三維激光掃描技術(shù)在大跨度機(jī)庫屋蓋鋼結(jié)構(gòu)施工過程中的應(yīng)用
2020-08-07 08:42:00李建功張化超白晉合
建筑施工 2020年4期
王 磊 李建功 李 濤 杜 欽 張化超 白晉合
北京建工集團(tuán)有限責(zé)任公司 北京 100055
1 工程概況
北京大興國際機(jī)場南航1號機(jī)庫屋蓋跨度405 m,進(jìn)深100 m。屋蓋采用由平面桁架及單層斜放四角錐網(wǎng)架構(gòu)成的組合結(jié)構(gòu)體系,支承體系由箱形混凝土柱、四肢鋼管混凝土柱、雙肢格構(gòu)鋼柱及柱間支撐組成。桁架體系由沿進(jìn)深方向設(shè)置的4道45°斜向桁架及沿大門開口邊設(shè)置的下沉式大門桁架、沿結(jié)構(gòu)縱向設(shè)置的一字形桁架構(gòu)成(圖1)。大門桁架截面總高度11.5 m,下沉3.0 m;上弦中心標(biāo)高38.50 m,下弦中心標(biāo)高27.00 m;斜桁架及一字形桁架截面高度8.5 m,上弦中心標(biāo)高38.50 m,下弦中心標(biāo)高30.00 m。在上述桁架基礎(chǔ)上布置單層斜放四角錐網(wǎng)架,厚度4.25 m,基本網(wǎng)格尺寸6.0 m 6.0 m,上弦中心標(biāo)高38.50 m,下弦中心標(biāo)高34.25 m。
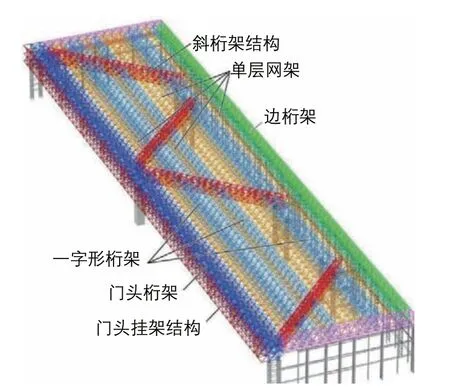
圖1 機(jī)庫鋼屋蓋示意
這種新型的“W”形斜桁架+網(wǎng)架的組合結(jié)構(gòu)形式較以往機(jī)庫結(jié)構(gòu)形式減重近1 500 t,但同時(shí)也增加了施工測量的難度和工作量。對于由多達(dá)20余種規(guī)格的20 000多根桿件和大量多角度交會(huì)復(fù)雜節(jié)點(diǎn)構(gòu)成的新型大跨度組合屋蓋施工,選擇技術(shù)先進(jìn)且安全高效的施工方案是重點(diǎn),應(yīng)用先進(jìn)有效的技術(shù)措施來保證鋼構(gòu)件的精準(zhǔn)安裝是關(guān)鍵。
結(jié)合工程實(shí)際情況,針對上述問題,項(xiàng)目采取地面組裝、整體提升[1]方案,鋼結(jié)構(gòu)整體提升總質(zhì)量約7 340 t,其中門頭桁架質(zhì)量約2 600 t,大廳網(wǎng)架質(zhì)量約3 800 t,檁條質(zhì)量約640 t,馬道質(zhì)量約300 t。在提升過程中必須保證同步,采取液壓同步提升并加強(qiáng)過程監(jiān)測。同時(shí),為控制鋼屋蓋在提升過程中的變形,需要經(jīng)過工況驗(yàn)算,合理布置提升點(diǎn)位置,并進(jìn)行鋼網(wǎng)架臨時(shí)加固。
本工程鋼結(jié)構(gòu)網(wǎng)架施工的重、難點(diǎn)為:在地面拼裝及整體提升過程中,必須對網(wǎng)架平面位置及三維空間位置進(jìn)行精準(zhǔn)定位,保證鋼網(wǎng)架在整體提升及荷載逐步增加過程中產(chǎn)生的變形量滿足設(shè)計(jì)和規(guī)范要求;必須選用先進(jìn)的測量方法、高精度的測量設(shè)備進(jìn)行鋼網(wǎng)架施工全過程的測量定位,從而提高拼裝精度,保證整體網(wǎng)架結(jié)構(gòu)的精準(zhǔn)安裝和安裝完成后整體結(jié)構(gòu)變形值符合要求。
2 測量方案選擇
傳統(tǒng)測量方式[2]為接觸式測量,由于以下原因,在本工程難以實(shí)現(xiàn):
1)屋蓋跨度405 m,進(jìn)深100 m,采用傳統(tǒng)測量方式需投入大量人力、物力,測量周期長,難以滿足現(xiàn)場高效施工要求。
2)桁架截面總高度11.50 m,斜桁架及一字形桁架截面高度8.50 m,四角錐網(wǎng)架厚度4.25 m,傳統(tǒng)測量方法的操作空間要求難以滿足。網(wǎng)架提升過程中無法采用傳統(tǒng)測量方法進(jìn)行結(jié)構(gòu)變形監(jiān)測。
3)桁架、網(wǎng)架拼裝高度高,提升完成后距地面30 m以上,且網(wǎng)架平面尺寸405 m 100 m,采用傳統(tǒng)測量方法需多種輔助測量措施,人力投入大、工效低,測量人員高空作業(yè)的安全風(fēng)險(xiǎn)較高。
4)傳統(tǒng)測量方法為接觸式測量,影響測量精度的因素多,且單位時(shí)間內(nèi)施測的測量特征點(diǎn)數(shù)量有限,難以實(shí)現(xiàn)覆蓋大量結(jié)構(gòu)特征點(diǎn)的高效實(shí)時(shí)監(jiān)控測量。
考慮到以上因素,結(jié)合本工程實(shí)際情況,決定采用三維激光掃描技術(shù)進(jìn)行網(wǎng)架拼裝、提升全過程測量控制及網(wǎng)架提升完成后結(jié)構(gòu)整體三維空間結(jié)構(gòu)掃描分析,以保證整體網(wǎng)架結(jié)構(gòu)安裝的精準(zhǔn)度。本工程實(shí)施三維激光掃描技術(shù)存在以下必備條件:
1)在設(shè)計(jì)階段即結(jié)合BIM軟件進(jìn)行建模、設(shè)計(jì),在屋蓋鋼結(jié)構(gòu)施工前,針對網(wǎng)架各桿件、節(jié)點(diǎn)進(jìn)行深化設(shè)計(jì)并形成BIM模型[3],為施工階段提供完整的BIM模型參照。
2)采用便攜式計(jì)算機(jī)輔助三維測量設(shè)備系統(tǒng)及軟件,在線計(jì)算機(jī)輔助三維坐標(biāo)測量,創(chuàng)建虛擬模型對現(xiàn)有模型進(jìn)行評估。
3)采用針對三維激光掃描儀研發(fā)的專業(yè)點(diǎn)云管理軟件,通過軟件特殊的計(jì)算方式,將掃描儀數(shù)據(jù)優(yōu)化處理,自動(dòng)去除不合理的噪聲點(diǎn)。自動(dòng)識(shí)別掃描過程中的參考球,實(shí)現(xiàn)全自動(dòng)數(shù)據(jù)拼接。通過與全站儀和GPS大地坐標(biāo)控制點(diǎn)數(shù)據(jù)以及標(biāo)靶點(diǎn)數(shù)據(jù)的結(jié)合,實(shí)現(xiàn)真實(shí)坐標(biāo)轉(zhuǎn)換,以平差方式提高大范圍數(shù)據(jù)拼接精度。
4)全站儀在免棱鏡狀態(tài)下的測量精度不如棱鏡測量,棱鏡測量精度可以達(dá)到1 mm,三維激光掃描儀標(biāo)靶識(shí)別精度為1 mm,如果能結(jié)合兩者,即可將2 mm的精度提高到1 mm。因此,本工程將傳統(tǒng)紙質(zhì)標(biāo)靶改為特制棱鏡球以提高精度。
5)本工程網(wǎng)架結(jié)構(gòu)復(fù)雜,截面高度4.25~11.50 m,提升完成后整體標(biāo)高27.00~38.50 m。如何解決地面拼裝、鋼結(jié)構(gòu)提升及提升完成后高空監(jiān)測問題是測量工作的難點(diǎn)。為此,采用自主研制的磁吸式支架來解決空中測量問題。
3 測量實(shí)施
3.1 測量設(shè)備選擇
1)掃描儀。選用Focus 3DX 350s掃描儀(圖2)。
2)自制棱鏡球。本工程采用自制棱鏡球,將棱鏡與三維激光掃描儀標(biāo)靶結(jié)合在一起,制作成精度1 mm的特制棱鏡球(圖3)。

圖2 Focus 3DX 350s掃描儀

圖3 自制棱鏡球
3)磁吸式支架。本工程采用自制磁吸式支架進(jìn)行網(wǎng)架內(nèi)、提升中以及提升完成后的空中監(jiān)測。磁吸式支架可以固定在鋼結(jié)構(gòu)網(wǎng)架桿件上(圖4),有效解決空中復(fù)雜網(wǎng)架結(jié)構(gòu)內(nèi)測量儀器的安置問題,節(jié)約了人力、物力,且使用安全、便捷。

圖4 磁吸式支架
3.2 三維激光掃描
3.2.1 全站儀測量控制點(diǎn)布設(shè)
機(jī)庫大廳內(nèi)部周圍布置3個(gè)控制點(diǎn)作為永久監(jiān)測點(diǎn),利用高精度工程測量全站儀[4]建立局部坐標(biāo)控制網(wǎng),統(tǒng)一坐標(biāo)系,并測量該坐標(biāo)系下的每一個(gè)標(biāo)靶坐標(biāo)。結(jié)合掃描儀特制棱鏡球獲取多個(gè)標(biāo)靶點(diǎn)坐標(biāo),對掃描儀局部坐標(biāo)進(jìn)行控制;特制棱鏡球與掃描標(biāo)靶擺放形成坐標(biāo)控制網(wǎng),對機(jī)庫大廳整體掃描點(diǎn)云坐標(biāo)進(jìn)行控制。
3.2.2 掃描站點(diǎn)布設(shè)
掃描開始前,根據(jù)現(xiàn)場環(huán)境規(guī)劃掃描站點(diǎn)和標(biāo)靶點(diǎn)分布圖,使掃描設(shè)站以及標(biāo)靶點(diǎn)分布盡量均勻,掃描站點(diǎn)之間要有30%的重復(fù)區(qū)域。對于重點(diǎn)掃描區(qū)域,應(yīng)多角度、多方位架設(shè)站點(diǎn),保證掃描數(shù)據(jù)90%以上的完整性。
3.2.3 標(biāo)靶布設(shè)
參考球布設(shè)在2次掃描測站中間,2站之間至少有3個(gè)可視參考球。參考球之間應(yīng)有一定的高度差,參考球到儀器的距離根據(jù)掃描儀分辨率設(shè)置有所不同,具體如下:1/1掃描分辨率對應(yīng)參考球擺放75 m,1/2掃描分辨率對應(yīng)參考球擺放45 m,1/4掃描分辨率對應(yīng)參考球擺放25 m,1/5掃描分辨率對應(yīng)參考球擺放20 m,1/8掃描分辨率對應(yīng)參考球擺放12 m。以上數(shù)據(jù)針對FARO掃描儀標(biāo)準(zhǔn)參考球直徑14.5 cm。棱鏡球直徑10 cm,應(yīng)在以上數(shù)據(jù)的基礎(chǔ)上削減30%。標(biāo)靶布設(shè)[5]與掃描儀視角方向成垂直角度,距離控制在10 m以內(nèi)。對于機(jī)庫屋蓋鋼結(jié)構(gòu)網(wǎng)架掃描,我們采用1/4掃描分辨率3倍倍率設(shè)置[6]來進(jìn)行高精度數(shù)據(jù)掃描測量。
3.2.4 掃描數(shù)據(jù)
儀器準(zhǔn)備完畢后,首先建立工程掃描文件夾,記錄掃描時(shí)間,查看掃描儀的水平傾角儀以確保掃描儀器盡量水平放置。每站均需檢查水平傾角儀并整平,根據(jù)現(xiàn)場情況及后期處理結(jié)果需求設(shè)定分辨率及質(zhì)量。
按鍵掃描之前,應(yīng)先撤出掃描區(qū)域范圍內(nèi)的施工人員。掃描后,檢查數(shù)據(jù)并查看掃描結(jié)果是否正常,參考球以及棱鏡球是否在測量范圍之內(nèi)。無誤后,將儀器搬動(dòng)至下一站,以推進(jìn)方式擺放參考球,確保與下一次測站之間至少有3個(gè)公共參考球,再布設(shè)相應(yīng)標(biāo)靶。重復(fù)上述移站步驟,完成掃描工作。
3.3 數(shù)據(jù)處理分析
3.3.1 單次測量的三維數(shù)據(jù)處理
1)將數(shù)據(jù)導(dǎo)入FARO SCENE[7]軟件,并建立工程項(xiàng)目文件。
2)數(shù)據(jù)拼接,剔除掃描噪聲及遮擋,導(dǎo)入全站儀坐標(biāo)數(shù)據(jù)。
3)數(shù)據(jù)整合,迭代計(jì)算減少拼接誤差,控制整體拼接精度≤3 mm。
4)將掃描儀采集影像數(shù)據(jù)與點(diǎn)云數(shù)據(jù)自動(dòng)疊加,對正掃描數(shù)據(jù)方向(使用全站儀進(jìn)行坐標(biāo)控制時(shí)跳過此步),創(chuàng)建硬盤點(diǎn)云數(shù)據(jù)。
5)創(chuàng)建BOX裁剪框,提取被測主體三維掃描通用數(shù)據(jù),創(chuàng)建工作區(qū)webshare數(shù)據(jù)包。
6)將導(dǎo)出的掃描數(shù)據(jù)統(tǒng)一,三角網(wǎng)化,建立三角網(wǎng)mesh模型,剔除噪聲,修補(bǔ)模型,根據(jù)曲率簡化模型,保留模型外形尺寸及細(xì)節(jié)。
7)將符合軟件要求的三角網(wǎng)模型導(dǎo)入設(shè)計(jì)軟件,根據(jù)三角網(wǎng)數(shù)據(jù)進(jìn)行模型拓?fù)浣!?/p>
8)將拓?fù)淠P团c原始高精度掃描三角網(wǎng)進(jìn)行比對分析,控制整體模型公差達(dá)到要求,對沒有達(dá)到要求的部分進(jìn)行二次修改,同時(shí)根據(jù)要求進(jìn)行模型細(xì)化。
9)將最終建立的網(wǎng)架模型在檢測軟件中對比平面圖進(jìn)行尺寸檢核,出具檢測報(bào)告,滿足要求后,導(dǎo)出通用IGES或Stp通用格式模型。
3.3.2 所有測量的三維數(shù)據(jù)處理
將所有網(wǎng)架模型以及高精度三角網(wǎng)模型統(tǒng)一至一個(gè)工程文件內(nèi),進(jìn)行虛擬裝配分析,撰寫裝配分析檢測報(bào)告,制作點(diǎn)云漫游視頻及模型虛擬現(xiàn)實(shí)程序。
3.4 結(jié)果驗(yàn)證
將利用全站儀測量的特征點(diǎn)三維坐標(biāo)與掃描的點(diǎn)云數(shù)據(jù)相同點(diǎn)位坐標(biāo)進(jìn)行對比,驗(yàn)證方法的準(zhǔn)確性。
4 結(jié)語
與傳統(tǒng)測量方法相比,三維激光掃描技術(shù)在大跨度復(fù)雜鋼結(jié)構(gòu)工程施工過程中可以準(zhǔn)確、高效、安全地進(jìn)行測量、監(jiān)測工作。將三維激光掃描數(shù)據(jù)與BIM模型有效地結(jié)合,快速得出構(gòu)件實(shí)際空間位置與BIM模型之間的尺寸偏差,使參建各方更加形象地了解鋼網(wǎng)架在拼裝、提升及卸荷后各桿件的具體位置及變化,方便施工偏差的監(jiān)控調(diào)整。三維激光掃描技術(shù)為今后類似的鋼結(jié)構(gòu)網(wǎng)架工程提供了一種新型的測量、監(jiān)測方式。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:10:10
建材發(fā)展導(dǎo)向(2022年14期)2022-08-19 02:08:18
山東冶金(2022年1期)2022-04-19 13:40:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
