面向天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動仿真技術(shù)
2020-08-10 02:37:58李乾治王曉鋒劉淵葉海洋
現(xiàn)代計算機(jī) 2020年17期
關(guān)鍵詞:模型
李乾治,王曉鋒,劉淵,葉海洋
(1.江南大學(xué)物聯(lián)網(wǎng)工程學(xué)院,無錫 214122;2.江南大學(xué)數(shù)字媒體學(xué)院,無錫 214122)
0 引言
隨著航天技術(shù)的發(fā)展,實現(xiàn)全球信息共享,特別是天地網(wǎng)絡(luò)融合的天地一體化信息網(wǎng)絡(luò)引起全球的廣泛關(guān)注[1-3]。空間網(wǎng)絡(luò)覆蓋面廣、組網(wǎng)靈活、不受地理環(huán)境限制,與地面網(wǎng)絡(luò)相互補充,實現(xiàn)天地信息共享是未來一體化網(wǎng)絡(luò)發(fā)展的目標(biāo)。作為具有戰(zhàn)略意義的國家信息基礎(chǔ)設(shè)施,天地一體化信息網(wǎng)絡(luò)對于維護(hù)國家利益、促進(jìn)經(jīng)濟(jì)發(fā)展具有重大意義[4]。
天地一體化信息網(wǎng)絡(luò)由地基節(jié)點網(wǎng)、地面互聯(lián)網(wǎng)、天基骨干網(wǎng)、天基接入網(wǎng)、、移動通信網(wǎng)等多種異構(gòu)網(wǎng)絡(luò)互聯(lián)融合而成,其網(wǎng)絡(luò)規(guī)模龐大、結(jié)構(gòu)復(fù)雜、高度動態(tài),技術(shù)體制多樣,解決大量技術(shù)難點耗時耗資巨大,因此,需要建立天地一體化信息網(wǎng)絡(luò)仿真實驗平臺,對各類新技術(shù)與安全防御策略進(jìn)行試驗驗證[5-6]。伴隨著云計算、虛擬化、SDN等的技術(shù)發(fā)展,基于虛擬化的網(wǎng)絡(luò)仿真技術(shù)成為當(dāng)前的主流[7-8]。基于虛擬化技術(shù)的天地一體化信息網(wǎng)絡(luò)仿真也得到了一定的研究[9-12],可構(gòu)建具有天地一體化衛(wèi)星鏈路特性的仿真網(wǎng)絡(luò)。
有別于傳統(tǒng)網(wǎng)絡(luò),天地一體化信息網(wǎng)絡(luò)的顯著特征是高度動態(tài)變化[4],包括衛(wèi)星軌道與姿態(tài)等實時變化等。文獻(xiàn)[9-12]通過衛(wèi)星鏈路特性參數(shù)事先計算與設(shè)置,可實現(xiàn)衛(wèi)星鏈路特性的仿真,但難以應(yīng)對天地一體化信息網(wǎng)絡(luò)的動態(tài)變化。
針對上述問題,本文基于OpenStack云平臺[13]與衛(wèi)星工具包 STK(Satellite Tool Kit)[14],提出了一種面向天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動仿真方法。該方法使用衛(wèi)星工具包STK構(gòu)建基于理論計算的衛(wèi)星模型網(wǎng)絡(luò),使用OpenStack構(gòu)建基于云平臺的衛(wèi)星仿真網(wǎng)絡(luò),并研究了衛(wèi)星模型網(wǎng)絡(luò)與衛(wèi)星仿真網(wǎng)絡(luò)的動態(tài)聯(lián)動技術(shù)。動態(tài)聯(lián)動技術(shù)綜合了STK的衛(wèi)星理論模型實時精確計算優(yōu)勢與OpenStack云平臺(融合了虛擬化技術(shù)與SDN技術(shù))的衛(wèi)星鏈路仿真的高吞吐量與靈活切換優(yōu)勢。一方面,通過衛(wèi)星模型網(wǎng)絡(luò)實時精確測算各種衛(wèi)星鏈路的特性參數(shù),并將上述參數(shù)實時加載到衛(wèi)星仿真網(wǎng)絡(luò)中,可實時仿真出具有衛(wèi)星鏈路動態(tài)特性的天地一體化網(wǎng)絡(luò);另一方面,當(dāng)天地一體化信息網(wǎng)絡(luò)出現(xiàn)動態(tài)變化時(例如衛(wèi)星軌道與姿態(tài)調(diào)整等),衛(wèi)星仿真網(wǎng)絡(luò)可將動態(tài)變化加載到衛(wèi)星模型網(wǎng)絡(luò)中,觸發(fā)其進(jìn)一步實時計算并將動態(tài)結(jié)果傳導(dǎo)到衛(wèi)星仿真網(wǎng)絡(luò)中,從而實現(xiàn)了天地一體化信息網(wǎng)絡(luò)的動態(tài)變化仿真。
1 相關(guān)工作
天地一體化信息網(wǎng)絡(luò)仿真與模擬的相關(guān)研究主要集中于面向衛(wèi)星網(wǎng)絡(luò)的數(shù)學(xué)模型、基于離散事件模擬的衛(wèi)星網(wǎng)絡(luò)數(shù)字仿真以及基于虛擬化的衛(wèi)星網(wǎng)絡(luò)仿真3個方面:
(1)面向衛(wèi)星網(wǎng)絡(luò)的數(shù)學(xué)模型
STK[14]是進(jìn)行衛(wèi)星各種性能分析的軟件包,在衛(wèi)星網(wǎng)絡(luò)建模和分析方面具有優(yōu)勢,可用于新理論模型的驗證[15],航天器三維模型動畫演示[16],衛(wèi)星覆蓋測算[17],以及衛(wèi)星軌道機(jī)動結(jié)果評估[18],但STK僅僅計算理論參數(shù),并不能仿真實際協(xié)議與業(yè)務(wù)流量。
(2)基于離散事件模擬的衛(wèi)星網(wǎng)絡(luò)數(shù)字仿真
基于離散事件模擬(Discrete Event Simulation)技術(shù)的數(shù)字仿真被廣泛應(yīng)用于新型衛(wèi)星網(wǎng)絡(luò)技術(shù)評測與驗證中。文獻(xiàn)[19]基于NS2模擬了衛(wèi)星鏈路,并用于Abis接口的性能評估;文獻(xiàn)[20]基于OPNET模擬了MPLS衛(wèi)星網(wǎng)絡(luò),并用于評測服務(wù)質(zhì)量;文獻(xiàn)[21]對天地一體化信息網(wǎng)絡(luò)中的“星-地”鏈路進(jìn)行了建模,并基于OMNeT++軟件進(jìn)行了特性仿真;文獻(xiàn)[22]基于離散事件模擬技術(shù)仿真了“星-地”混合網(wǎng)絡(luò),并用于分析吞吐量、延遲與誤碼率等方面的性能。基于離散事件模擬的衛(wèi)星網(wǎng)絡(luò)數(shù)字仿真,可以構(gòu)建復(fù)雜的衛(wèi)星網(wǎng)絡(luò)場景,并分析復(fù)雜網(wǎng)絡(luò)的性能,且具有成本低、可擴(kuò)展性高的優(yōu)點,但數(shù)字仿真并不具備加載真實業(yè)務(wù)系統(tǒng)與流量的能力,在仿真逼真性上具有一定的局限性。
(3)基于虛擬化的衛(wèi)星網(wǎng)絡(luò)仿真
基于虛擬化、SDN等技術(shù),可保證業(yè)務(wù)系統(tǒng)與流量的逼真性,并具有仿真規(guī)模的可擴(kuò)展、仿真網(wǎng)絡(luò)可靈活構(gòu)建等優(yōu)勢,因此成為了天地一體化信息網(wǎng)絡(luò)的主流技術(shù)。
文獻(xiàn)[11]基于云計算平臺設(shè)計并實現(xiàn)了面向延時容忍網(wǎng)絡(luò)(Delay Tolerant Networks,DTN)的仿真平臺EmuStack,通過使用輕量級虛擬化技術(shù)提升了仿真規(guī)模,使用流量控制工具 TC(Traffic Control)對“星-地”鏈路的延時、通斷及丟包率進(jìn)行了仿真;文獻(xiàn)[8]基于網(wǎng)絡(luò)功能虛擬化的思想,借助于KVM全虛擬化技術(shù)與SDN技術(shù),設(shè)計了虛擬路由器、虛擬交換機(jī)、虛擬鏈路等組件,并通過研究符合衛(wèi)星網(wǎng)絡(luò)、DTN網(wǎng)絡(luò)特性參數(shù)的處理組件,實現(xiàn)了對傳統(tǒng)互聯(lián)網(wǎng)、DTN網(wǎng)絡(luò)、衛(wèi)星鏈路的仿真;文獻(xiàn)[9-10]基于云計算平臺設(shè)計并實現(xiàn)了天地一體化衛(wèi)星網(wǎng)絡(luò)仿真場景,并重點研究了面向衛(wèi)星鏈路性能特性(如帶寬、延遲及誤碼率等)的仿真技術(shù);文獻(xiàn)[12]設(shè)計并實現(xiàn)了一種DTN網(wǎng)絡(luò)的測試平臺TUNIE,利用虛擬化技術(shù)與SDN技術(shù)來仿真DTN環(huán)境,通過控制數(shù)據(jù)傳輸來實現(xiàn)衛(wèi)星鏈路時變比特率、誤碼率以及傳輸延遲的仿真。
文獻(xiàn)[8-12]的工作重點是基于虛擬化實現(xiàn)衛(wèi)星鏈路性能特性的仿真,但所提的仿真方法僅僅是預(yù)先設(shè)置了仿真場景,并通過STK等工具對衛(wèi)星鏈路特性參數(shù)事先計算與靜態(tài)設(shè)置[9-11],因此,不能滿足天地一體化信息網(wǎng)絡(luò)的高度動態(tài)變化的仿真需求。
2 面向天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動仿真架構(gòu)
2.1 動態(tài)聯(lián)動仿真設(shè)計思路
STK的衛(wèi)星網(wǎng)絡(luò)計算模型能夠有效刻畫網(wǎng)絡(luò)拓?fù)洹㈡溌诽匦缘葎討B(tài)特性及衛(wèi)星在軌運行、軌道機(jī)動、姿態(tài)變更等場景,可以準(zhǔn)確分析復(fù)雜網(wǎng)絡(luò)的性能和行為,且具有成本低、管理簡單、可擴(kuò)展性高的優(yōu)點,但并不能仿真實際協(xié)議與業(yè)務(wù)流量。云平臺OpenStack融合了虛擬化、SDN等技術(shù),基于OpenStack的網(wǎng)絡(luò)仿真,不僅能夠運行真實業(yè)務(wù)流量,而且仿真結(jié)果具有較高逼真度和可擴(kuò)展性,但OpenStack缺乏相關(guān)的衛(wèi)星網(wǎng)絡(luò)計算模型支持。為此,有必要綜合STK與云平臺兩者的優(yōu)勢,研究兩者融合的天地一體化信息網(wǎng)絡(luò)仿真方法。
考慮到天地一體化信息網(wǎng)絡(luò)的高度動態(tài)變化,如何無縫融合STK與云平臺,實現(xiàn)衛(wèi)星軌道機(jī)動、衛(wèi)星姿態(tài)變化等場景的實時仿真是關(guān)鍵。為此本文提出了面向天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動仿真方法,其基本思路如圖1所示。

圖1 動態(tài)聯(lián)動仿真設(shè)計思路
如圖1所示,動態(tài)聯(lián)動仿真設(shè)計思路是實現(xiàn)衛(wèi)星模型網(wǎng)絡(luò)與衛(wèi)星仿真網(wǎng)絡(luò)的動態(tài)聯(lián)動。衛(wèi)星模型網(wǎng)絡(luò)由STK生成,包含了組成天地一體化信息網(wǎng)絡(luò)的各種要素,如天基骨干衛(wèi)星、低軌衛(wèi)星星座、各種航天器等,STK融合了衛(wèi)星軌道模型、大氣吸收模型、雨衰模型及衛(wèi)星通信信道模型等,可對天地一體化信息網(wǎng)絡(luò)的衛(wèi)星軌道要素、衛(wèi)星接收機(jī)天線、發(fā)射機(jī)天線參數(shù)及衛(wèi)星通信品質(zhì)等參數(shù)進(jìn)行動態(tài)計算。衛(wèi)星仿真網(wǎng)絡(luò)由云平臺OpenStack生成,主要是基于全虛擬化技術(shù)與輕量級虛擬化技術(shù),構(gòu)建天基骨干衛(wèi)星、低軌衛(wèi)星星座、各種航天器等虛擬化仿真單元,并基于SDN技術(shù),構(gòu)建虛擬化仿真單元間的基礎(chǔ)連接關(guān)系,形成了與衛(wèi)星模型網(wǎng)絡(luò)對應(yīng)的衛(wèi)星仿真網(wǎng)絡(luò)。衛(wèi)星模型網(wǎng)絡(luò)主要是用途是進(jìn)行天地一體化信息網(wǎng)絡(luò)中各種參數(shù)的動態(tài)計算,衛(wèi)星仿真網(wǎng)絡(luò)是天地一體化信息網(wǎng)絡(luò)的具體復(fù)現(xiàn),是真正展開天地一體化信息網(wǎng)絡(luò)新技術(shù)驗證的環(huán)境。
衛(wèi)星網(wǎng)絡(luò)特征參數(shù)處理與描述主要將衛(wèi)星模型網(wǎng)絡(luò)中的星間可見性、衛(wèi)星鏈路長度、衛(wèi)星鏈路通信品質(zhì)等參數(shù),實時轉(zhuǎn)化為可實際進(jìn)行虛擬化仿真的通斷性、鏈路延時、鏈路誤碼率等參數(shù)。衛(wèi)星網(wǎng)絡(luò)特征參數(shù)差異化仿真主要使云平臺能夠逼真仿真出鏈路間歇性、延時及誤碼率等衛(wèi)星鏈路動態(tài)特性。衛(wèi)星網(wǎng)絡(luò)特征參數(shù)處理與描述方法以及衛(wèi)星網(wǎng)絡(luò)特征參數(shù)差異化仿真主要采用文獻(xiàn)[9-10]中所提技術(shù),這里不再贅述。
衛(wèi)星網(wǎng)絡(luò)特征參數(shù)正向動態(tài)控制主要將衛(wèi)星模型網(wǎng)絡(luò)計算獲得的天地一體化信息網(wǎng)絡(luò)中的各類衛(wèi)星鏈路的通斷性、鏈路延時、鏈路誤碼率等參數(shù)實時加載到衛(wèi)星仿真網(wǎng)絡(luò)中,借助于衛(wèi)星網(wǎng)絡(luò)特征參數(shù)差異化仿真,實現(xiàn)衛(wèi)星仿真網(wǎng)絡(luò)的各類參數(shù)的實時動態(tài)仿真。衛(wèi)星網(wǎng)絡(luò)特征參數(shù)正向動態(tài)控制在第4節(jié)會重點展開介紹。
面向STK計算模型的反向?qū)崟r調(diào)控主要監(jiān)測衛(wèi)星仿真網(wǎng)絡(luò)出現(xiàn)的各種可能動態(tài)變化(例如通信鏈路、飛行器軌道、衛(wèi)星軌道、衛(wèi)星姿態(tài)等),并將相應(yīng)變化實時反饋到衛(wèi)星模型網(wǎng)絡(luò)中,通過進(jìn)一步實時計算并將動態(tài)結(jié)果傳導(dǎo)到衛(wèi)星仿真網(wǎng)絡(luò)中,實現(xiàn)基于云平臺的天地一體化信息網(wǎng)絡(luò)的動態(tài)變化仿真。面向STK計算模型的反向?qū)崟r調(diào)控在第5節(jié)會重點展開介紹。
2.2 動態(tài)聯(lián)動仿真體系架構(gòu)
面向天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動仿真體系架構(gòu)融合了OpenStack云平臺分布式架構(gòu)以及通過STKX接口實現(xiàn)的STK場景管控系統(tǒng)。如圖2所示,主要分為STK衛(wèi)星模型計算節(jié)點及OpenStack云平臺兩部分,其中OpenStack云平臺主要包括控制節(jié)點、網(wǎng)絡(luò)節(jié)點、若干計算節(jié)點。所有節(jié)點均采用網(wǎng)絡(luò)時間同步協(xié)議NTP,選取控制節(jié)點時間作為統(tǒng)一時間參考,以保證各節(jié)點間的同步性與實時性。
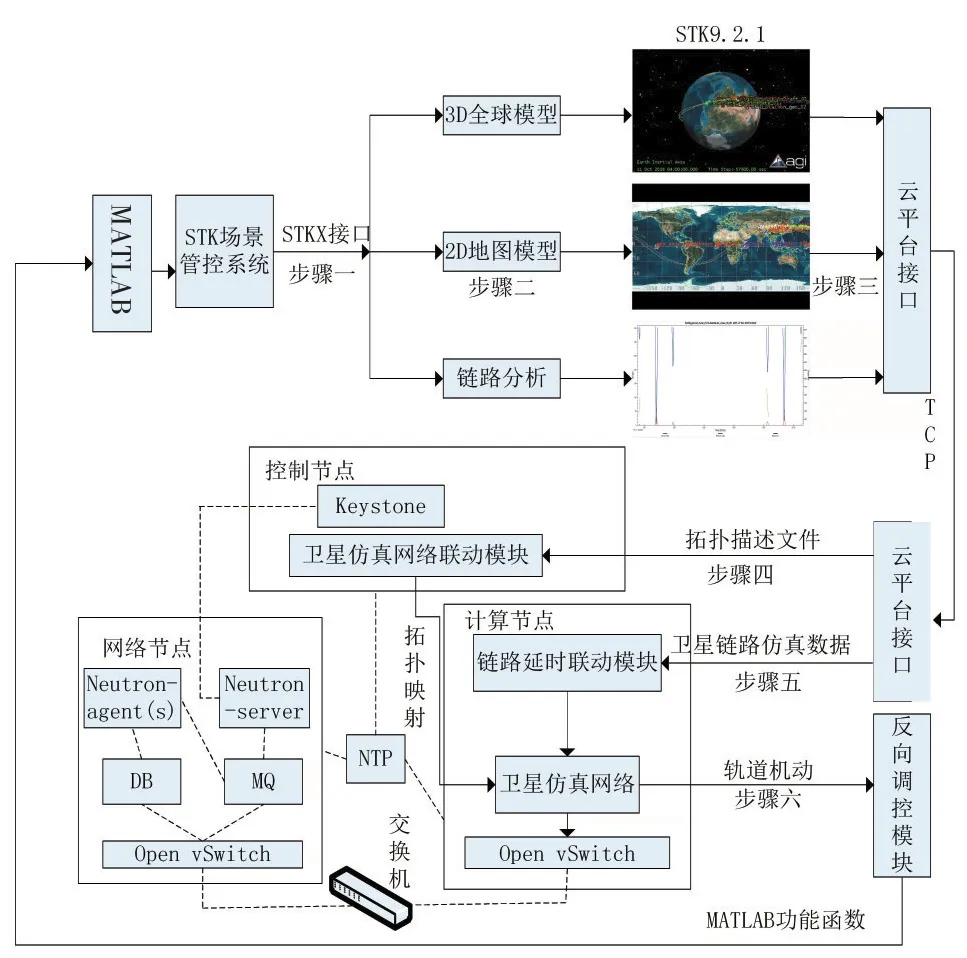
圖2 天地一體化衛(wèi)星網(wǎng)絡(luò)動態(tài)聯(lián)動仿真架構(gòu)
STK衛(wèi)星模型計算節(jié)點負(fù)責(zé)整個仿真平臺的數(shù)據(jù)層面,為OpenStack云平臺提供衛(wèi)星網(wǎng)絡(luò)仿真源數(shù)據(jù);OpenStack云平臺負(fù)責(zé)整個仿真平臺的控制層面,接收到仿真數(shù)據(jù)后,實時動態(tài)控制天地一體化仿真網(wǎng)絡(luò)拓?fù)浼靶l(wèi)星仿真鏈路的鏈路特性,保持衛(wèi)星仿真網(wǎng)絡(luò)與STK衛(wèi)星模型網(wǎng)絡(luò)拓?fù)渑c鏈路特性的動態(tài)聯(lián)動。
天地一體化信息網(wǎng)絡(luò)由地基節(jié)點網(wǎng)、地面互聯(lián)網(wǎng)、天基骨干網(wǎng)、天基接入網(wǎng)、移動通信網(wǎng)等多種異構(gòu)網(wǎng)絡(luò)互聯(lián)融合而成。天地一體化網(wǎng)絡(luò)高性能仿真架構(gòu)采用多尺度融合仿真思想,融合全虛擬化技術(shù)KVM及輕量級虛擬化技術(shù)Docker,結(jié)合低軌與高軌衛(wèi)星節(jié)點自身特性,采用不同的虛擬化技術(shù),不僅提高了仿真性能還能避免物理資源浪費。高軌骨干衛(wèi)星、信關(guān)站節(jié)點采用全虛擬化技術(shù)進(jìn)行仿真,能夠滿足天基骨干衛(wèi)星鏈路高通量需求;天基接入網(wǎng)節(jié)點則采用輕量級虛擬化技術(shù)進(jìn)行仿真,能夠滿足天基接入節(jié)點快速轉(zhuǎn)發(fā)需求。基于圖2,天地一體化衛(wèi)星網(wǎng)絡(luò)動態(tài)聯(lián)動仿真總體工作流程如下(圖中步驟1至步驟5):
步驟1.首先STK場景管控系統(tǒng)利用STKX接口初始化與STK的連接;
步驟2.STK場景管控系統(tǒng)加載STK場景文件,并設(shè)定STK中仿真場景相關(guān)參數(shù),主要包括STK場景星歷時間、雨衰模型及大氣吸收模型、場景運行步長等參數(shù);借助STK中3D模型與2D地圖模型中的衛(wèi)星網(wǎng)絡(luò)拓?fù)渖上鄳?yīng)衛(wèi)星場景的拓?fù)涿枋鑫募焕肧TK中的計算模型進(jìn)行鏈路計算分析,根據(jù)對對象間可見性建模計算出衛(wèi)星鏈路通斷,根據(jù)對鏈路距離建模計算出衛(wèi)星鏈路延時,根據(jù)對衛(wèi)星對象接收機(jī)、發(fā)射機(jī)建模計算出衛(wèi)星鏈路誤碼率;
步驟3.通過STK衛(wèi)星模型計算節(jié)點與云平臺接口,推送衛(wèi)星網(wǎng)絡(luò)拓?fù)涿枋鑫募野匆欢〞r間步長向云平臺上的計算節(jié)點實時推送衛(wèi)星鏈路仿真源數(shù)據(jù);
步驟4.衛(wèi)星網(wǎng)絡(luò)拓?fù)渎?lián)動模塊負(fù)責(zé)解析拓?fù)涿枋鑫募馕鲂畔ü?jié)點信息及網(wǎng)段信息,節(jié)點信息主要包括節(jié)點類型、節(jié)點大小、衛(wèi)星鏡像類型;網(wǎng)段信息包括網(wǎng)絡(luò)名、網(wǎng)絡(luò)子網(wǎng);
步驟5.衛(wèi)星網(wǎng)絡(luò)聯(lián)動仿真模塊負(fù)責(zé)動態(tài)、實時控制云平臺中衛(wèi)星鏈路特性,主要包括鏈路通斷、延時、延時抖動、數(shù)據(jù)分組丟失率及帶寬等。
步驟6.反向?qū)崟r調(diào)控模塊負(fù)責(zé)實時監(jiān)控仿真網(wǎng)絡(luò)中地面站針對衛(wèi)星的調(diào)控指令,包括軌道機(jī)動、姿態(tài)調(diào)控、太陽帆板閉合等動態(tài)參數(shù),虛擬衛(wèi)星節(jié)點將調(diào)控指令發(fā)送到計算模型的反向調(diào)控模塊,并且指令將被發(fā)送到STK模擬節(jié)點中的MATLAB上,由MATLAB遠(yuǎn)程控制STK對計算模型中相對應(yīng)的衛(wèi)星軌道參數(shù)、太陽能帆板形態(tài)或者衛(wèi)星姿態(tài)的調(diào)整。
3 衛(wèi)星網(wǎng)絡(luò)特征參數(shù)正向動態(tài)控制
天地一體化衛(wèi)星網(wǎng)絡(luò)中,衛(wèi)星鏈路特性多樣且具有時變性,仿真過程中對時變性要求最高的即為鏈路延時,原因在于衛(wèi)星一直處于不斷運動中,衛(wèi)星間鏈路長度也在時刻變化。為此,重點介紹鏈路延遲參數(shù)的正向動態(tài)控制過程,其他參數(shù)的正向動態(tài)控制過程類似。
3.1 鏈路延遲參數(shù)的正向動態(tài)控制
面向鏈路延遲參數(shù)的正向動態(tài)控制過程仿真流程如圖3所示。主要步驟如下:
步驟1.鏈路延遲參數(shù)的正向動態(tài)控制驅(qū)動引擎首先初始化與STK連接。
步驟2.完成初始化后驅(qū)動引擎開始工作,獲取當(dāng)前時刻時間T。
步驟3.驅(qū)動引擎利用MATLAB并行計算優(yōu)勢,使用STK接口函數(shù)stkAccReport獲取當(dāng)前時刻T下衛(wèi)星計算模型當(dāng)中衛(wèi)星鏈路長度。
步驟4.根據(jù)衛(wèi)星鏈路長度計算鏈路延時數(shù)據(jù)。
步驟5.驅(qū)動引擎將鏈路兩端衛(wèi)星名、延時數(shù)據(jù)封裝成XML格式的延時報告,具體格式見圖3,并將該報告上傳至云平臺。
步驟6.云平臺解析延時報告,獲取鏈路兩端衛(wèi)星名、延時數(shù)據(jù),根據(jù)衛(wèi)星名匹配到相應(yīng)的虛擬衛(wèi)星鏈路,并行配置每條虛擬衛(wèi)星鏈路延時。

圖3 面向鏈路延遲參數(shù)的正向動態(tài)控制
3.2 衛(wèi)星仿真網(wǎng)絡(luò)鏈路延時并行動態(tài)仿真
在衛(wèi)星仿真網(wǎng)絡(luò)部署完成之后,對于仿真節(jié)點及仿真拓?fù)湫畔ⅲ紝⒈4孢M(jìn)數(shù)據(jù)庫,關(guān)鍵信息包括衛(wèi)星名、實例名、網(wǎng)段名等,關(guān)鍵屬性表如表1所示。

表1 拓?fù)湫畔鞂傩员?/p>
云平臺解析延時驅(qū)動引擎上傳的XML格式的延時數(shù)據(jù)報告,將報告信息下發(fā)給圖2中鏈路延時聯(lián)動模塊,主要包括發(fā)送方衛(wèi)星名、接收方衛(wèi)星名以及延時數(shù)據(jù),延時動態(tài)聯(lián)動流程如下:
步驟1.查詢拓?fù)湫畔欤鶕?jù)發(fā)送方衛(wèi)星名sate_src與接收方衛(wèi)星名sate_dst,確定鏈路網(wǎng)段名net;
步驟2.根據(jù)鏈路網(wǎng)段名,確定云平臺上發(fā)送方衛(wèi)星sate_src的實例名Ins_name;
步驟3.根據(jù)鏈路網(wǎng)段名,確定云平臺上發(fā)送方衛(wèi)星sate_src與接收方衛(wèi)星sate_dst相連接的網(wǎng)卡MAC地址;
步驟 4.調(diào)用 Libvirt API,根據(jù) Ins_name與 MAC地址,獲取發(fā)送方衛(wèi)星sate_src在OVS上的虛擬網(wǎng)卡tap設(shè)備;
步驟5.在發(fā)送方衛(wèi)星節(jié)點sate_src所在的計算節(jié)點上,使用TC流量限制策略在tap上建立網(wǎng)卡規(guī)則,若此前規(guī)則為空則直接建立netem隊列規(guī)則;若已存在則直接覆蓋當(dāng)前規(guī)則。
4 面向STK計算模型的反向?qū)崟r調(diào)控
實時仿真過程中,不同的衛(wèi)星仿真行為往往導(dǎo)致對衛(wèi)星模型網(wǎng)絡(luò)中的通信鏈路、飛行器軌道、衛(wèi)星軌道、衛(wèi)星姿態(tài)等參數(shù)出現(xiàn)不可預(yù)料的調(diào)整,為此,面向衛(wèi)星虛擬網(wǎng)絡(luò),通過實時監(jiān)控仿真網(wǎng)絡(luò)中地面站針對衛(wèi)星的調(diào)控指令,包括軌道機(jī)動、姿態(tài)調(diào)控、太陽帆板閉合等動態(tài)參數(shù),研究實時狀態(tài)監(jiān)控驅(qū)動的反饋技術(shù),將上述變化反饋到衛(wèi)星模型網(wǎng)絡(luò)中,通過進(jìn)一步實時計算并將動態(tài)結(jié)果傳導(dǎo)到衛(wèi)星仿真網(wǎng)絡(luò)中,實現(xiàn)基于云平臺的天地一體化信息網(wǎng)絡(luò)的動態(tài)變化仿真。
4.1 面向STK計算模型的反向?qū)崟r調(diào)控流程
圖4詳細(xì)描述了面向STK計算模型的反向?qū)崟r調(diào)控流程。OpenStack云計算平臺上的虛擬地面站節(jié)點能夠向虛擬衛(wèi)星節(jié)點發(fā)送命令,要求衛(wèi)星進(jìn)行軌道機(jī)動操作、調(diào)整衛(wèi)星姿態(tài)或太陽能帆板(形態(tài)控制)。在接收到命令后,虛擬衛(wèi)星節(jié)點將調(diào)控指令發(fā)送到計算模型的反向調(diào)控模塊,然后調(diào)控指令將被發(fā)送到STK模擬節(jié)點中的MATLAB上,由MATLAB通過功能函數(shù)stkSetPropClassical、stkSetAttitudeCBI、AddArticlation 分別控制STK對計算模型中相對應(yīng)的衛(wèi)星軌道參數(shù)、衛(wèi)星姿態(tài)和太陽能帆板(形態(tài)控制)進(jìn)行調(diào)整。此外,天地一體化衛(wèi)星仿真網(wǎng)絡(luò)中相應(yīng)虛擬衛(wèi)星鏈路的鏈路特性也將發(fā)生變化。
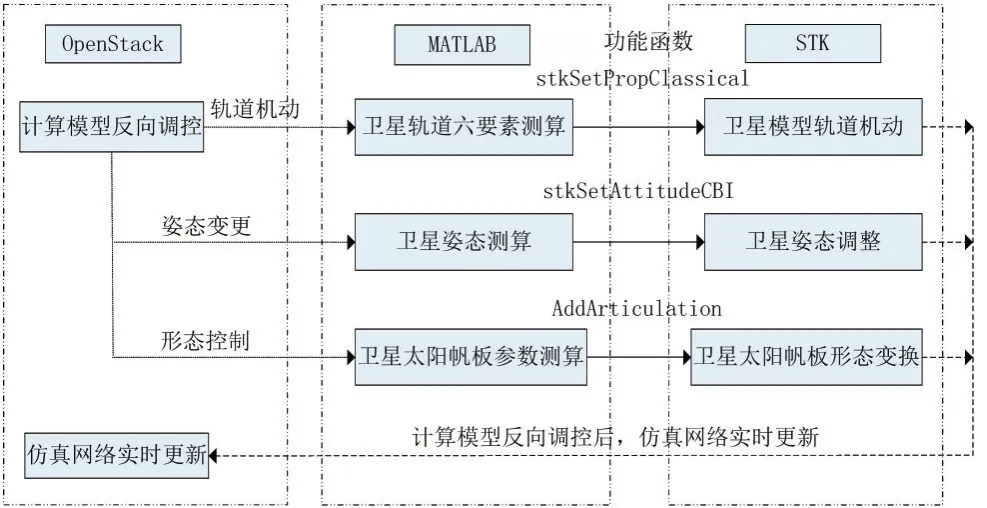
圖4 面向STK計算模型的反向?qū)崟r調(diào)控流程
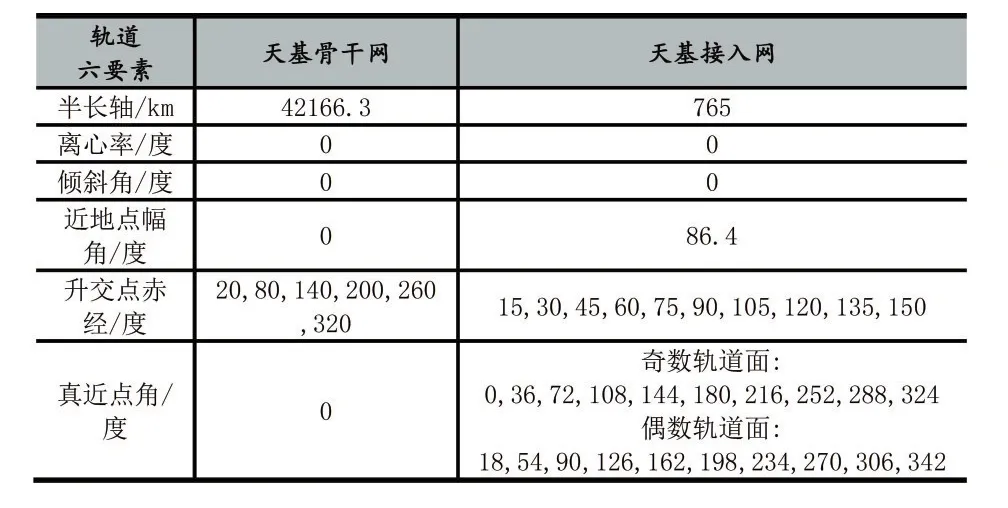
表2 衛(wèi)星軌道參數(shù)
4.2 衛(wèi)星三維模型的建立
逼真的三維模型對于提高系統(tǒng)的仿真效果,增強(qiáng)仿真可信度具有關(guān)鍵作用。衛(wèi)星三維模型如圖5所示,基本圖元包括圓柱形、多邊形以及球形等。由基本圖元組成太陽能帆板、衛(wèi)星天線等局部模型,再由局部模型共同構(gòu)成衛(wèi)星三維模型。衛(wèi)星三維模型腳本是一個倒置的樹狀結(jié)構(gòu),每個圖元組件都需要一個父物體,衛(wèi)星模型為所有組件的父物體。
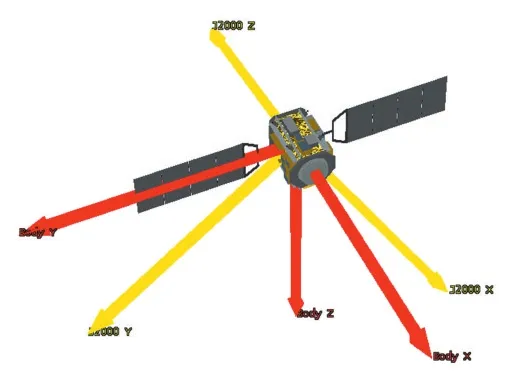
圖5 衛(wèi)星三維模型示例
5 實驗結(jié)果分析
5.1 天地一體化信息網(wǎng)絡(luò)場景
所構(gòu)建的天地一體化信息網(wǎng)絡(luò)場景由天基接入網(wǎng)絡(luò)、天基骨干網(wǎng)絡(luò)以及地面網(wǎng)絡(luò)組成。天基接入網(wǎng)絡(luò)由120顆LEO衛(wèi)星組成,天基骨干網(wǎng)絡(luò)由6顆GEO衛(wèi)星組成。地面用戶可以通過天基接入網(wǎng)絡(luò)連接到天地一體化網(wǎng)絡(luò),從而獲得衛(wèi)星電話等服務(wù)。天基骨干網(wǎng)絡(luò)負(fù)責(zé)長途通信和信息交換。
天基接入網(wǎng)和天基骨干網(wǎng)的設(shè)計目標(biāo)如下:天基骨干網(wǎng)絡(luò)能夠提供全球覆蓋,且能夠為我國提供不間斷連接服務(wù);天基接入網(wǎng)能覆蓋中國及周邊地區(qū),地面用戶易于從全球任何地方連接進(jìn)天基接入網(wǎng),包括高緯度地區(qū)。
圖6和圖7展示的分別是天地一體化網(wǎng)絡(luò)的全局和部分場景,衛(wèi)星軌道參數(shù)如表2所示。場景方案主要包括120顆低軌道LEO衛(wèi)星、6顆高軌道GEO衛(wèi)星。低軌道LEO衛(wèi)星分為12個軌道平面,每個軌道面10顆衛(wèi)星,GEO星座分布在一個軌道面,負(fù)責(zé)為地面寬帶用戶接入衛(wèi)星接入天基骨干網(wǎng)絡(luò),為用戶提供網(wǎng)頁瀏覽、Ftp上傳下載、Email郵件以及即時通訊等寬帶服務(wù),低軌道LEO衛(wèi)星星座為地面用戶提供注冊、通話、短信等服務(wù)。

圖6 天地一體化信息網(wǎng)絡(luò)整體場景
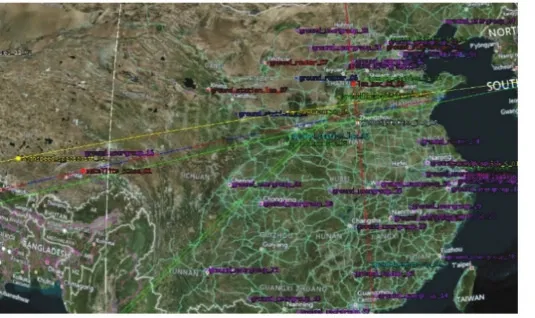
圖7 天地一體化信息網(wǎng)絡(luò)局部場景
5.2 仿真場景的軟硬件環(huán)境
基于OpenStack Mitaka版本、STK11及MATLAB 2013a搭建了本文提出的天地一體化信息網(wǎng)絡(luò)的動態(tài)聯(lián)動系統(tǒng),用于仿真5.1節(jié)中的天地一體化信息網(wǎng)絡(luò)場景,并進(jìn)行相關(guān)的實驗驗證。
實驗所采用的計算資源為2臺機(jī)架式服務(wù)器,分別為計算節(jié)點1與計算節(jié)點2組成,如圖8所示。計算節(jié)點1采用Dell PowerEdge R830機(jī)架式服務(wù)器,處理器為Intel Xeon E5-4620 v4*2,內(nèi)存64G;計算節(jié)點2采用Dell PowerEdge R730 2U機(jī)架式服務(wù)器,處理器為Intel Xeon CPU E5-2620 v3*2,內(nèi)存 16G。OpenStack平臺的物理服務(wù)器,包括計算節(jié)點、控制節(jié)點與網(wǎng)絡(luò)節(jié)點均通過以太網(wǎng)交換機(jī)互連,操作系統(tǒng)均為Centos 7.2。
天地一體化仿真網(wǎng)絡(luò)拓?fù)洳渴鹎闆r如圖8所示,衛(wèi)星網(wǎng)絡(luò)主要由天基接入網(wǎng)和天基骨干網(wǎng)組成。其中,120顆天基接入網(wǎng)衛(wèi)星節(jié)點部署在計算節(jié)點1,衛(wèi)星分布在12個軌道面,每個軌道面10顆衛(wèi)星;6顆天基骨干網(wǎng)衛(wèi)星節(jié)點部署在計算節(jié)點2上,衛(wèi)星分布在同一軌道,呈雙環(huán)結(jié)構(gòu),臨近衛(wèi)星節(jié)點互相備份。二層交換機(jī)負(fù)責(zé)天基接入網(wǎng)、天基骨干網(wǎng)內(nèi)部通信,跨計算節(jié)點通信則通過Open vSwitch交換機(jī),連接至物理交換機(jī),實現(xiàn)天基接入網(wǎng)與天基骨干網(wǎng)的互聯(lián)互通。
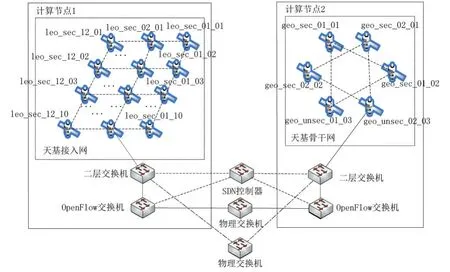
圖8 天地一體化信息網(wǎng)絡(luò)仿真場景部署
5.3 衛(wèi)星鏈路延時動態(tài)聯(lián)動仿真測試
在STK計算模型中構(gòu)建圖8中的天地一體化衛(wèi)星網(wǎng)絡(luò)場景。其中衛(wèi)星網(wǎng)絡(luò)中的衛(wèi)星鏈路主要分為兩類:一類是相同高度軌道星間ISL類型鏈路,包括軌道內(nèi)鏈路及軌道間鏈路,另一類是不同高度軌道間IOL類型鏈路。星歷周期設(shè)置為16 Jan 2020 00:00:00.000到17 Jan 2019 00:00:00.000,仿真步長為60秒。
衛(wèi)星靜態(tài)、動態(tài)鏈路延時動態(tài)聯(lián)動仿真測試結(jié)果分別如圖9、圖10所示。圖9表明,衛(wèi)星靜態(tài)鏈路的延時動態(tài)聯(lián)動仿真具有很高的逼真性;圖10表明,衛(wèi)星鏈路延時實際測試數(shù)據(jù)曲線與衛(wèi)星鏈路長度曲線周期性及動態(tài)變化趨勢一致,表明也能夠支撐衛(wèi)星動態(tài)鏈路的延時仿真,且同樣具有很高的逼真性。

圖9 天地一體化衛(wèi)星靜態(tài)鏈路延時動態(tài)聯(lián)動仿真測試

圖10 天地一體化衛(wèi)星動態(tài)鏈路延時動態(tài)聯(lián)動仿真測試
5.4 衛(wèi)星網(wǎng)絡(luò)仿真拓?fù)鋾r變測試
衛(wèi)星與信關(guān)站間鏈路連接關(guān)系存在間歇性,因此衛(wèi)星網(wǎng)絡(luò)拓?fù)鋾r刻都在發(fā)生變化。為驗證OpenStack云平臺支持對衛(wèi)星網(wǎng)絡(luò)拓?fù)涞臅r變仿真,測試對象為leo_01和leo_02兩條鏈路組成的網(wǎng)絡(luò)拓?fù)洌謩e在T1時刻與T2時刻,查看該低軌衛(wèi)星星座拓?fù)涞倪B接關(guān)系,兩時刻測試拓?fù)淙鐖D11(a)(b)所示。可見兩時刻各衛(wèi)星網(wǎng)絡(luò)的連接關(guān)系發(fā)生了變化。將leo_unsec_01_01切斷與leo_unsec_02_01低軌衛(wèi)星的連接的yy_net133網(wǎng)絡(luò)。拓?fù)淝袚Q前l(fā)eo_unsec_01_01與leo_unsec_02_01間數(shù)據(jù)包路由途徑如圖11(c)所示,數(shù)據(jù)包經(jīng),拓?fù)淝袚Q后leo_unsec_01_01與leo_unsec_02_01間數(shù)據(jù)包路由途徑如圖11(d)所示,切換后由leo_unsec_01_01衛(wèi)星的數(shù)據(jù)包將經(jīng)過leo_unsec_01_02衛(wèi)星和leo_unsec_02_02衛(wèi)星的轉(zhuǎn)發(fā)到leo_unsec_02_01。

圖11 衛(wèi)星網(wǎng)絡(luò)仿真拓?fù)鋾r變測試
5.5 衛(wèi)星姿態(tài)實時變化仿真測試
為驗證OpenStack云平臺對STK中計算模型反向狀態(tài)調(diào)控的有效性,反向調(diào)控實驗對象選用低軌天基接入衛(wèi)星leo_unsec_01_01,在云平臺中反向調(diào)控模塊監(jiān)控到仿真網(wǎng)絡(luò)中地面信關(guān)站對衛(wèi)星的姿態(tài)調(diào)控指令,該指令傳輸?shù)組ATLAB中,MATLAB使用stkSetAttitudeCBI功能函數(shù)直接控制STK計算模型中該衛(wèi)星的太陽能帆板打開。
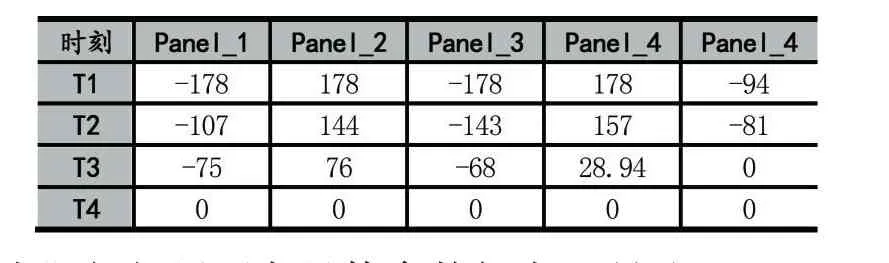
表3 太陽帆板展開角/deg
太陽帆板展開角具體參數(shù)如表3所示。Panel_1、Panel_2、Panel_3、Panel_4、Panel_5 為衛(wèi)星太陽帆板鉸鏈機(jī)構(gòu),通過改變鉸鏈展開角度從而控制太陽帆板閉合狀態(tài)。OpenStack云平臺向STK中衛(wèi)星計算模型發(fā)送太陽帆板調(diào)控指令,開始執(zhí)行衛(wèi)星太陽帆板展開操作。衛(wèi)星太陽帆板模型展開過程如圖12所示,可見能夠支持衛(wèi)星計算模型的反向調(diào)控控制。

圖12 太陽能帆板的展開
6 結(jié)語
天地一體化衛(wèi)星網(wǎng)絡(luò)作為信息時代的戰(zhàn)略性基礎(chǔ)設(shè)施,對于促進(jìn)國家科技發(fā)展具有重要作用。在實際部署之前,天地一體化網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)、網(wǎng)間互聯(lián)安全網(wǎng)關(guān)及終端接入鑒權(quán)等必須經(jīng)過嚴(yán)格的評估和驗證,因此仿真測試平臺的存在必不可少。基于STK計算模型與云平臺提出的一種面向天地一體化信息網(wǎng)絡(luò)的仿真衛(wèi)星網(wǎng)絡(luò)動態(tài)聯(lián)動架構(gòu),融合STK與OpenStack仿真優(yōu)勢,分別采用鏈路延時驅(qū)動引擎與星地鏈路切換引擎,由計算模型驅(qū)動仿真網(wǎng)絡(luò),保持了延時與切換信息的動態(tài)聯(lián)動;此外,支持OpenStack云平臺對STK計算模型的反向調(diào)控。實驗結(jié)果表明,仿真平臺不僅能夠滿足天地一體化通信網(wǎng)絡(luò)中衛(wèi)星鏈路延時時變仿真需求,而且支持對仿真衛(wèi)星的反向調(diào)控,能夠支持各種實際應(yīng)用的部署與性能評估。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
