一種輪邊傳動越野車輛電驅動系統設計
2020-08-06 14:42:04杜萬亮李勇解德杰吳昊洋陳文鵬
汽車世界·車輛工程技術(下) 2020年3期
關鍵詞:有限元
杜萬亮 李勇 解德杰 吳昊洋 陳文鵬

摘 要:與集中式驅動相比,輪邊分布式驅動省去了變速器、傳動軸、機械差速器、半軸等部件,把電機移動到車輪側,使其傳動結構變得更為簡單。本方案整車為電池與增程器并聯的電驅動車輛,驅動系統、動力系統的參數需要與工況和性能指標進行匹配設計。整車控制器通過控制多個電機來實現牽引和差速,整車電磁環境復雜、對電機控制系統的動態響應要求較高。本文根據混合動力輪邊分散驅動的特點,綜合整車工況、輕量化和機動性要求高的需求優化系統資源配置,進行電池和增程器系統、電機驅動系統與整車性能與動力需求的匹配分析,主要完成了電機及驅動器的參數匹配、基于有限元的電磁方案優化、采用矢量控制算法提升系統的性能、采用緊湊化的電機結構和雙模塊的控制器機殼以輕量化、采用模塊化的FlexRay通信方案,進行了電機及驅動器的樣機試制和裝車試驗,獲得良好的綜合性能滿足整車需求。
關鍵詞:混合動力;分散驅動;矢量控制;有限元;FlexRay;參數匹配;輕量化
1 整車特性
1.1 整車需求
整車為四輪獨立驅動輪架可調姿混合動力車輛,為滿足全地形高通過性的要求,有原地轉向、越野、最高速、越壕、側傾坡行駛、越障、大坡度爬坡、松軟路面、越野平均速度和續航里程等的基本功能和性能要求。原地轉向、越障、越壕、爬坡工況的動力性能分析需要與車身姿態調節相匹配實現。
1.2 整車特性設計
1.2.1 牽引力計算考慮因素
根據整車動力學的仿真,進行整車阻力和動力性的分析實現整車牽引力的設計。在動力學仿真的基礎上,電驅動系統的設計根據整車動力性能要求綜合整車電源系統資源配置校核整車的加減速和爬坡和原地轉向等工況性能[1]。
根據車輛行駛動力學理論[2],車輛行駛阻力主要分為滾動摩擦阻力、坡道阻力、加速阻力和迎風阻力,可表示為:
其中:
F-整車牽引力;f-輪胎與地面之間的滾動阻力系數;φ(f)-路面平均附著系數;ms-整車質量;α-坡道角度;δ-等效轉動慣量;a-車輛加速度;CD-迎風阻力系數;A-迎風面積;v-車速。
1.2.2 牽引力及功率計算
綜合考慮整車的質心和整車姿態的調節、電機負荷不均的程度、輪胎在各地面的附著能力分別進行原地轉向所需牽引力和爬坡動力的計算。經計算分析,滿足大爬坡度的要求時整車牽引力需求最大。
整車在越野路面滿載下按越野30km/h速度并留有剩余加速度進行額定功率定額;最大功率按照滿足最高車速、大爬坡基礎上,綜合校核整車的加減速性能、電源系統容量、制動性能和制動電阻的吸收能力等綜合確定。
2 電驅動系統方案設計
綜合考慮電機及驅動器的尺寸、重量限制的要求,采用緊湊化的電機結構和雙模塊的控制器機殼并采用鋁合金材料。針對整車的低速過載頻繁、過載轉矩倍數大的特性[3-4],綜合電機的電磁方案和矢量控制算法降低低速過載下的銅耗,改善低速過載下電機的發熱;為了滿足整車的靜默行駛動力性能要求,優化電機與驅動器的電壓設計特性并采用過調制策略保證高速的動力輸出;為了滿足多輪獨立驅動的轉矩輸出的實時性要求,電機驅動器與多輪獨立驅動控制器間采用模塊化的FlexRay通信方案[5]。
2.1 電機電磁方案設計
基于Ansoft軟件進行內置式永磁同步電機的電磁方案設計[3,6,7],利用有限元分析軟件進行主要參數提取和校核各工況下電機磁負荷,采用場路結合的方法進行電機電磁方案設計。采用高磁負荷的電磁方案設計[8]。
2.2 驅動器方案設計
2.2.1 結構設計
采用兩個驅動模塊共用冷卻水道、直流進出線及母排、薄膜電容、低壓轉接電路的雙模塊的控制器機殼。模塊化的FlexRay通信板卡通過支座安裝在驅動器的控制板上。
2.2.2 控制算法仿真
基于永磁同步電機的數學模型和轉子磁場定向的矢量控制原理[9],結合電機的方案設計進行永磁同步電機及其控制算法的仿真[10],利用Simulink建立了永磁同步電機控制系統的仿真模型。
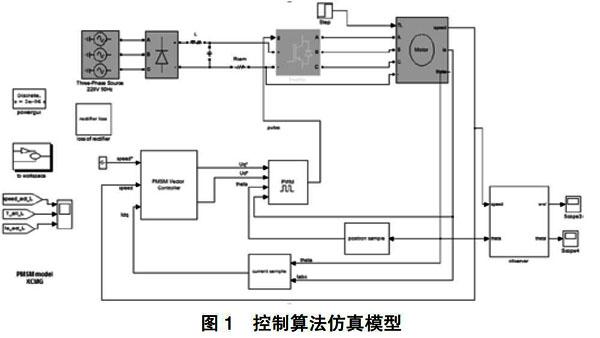
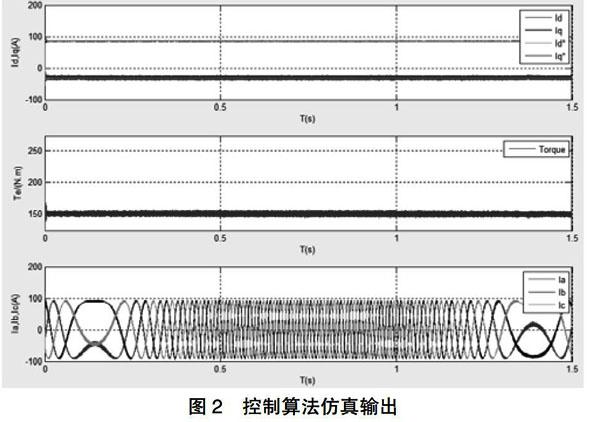
基于simulink搭建的仿真模型見圖1。模型具備最大轉矩電流比控制、高速弱磁控制、電壓空間矢量調制(SVPWM)的基本實現方式,并考慮到高磁負荷的電機方案進行電流環PI調節器飽和的影響分析,并進行了電機磁飽和補償的算法仿真驗證。
某工況整車運行下電驅動系統的仿真結果如圖2。在整個過程中電機都工作在恒轉矩區,采用最大轉矩電流比的控制算法,仿真的電流分配與轉矩輸出與電機的設計相一致。
2.2.3 通信設計
為了減少電磁干擾對系統正常工作產生的影響、增加多輪獨立驅動的實時性,采用新一代車載網絡FlexRay代替CAN網絡為多輪獨立驅動與各電機驅動器的通信網絡。采用模塊化的設計和FlexRay通信子卡實現多輪獨立驅動器與四個電機驅動器的FlexRay局部組網。利用板卡與電機驅動器實現FlexRay網絡的節點通信,只需簡單的讀寫RAM區數據就可以實現FlexRay通信,采用雙通道冗余模式,接收到更新的新數據后將置相應數據位,通知用戶提取數據。FlexRay總線默認波特率:5Mbps。
FlexRay子卡和外面控制器的連接如圖3所示。
2.3 分散驅動的特殊要求
本項目采用多電機驅動,系統輸出的功率富余量比較大,但應考慮電機的負荷不均的發熱影響、因工況和輪載荷的差異需要較大的轉矩輸出過載倍數和驅動器的峰值電流。多輪獨立驅動的防滑控制需要根據整車的工況和動力性能同電機驅動系統的轉矩變化率進行配合設計和聯合調試確定。因多電機驅動整車的電磁環境更復雜,整個驅動系統應考慮電磁干擾的影響,從電驅動系統抗干擾的角度,采用 FlexRay通信方式、進行旋變信號的軟件濾波處理和容錯設計。
3 動力系統的匹配分析
根據整車的動力性能指標進行電驅動系統和動力系統的資源配置和參數匹配設計;電機系統的輸入輸出功率特性應與電池及增程器的設計相匹配,純電行駛和混合動力模式下的工況需求,應結合電機及驅動器的效率設計校核,如在大爬坡要求下需要電機系統在低速下輸出大轉矩,系統的損耗最大,應綜合考慮與電池容量選擇、持續過載放電能力、能量管理策略等相匹配。整車的熱管理應與驅動系統、動力系統的冷卻要求相匹配。
4 樣機及試驗
電機及驅動器的樣機見圖4。進行了樣機的試驗臺測試和裝車試驗,初步試驗結果滿足使用需求。
5 結論
本文對所設計的電驅動系統進行了系統介紹,樣機進行了試驗臺測試和裝車試驗,驗證了方案設計的準確性、與電池及增程器系統的匹配,滿足整機性能基本要求。
本項目配套的整車全地面通過性要求高,整車的動力性能需要電驅動系統同車身姿態調節、輪架翻轉系統、結構設計等相配合實現,還需要深入結合整車資源配置和各系統的參數進行試驗研究電驅動系統的性能及與各系統的匹配性,同時,需要對整車的工況和運行特點進行研究以更好地優化系統的設計。
參考文獻:
[1]裝甲車輛混合動力電傳動技術(第二版)[M].北京:國防工業出版社,2016.
[2]馬德糧.新能源汽車技術[M].北京:清華大學出版社,2017.
[3]西南交通大學電機系.牽引電機[M].北京:中國鐵道出版社,1980.
[4]丁榮軍,黃濟榮.現代變流技術與電氣傳動[M].北京:科學出版社,2009.
[5]李菲,郭愛華,宋德星.基于FlexRay總線的通訊單元設計[J].電子技術,2012(10):79-81.
[6]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997.
[7]趙博,張洪亮.Ansoft 12在工程電磁場中的應用[M].中國水利水電出版社,2013.
[8]成熹.高磁密異步牽引電機磁路計算方法[M].電力機車與城軌車輛,2010(04):15-17.
[9]王成元,夏加寬,孫宜標.現代電機控制技術[M].北京:機械工業出版社,2014.
[10]黃碧霞.永磁同步電機及其控制系統的仿真研究[D].杭州:浙江大學,2008.
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:18
數學物理學報(2022年4期)2022-08-22 04:09:28
減速頂與調速技術(2020年4期)2020-11-22 07:20:26
上海節能(2020年3期)2020-04-13 13:16:16
石油化工建設(2019年6期)2020-01-16 08:03:42
天津醫科大學學報(2019年6期)2019-08-13 07:04:32
鍛壓裝備與制造技術(2016年3期)2016-06-05 09:36:08
機械工程師(2015年10期)2015-02-02 01:14:03
機電產品開發與創新(2014年4期)2014-03-11 16:42:24
上海金屬(2013年4期)2013-12-20 07:57:18