三自由度并聯(lián)打磨機(jī)器人設(shè)計(jì)與仿真
2020-08-10 08:45:03何金哲孔繁強(qiáng)劉慶友張游周恒驥
中國(guó)新技術(shù)新產(chǎn)品 2020年10期
何金哲 孔繁強(qiáng) 劉慶友 張游 周恒驥


摘? 要:該文根據(jù)空間三自由度并聯(lián)機(jī)構(gòu)結(jié)構(gòu)穩(wěn)定、逆解易得的特性,設(shè)計(jì)了一種空間三自由度的并聯(lián)打磨機(jī)器人。建立了機(jī)構(gòu)運(yùn)動(dòng)方程,得到了動(dòng)平臺(tái)姿態(tài)與3條支鏈變形量的關(guān)系。基于Adams軟件對(duì)建立的三維模型進(jìn)行仿真,并通過(guò)樣機(jī)模擬得到機(jī)構(gòu)的工作參數(shù)。仿真和試驗(yàn)結(jié)果表明,這種打磨機(jī)器人能夠完成空間曲面的打磨,該機(jī)構(gòu)結(jié)構(gòu)簡(jiǎn)單,控制方便,具有廣泛的應(yīng)用價(jià)值。
關(guān)鍵詞:打磨機(jī)器人;空間三自由度并聯(lián)機(jī)構(gòu);運(yùn)動(dòng)學(xué)逆解;Adams仿真
中圖分類(lèi)號(hào):TP242.2? ? ? ? ? 文獻(xiàn)標(biāo)志碼:A
0 引言
并聯(lián)機(jī)構(gòu)具有串聯(lián)機(jī)構(gòu)不可比擬的獨(dú)特優(yōu)勢(shì),如承載能力強(qiáng)、誤差小、自重負(fù)荷比小、動(dòng)力性能好、控制容易等結(jié)構(gòu)特性,并聯(lián)機(jī)器結(jié)構(gòu)可以大幅減少其零件數(shù)以及減少制造成本和庫(kù)存成本,同時(shí)更加容易組裝和模塊化。除此以外,并聯(lián)機(jī)構(gòu)具有運(yùn)動(dòng)學(xué)逆解求取容易的特性,很好地滿(mǎn)足了打磨任務(wù)的要求。基于以上優(yōu)點(diǎn),該文采用并聯(lián)機(jī)構(gòu)實(shí)現(xiàn)空間曲面的軌跡運(yùn)動(dòng)。
傳統(tǒng)打磨機(jī)構(gòu)主要針對(duì)XY平面維度上的應(yīng)用,而空間曲面的打磨要求打磨機(jī)構(gòu)在三維空間曲面內(nèi)的靈活自如地運(yùn)動(dòng)(Z軸以及繞坐標(biāo)軸的α和β方向的運(yùn)動(dòng)(平動(dòng)、轉(zhuǎn)動(dòng)))。1985年克拉維爾設(shè)計(jì)的Delta型并聯(lián)機(jī)構(gòu)[1]經(jīng)過(guò)幾十年的發(fā)展得到了廣泛應(yīng)用,經(jīng)過(guò)分析發(fā)現(xiàn)Delta型并聯(lián)機(jī)構(gòu)很好地實(shí)現(xiàn)了三維空間的平動(dòng),但由于其動(dòng)平臺(tái)的姿態(tài)始終不變,因此無(wú)法滿(mǎn)足需要。1965年,德國(guó)Stewart[2]發(fā)明了六自由度并聯(lián)機(jī)構(gòu),通過(guò)6個(gè)獨(dú)立液壓缸實(shí)現(xiàn)機(jī)構(gòu)六自由度運(yùn)動(dòng),可以很好地滿(mǎn)足需求,但因?yàn)闄C(jī)構(gòu)自由度的增加導(dǎo)致求解過(guò)程非常復(fù)雜,所以增加了控制的難度且大大增加了生產(chǎn)的成本。3-RRR球面并聯(lián)機(jī)構(gòu)可以實(shí)現(xiàn)球面三自由度,且該類(lèi)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)正反解都很簡(jiǎn)單,是一種應(yīng)用很廣泛的三維移動(dòng)空間機(jī)構(gòu),Alige Eye[3-4]作為三自由度并聯(lián)機(jī)器人中的一種,理論上的工作空間為完整球面,但經(jīng)過(guò)驗(yàn)證發(fā)現(xiàn),實(shí)物加工困難且對(duì)精度要求高,容易出現(xiàn)各類(lèi)碰撞干涉。此外,打磨也需要機(jī)構(gòu)具有良好的承載能力和穩(wěn)定性,而Alige Eye獨(dú)特的結(jié)構(gòu)很難滿(mǎn)足這一定要求。根據(jù)人類(lèi)踝關(guān)節(jié)的運(yùn)動(dòng)特征可知,踝關(guān)節(jié)具有3個(gè)轉(zhuǎn)動(dòng)自由度,具有高度的靈活性和穩(wěn)定性[5],對(duì)此該文結(jié)合并聯(lián)式踝關(guān)節(jié)機(jī)構(gòu)和3-RSS/S并聯(lián)機(jī)構(gòu)的特點(diǎn),提出了一種空間三自由度并聯(lián)打磨機(jī)器人機(jī)構(gòu),分析打磨機(jī)構(gòu)的運(yùn)動(dòng)方程,通過(guò)仿真和樣機(jī)試驗(yàn)驗(yàn)證了打磨機(jī)構(gòu)能適應(yīng)工件曲面打磨加工的場(chǎng)景。
1 三自由度并聯(lián)打磨機(jī)器人設(shè)計(jì)
1.1 機(jī)構(gòu)描述
該機(jī)構(gòu)由動(dòng)平臺(tái)、靜平臺(tái)、打磨裝置、3條相同的支鏈和一個(gè)約束軸構(gòu)成。其中動(dòng)平臺(tái)(上平臺(tái))與打磨裝置相連,靜平臺(tái)(下平臺(tái))可以通過(guò)快換裝置與機(jī)床或機(jī)械臂末端相連,3對(duì)支鏈從上到下由1個(gè)球頭(球副)、電缸(移動(dòng)副)、十字萬(wàn)向節(jié)(轉(zhuǎn)動(dòng)副)構(gòu)成。支鏈通過(guò)球頭和萬(wàn)向節(jié)分別與動(dòng)平臺(tái)、靜平臺(tái)相連。約束軸和動(dòng)平臺(tái)通過(guò)球頭連接約束動(dòng)平臺(tái)的活動(dòng)范圍,同時(shí)還起到支撐動(dòng)平臺(tái)、高結(jié)構(gòu)穩(wěn)定性的作用,機(jī)械結(jié)構(gòu)如圖1所示。
1.2 機(jī)構(gòu)自由度計(jì)算
三自由度并聯(lián)打磨機(jī)器人采用的是空間三自由度并聯(lián)機(jī)構(gòu),自由度M計(jì)算公式為
(1)
式中:n為機(jī)構(gòu)中的活動(dòng)構(gòu)件數(shù),g為運(yùn)動(dòng)副數(shù),fi為第i個(gè)運(yùn)動(dòng)副的自由度數(shù),該機(jī)構(gòu)的活動(dòng)構(gòu)件數(shù)n=7,運(yùn)動(dòng)副數(shù)g=9,空間機(jī)構(gòu)d=6,其中6個(gè)運(yùn)動(dòng)副的自由度為1(f=1),3個(gè)運(yùn)動(dòng)副的自由度為3(f=3),應(yīng)用公式
M=6×(7-9)+(6×1+3×3)=3 (2)
由自由度計(jì)算公式可知,該三自由度并聯(lián)打磨機(jī)器人有3個(gè)轉(zhuǎn)動(dòng)自由度,滿(mǎn)足空間打磨的需要。
2 機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析
2.1 三自由度并聯(lián)機(jī)器人運(yùn)動(dòng)模型的建立
三自由度并聯(lián)機(jī)器人是通過(guò)3條支鏈將動(dòng)、靜平臺(tái)連接起來(lái)的閉環(huán)機(jī)構(gòu)。在該機(jī)構(gòu)中有3條相同的支鏈,每條支鏈從下到上依次為轉(zhuǎn)動(dòng)副R、虎克鉸u、移動(dòng)副P(pán)、球鉸S。以第4條支鏈為中心支撐桿,使用單一球鉸連接動(dòng)、靜平臺(tái),靜平臺(tái)上3條支鏈的3個(gè)點(diǎn)A1,A2,A3分別位于以靜平臺(tái)中心為圓心,半徑為100 mm的圓上(即支鏈與靜平臺(tái)連接點(diǎn)處),動(dòng)平臺(tái)上3條鏈的3個(gè)點(diǎn)B1,B2,B3分別位于以動(dòng)平臺(tái)中心為圓心,半徑為100 mm的圓上(即支鏈與動(dòng)平臺(tái)的連接點(diǎn)處),動(dòng)平臺(tái)厚度為5 mm,動(dòng)靜平臺(tái)之間的距離為200 mm。具體示意圖如圖2所示。
2.2 三自由度并聯(lián)機(jī)器人位置反解分析
在描述三自由度并聯(lián)機(jī)器人的位姿時(shí),采用的運(yùn)動(dòng)學(xué)研究方法是將三維坐標(biāo)增廣為四維坐標(biāo),將剛體的旋轉(zhuǎn)和平移納入一個(gè)四階方陣中,通過(guò)歐拉旋轉(zhuǎn)方程將平移、旋轉(zhuǎn)與矩陣運(yùn)算聯(lián)系起來(lái)。對(duì)于選定的靜平臺(tái)坐標(biāo)系{A},空間中任意點(diǎn)P的位置可用3×1的列向量表示,即
(3)
式中:PX,PY,PZ分別是點(diǎn)P在坐標(biāo)系{A}中分別沿X,Y,Z方向上的分量。為了描述空間某剛體B的方位,需要在剛體B上建立一直角動(dòng)坐標(biāo)系{B},并將動(dòng)坐標(biāo)系{B}與剛體B固連。用動(dòng)坐標(biāo)系{B}的3個(gè)單位主矢量BX,BY,BZ分別與靜坐標(biāo)系{A}的AX,AY,AZ構(gòu)成的方向余弦矩陣來(lái)表示剛體B在坐標(biāo)系{A}中的位置姿態(tài),即
(4)
式中:表示剛體B相對(duì)于坐標(biāo)系{A}的位置姿態(tài),稱(chēng)為旋轉(zhuǎn)矩陣。旋轉(zhuǎn)變換矩陣一般是通過(guò)繞X軸旋轉(zhuǎn)一個(gè)角度、繞Y軸旋轉(zhuǎn)一個(gè)角度以及繞Z軸旋轉(zhuǎn)一個(gè)角度來(lái)描述的。要完全描述剛體B在靜坐標(biāo)系{A}的位姿,首先要將動(dòng)坐標(biāo)系{B}與剛體B固連。動(dòng)坐標(biāo)系{B}的坐標(biāo)原點(diǎn)定在剛體B的中心點(diǎn)上。由于P點(diǎn)不能移動(dòng),因此(XP,YP,ZP)為(0,0,ZP) (ZP表示動(dòng)平臺(tái)中心到靜平臺(tái)之問(wèn)的距離為定值)。動(dòng)坐標(biāo)系{B}相對(duì)于靜坐標(biāo)系{A}的原點(diǎn)位置和坐標(biāo)軸的方位分別用位置向量和旋轉(zhuǎn)矩陣來(lái)描述,即
空間任意點(diǎn)P在兩坐標(biāo)系{A}和{B}中的位置矢量分別為和 ,則它們之間具有以下變換關(guān)系:
基于前述分析,設(shè)動(dòng)坐標(biāo)系B-XYZ為定坐標(biāo)系A(chǔ)-XYZ沿Z軸平移(0,0,200)后的坐標(biāo)系,繞Z軸轉(zhuǎn)a角,繞Y軸轉(zhuǎn)b角,最后繞X軸轉(zhuǎn)c角,對(duì)于旋轉(zhuǎn)次序,我們作如下規(guī)定
=rot(Z,a)rot(Y,b)rot(X,c)
式中:表示為坐標(biāo)系{B}相對(duì)于坐標(biāo)系{A}的旋轉(zhuǎn)矩陣。
則其歐拉角轉(zhuǎn)換矩陣為
=trans(0,0,200)rot(Z,a)rot(Y,b)rot(X,c)
則其歐拉角轉(zhuǎn)換矩陣為
式中:trans為{B}相對(duì){A}的平移,rot為{B}相對(duì){A}根據(jù)X,Y,Z軸旋轉(zhuǎn)給定的角度
通過(guò)MATLAB編程求解,可以求解出AP ,動(dòng)平臺(tái)上的3點(diǎn)坐標(biāo)分別為B1(B1X,B1Y,B1Z),B2(B2X,B2Y,B2Z),B3(B3X,B3Y,B3Z),其中
靜平臺(tái)上3點(diǎn)的坐標(biāo)分別為:
A1(-50, ,0),A2(-50,-,0),A3(100,0,0)
結(jié)合機(jī)構(gòu)特點(diǎn)與2點(diǎn)之間的距離公式可得,桿長(zhǎng)為L(zhǎng)1=︱A1B1︱,L2=︱A2B2︱,L3=︱A3B3︱。
將所得的A1,A2,A3,B1,B2,B3代入桿長(zhǎng)計(jì)算公式中,初步給定a,b,c的運(yùn)行區(qū)間為[-π/12,12/π],可求得相對(duì)應(yīng)的電動(dòng)推桿桿長(zhǎng)及其變化長(zhǎng)度。
3 Adams仿真驗(yàn)證
該文中設(shè)計(jì)的三自由度并聯(lián)打磨機(jī)器人有3個(gè)相同的對(duì)稱(chēng)支鏈,每個(gè)支鏈上需要安裝一個(gè)驅(qū)動(dòng)電機(jī),考慮到電動(dòng)推桿質(zhì)量較大,且末端執(zhí)行器是輕質(zhì)產(chǎn)品,系統(tǒng)的總動(dòng)能主要分布在電動(dòng)推桿上。因此在動(dòng)力學(xué)建模時(shí)可對(duì)機(jī)器人進(jìn)行簡(jiǎn)化:忽略動(dòng)平臺(tái)和末端執(zhí)行器質(zhì)量以及動(dòng)能。
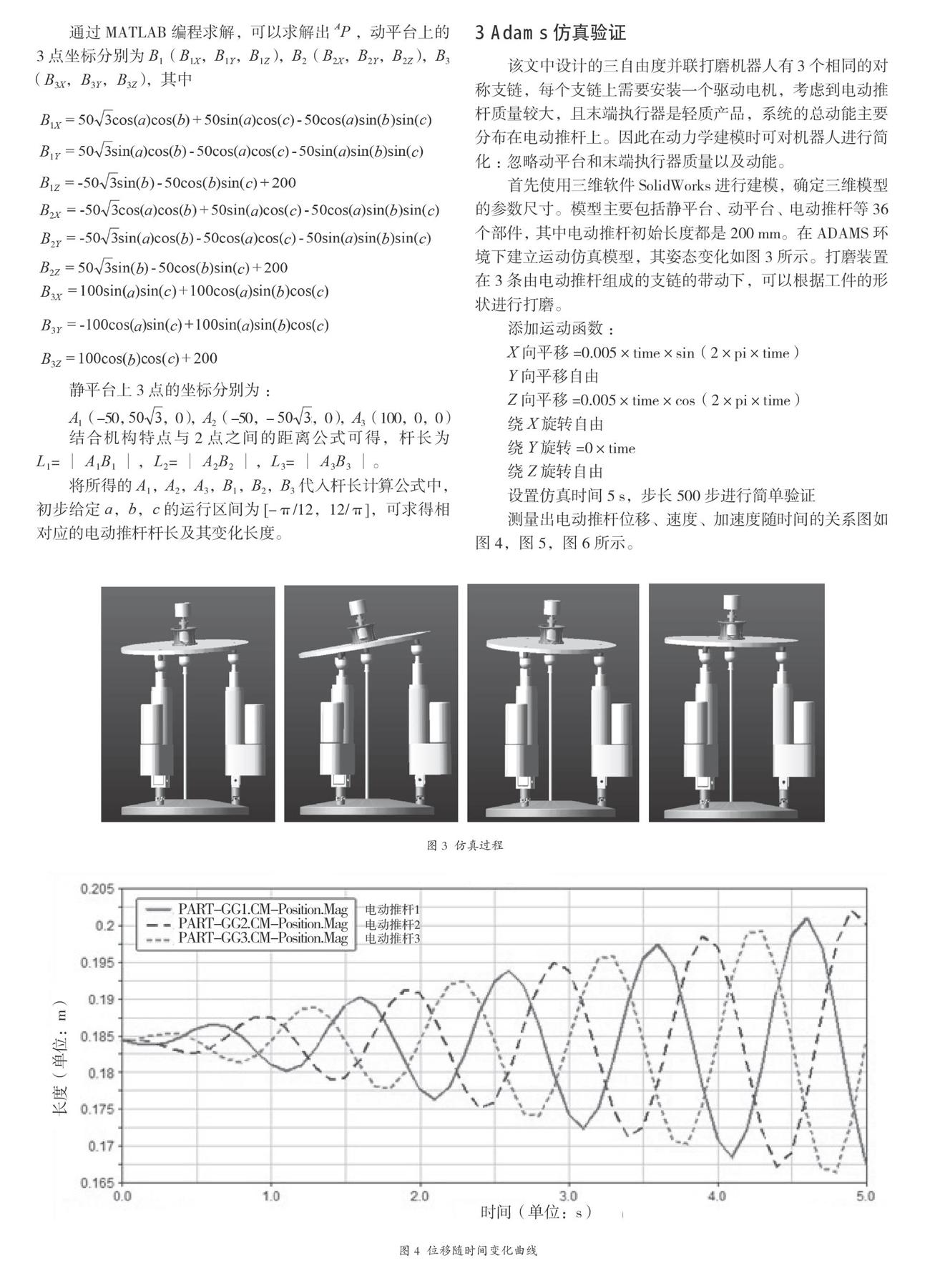
首先使用三維軟件SolidWorks進(jìn)行建模,確定三維模型的參數(shù)尺寸。模型主要包括靜平臺(tái)、動(dòng)平臺(tái)、電動(dòng)推桿等36個(gè)部件,其中電動(dòng)推桿初始長(zhǎng)度都是200 mm。在ADAMS環(huán)境下建立運(yùn)動(dòng)仿真模型,其姿態(tài)變化如圖3所示。打磨裝置在3條由電動(dòng)推桿組成的支鏈的帶動(dòng)下,可以根據(jù)工件的形狀進(jìn)行打磨。
添加運(yùn)動(dòng)函數(shù):
X向平移=0.005×time×sin(2×pi×time)
Y向平移自由
Z向平移=0.005×time×cos(2×pi×time)
繞X旋轉(zhuǎn)自由
繞Y旋轉(zhuǎn)=0×time
繞Z旋轉(zhuǎn)自由
設(shè)置仿真時(shí)間5 s,步長(zhǎng)500步進(jìn)行簡(jiǎn)單驗(yàn)證
測(cè)量出電動(dòng)推桿位移、速度、加速度隨時(shí)間的關(guān)系圖如圖4,圖5,圖6所示。
仿真結(jié)果表明,電動(dòng)推桿速度、加速度曲線連續(xù)且變化平滑,關(guān)鍵位置速度、加速度接近0,滿(mǎn)足軌跡規(guī)劃要求。在仿真過(guò)程中,運(yùn)動(dòng)能夠平穩(wěn)運(yùn)行,具有良好的穩(wěn)定性,適合打磨場(chǎng)景。
4 樣機(jī)及實(shí)驗(yàn)
4.1 樣機(jī)的電路系統(tǒng)
動(dòng)力源選用了12 V的電動(dòng)推桿,并且可以通過(guò)編碼器的反饋精確控制電動(dòng)推桿的伸長(zhǎng)量,電機(jī)驅(qū)動(dòng)選用了L298N的直流電機(jī)驅(qū)動(dòng),可以通過(guò)改變PWM的大小來(lái)改變電機(jī)的轉(zhuǎn)速跟轉(zhuǎn)向,完成對(duì)電機(jī)轉(zhuǎn)角的閉環(huán)控制,姿態(tài)傳感器選用的JY61,可以通過(guò)和主控板的串口通信,得到當(dāng)前機(jī)構(gòu)的滾轉(zhuǎn)角(X軸)、俯仰角(Y軸)、偏航角(Z軸)的反饋值(姿態(tài)角解算時(shí)所使用的坐標(biāo)系為東北天坐標(biāo)系),主控板采用的STM32F407。上位機(jī)跟主控板之間也通過(guò)串口通信,主控板接收上位機(jī)發(fā)出的設(shè)定角度值。另外,機(jī)構(gòu)上端的打磨頭由無(wú)刷電機(jī)帶動(dòng),機(jī)構(gòu)開(kāi)始運(yùn)動(dòng)時(shí),打磨頭開(kāi)始旋轉(zhuǎn),滿(mǎn)足打磨物體的需求。
4.2 控制思路
通過(guò)上位機(jī)向主控板發(fā)送數(shù)據(jù),得到所需角度的設(shè)定值。主控板對(duì)所需角度的設(shè)定值跟當(dāng)前的實(shí)際角度相減,并將相差值等分一定值之后,得到一個(gè)每次角度的累加值,通過(guò)對(duì)三自由度并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)方程的逆解,得到要到達(dá)設(shè)定角度時(shí),每一根推桿應(yīng)該移動(dòng)的距離。主控板與電動(dòng)推桿之間連接有電機(jī)驅(qū)動(dòng)L298N,再通過(guò)電動(dòng)推桿上的編碼器的反饋值構(gòu)成閉環(huán)控制,實(shí)現(xiàn)對(duì)每根推桿桿長(zhǎng)移動(dòng)距離的精確控制。在不斷累加的過(guò)程中,得到的姿態(tài)反饋值會(huì)和設(shè)定值不斷比較,直到兩者差值小于設(shè)定閾值時(shí),表明機(jī)構(gòu)已經(jīng)達(dá)到所需的姿態(tài)。由于機(jī)構(gòu)結(jié)構(gòu)的特性,如果要使機(jī)構(gòu)按預(yù)定的運(yùn)動(dòng)軌跡運(yùn)動(dòng),就需要計(jì)算出所需軌跡上的多個(gè)(盡可能多的)細(xì)分的點(diǎn),使機(jī)構(gòu)按上述流程不斷擬合這些軌跡上的點(diǎn),從而擬合所需軌跡,實(shí)現(xiàn)軌跡運(yùn)動(dòng)。控制流程和原理圖如圖7,圖8所示。
5 結(jié)語(yǔ)
通過(guò)分析空間三自由度并聯(lián)機(jī)器人的結(jié)構(gòu)特性,列出并聯(lián)機(jī)構(gòu)的位置逆解的表達(dá)式,通過(guò)MATLAB軟件的分析計(jì)算,并結(jié)合Adams軟件對(duì)打磨軌跡進(jìn)行仿真,驗(yàn)證了機(jī)構(gòu)的可行性。通過(guò)樣機(jī)搭建,簡(jiǎn)單模擬了打磨場(chǎng)景,可以滿(mǎn)足空間曲面的打磨要求。
小型三自由度打磨機(jī)器人因其優(yōu)越的結(jié)構(gòu)構(gòu)造,使得其具有更好的性?xún)r(jià)比,更適合大批量生產(chǎn),在保證產(chǎn)品精密和高質(zhì)量的同時(shí),也能優(yōu)化生產(chǎn)效率和成本。將小型三自由度打磨機(jī)器人應(yīng)用于拋磨工藝,有助于提高機(jī)械加工的效率,降低生產(chǎn)成本,可以給拋磨業(yè)的發(fā)展提供一定的幫助。
參考文獻(xiàn)
[1]梁香寧,牛志剛.三自由度Delta并聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)分析及工作空間求解[J].太原理工大學(xué)學(xué)報(bào),2008(1):93-96.
[2]Stewart D.A platform with six degree of freedom[J].Proceedings of the Institution of Mechanical Engineers,1965,1(80):371-386.
[3]張林,郭旭俠,史革盟,等.3-RRR球面并聯(lián)機(jī)器人正向運(yùn)動(dòng)學(xué)分析[J].機(jī)械傳動(dòng),2019,43(7):27-34.
[4]王超群,高踔,陳柏,等.3-RRR球面并聯(lián)機(jī)構(gòu)的工作空間分析及結(jié)構(gòu)優(yōu)化[J].機(jī)械設(shè)計(jì)與制造,2015(4):55-58.
[5]韓亞麗,于建銘,宋愛(ài)國(guó),等.并聯(lián)式踝關(guān)節(jié)康復(fù)機(jī)器人研究[J].東南大學(xué)學(xué)報(bào)(自然科學(xué)版),2015(1):45-50.
