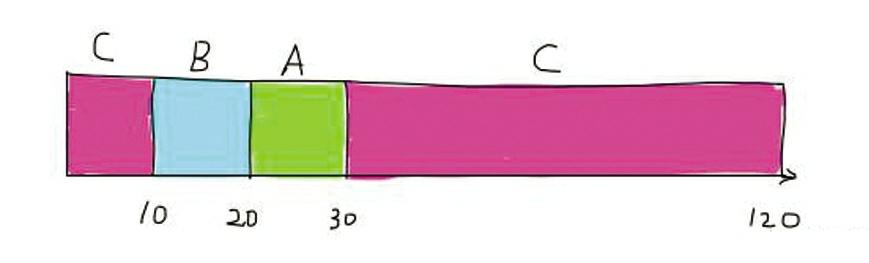
假設有3個進程,每1個進程處理需要10 s,這時,無論哪個進程先來,最后一個進程的完成時間都是30s,也就是說這種情況下最大完成時間是所有進程需要時間之和。但是如果同樣有3個進程,其中2個進程需要10s,另外1個進程需要100 s,這種情況,最大完成時間就是120 s,由于3個進程的各自完成時間不同,所以根據他們到達的順序不同最終的影響也有很大差異。假設3個進程A(10s)、B(10s)、C(100s),如果按照A、B、C的順序到達,那么執行的過和我們預想的是一樣的,開始10 s,A執行結束,20 s后,B執行結束,120 s,C執行結束。但是如果是按照相反的順序到達的呢?C、B、A,這樣開始100 s后,C執行結束,110s,B執行結束,120 s后,A執行結束。很顯然,這種情況下,B和A都要等待時間最長的C結束才可以執行,所以這個算法的效率根據到達的順序有很大關系。顯然,這并不是我們想要的。
在這里我們計算一下進程的平均周轉時間,當3個進程都需要10s的時候平均周轉時間:(10+20+30)/3=20,因為A在第10s完成,B在第20s完成,C在第30 s完成。大家想一下當進程A、B、C時間分別為10 s,10 s,100 s呢?此時進程的順序是C、B、A,那么平均周轉時間就是:(100+110+120)/3=110。這是我們不能接受的。這個問題通常被稱為護航效應(convoy effect)。這種情況在我們生活中也是非常常見的,例如我們去一個地方辦一件事,大多數人只需要1min就可以辦完,但是前面有一個人需要30min分鐘才可以辦完,那么后面的人都要一起等待這30min。
針對上面的問題,我們有新的解決方案:最短任務優先(SJF)與最短完成時間優先(STCF)。
最短任務優先顧名思義,就是需要占用CPU時間短的進程先執行,也就是在上面的例子中(A需要10 s、B需要20 s、C需要100s),先讓A和B先到達,執行結束后在執行C。但是這種算法中,我們依然不能保證C一定最后到達,如果C依然是最先到達,情況依然糟糕。
為了解決這個問題,我們放寬條件,就是我們不需要保證所有的進程必須一次都執行完。現在我們假設最壞的情況,C先到達,之后才是A和B。當C總執行時間需要100 s時,剛開始執行到了10 s的時候,B到達,此時我們不需要保證C執行全部完成,發現B的時間只需要10 s就可以結束,此時就暫停C同時開始執行B,當B執行結束后,A又到達,此時我們同樣不執行C而是執行A,當A結束后,我們再回到C,這樣性能又上升了一個臺階。
上面的算法中主要考量的是平均周轉時間,但是現實中如果用這樣的算法依然是不可靠的,試想我們打開一個軟件,某一個功能需要等待100s后才反應,那我們豈不是要瘋掉?此時新的度量指標出現了:響應時間(響應時間=首次運行-到達時間)。
我們再介紹新的算法,輪轉(Round-Robin,RR)。顧名思義,就是輪訓執行進程。在一個時間片內運行一個工作,然后切換到運行隊列中的下一個任務。重復執行,直到所有結束。這里我們有一點需要注意,就是時間片需要是時鐘中斷周期的倍數。假如時鐘中斷周期是10ms,那么時間片可以是10ms,20ms,30ms,10ms的任何倍數。3個進程A,B,C,所需時間都是5,如果使用RR這種算法,執行過程就是如下圖:
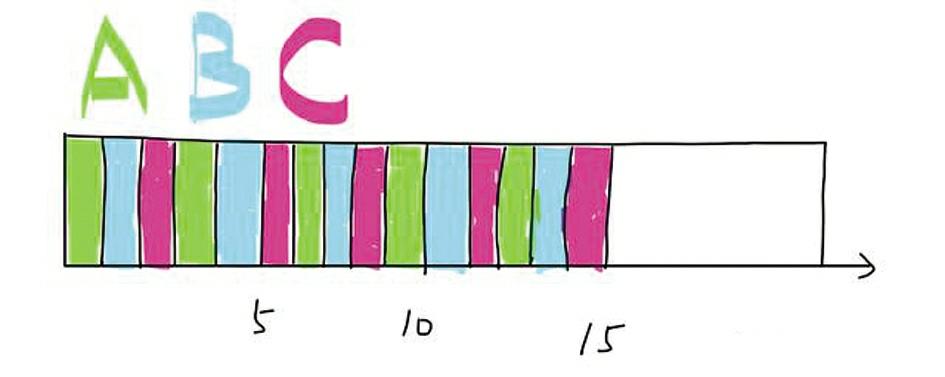
但是這種算法還要付出另外的代價,就是上下文切換的成本。所以說需要找一個合理的時間片。但是最主要的問題是,這種算法與之前的最短任務優先與最短完成時間優先是有些相反的,也就是說,這種算法導致了周轉時間變得更長。
其實2種算法,各自的度量標準不同,一個是周轉時間,另一個是響應時間,畢竟魚與熊掌不可兼得的道理大家都知道。
猜你喜歡
中國外匯(2019年20期)2019-11-25 09:54:58
中國外匯(2019年8期)2019-07-13 06:01:06
電腦愛好者(2018年15期)2018-08-23 17:24:06
民主與科學(2014年3期)2014-02-28 11:23:03
教育與職業(2014年7期)2014-01-21 02:35:04
計算機與網絡(2013年1期)2013-06-05 05:31:50
電腦迷(2012年24期)2012-04-29 00:44:03
中華女子學院學報(2012年6期)2012-03-25 13:52:27
俄羅斯問題研究(2012年1期)2012-03-25 09:54:45
杭州師范大學學報(社會科學版)(2011年3期)2011-04-04 08:58:20
