基于BAS算法優化的感應電機參數估計
2020-08-04 12:27:53金逸琿吳濱顧曉峰張曉昕
現代電子技術 2020年3期
金逸琿 吳濱 顧曉峰 張曉昕

摘? 要: 為了提高感應電機系統參數估計與狀態監測的準確性和效率,針對感應電機非線性、強耦合、參數易時變的特性,引入帶外部輸入的非線性自回歸(NARX)神經網絡時序預測模型。針對傳統NARX神經網絡初值依賴和收斂速度慢的問題,利用天牛須搜索算法(BAS)對神經網絡預測模型進行參數尋優,提高神經網絡的收斂速度和預測精度。實驗結果表明,該方法能夠以較簡單的網絡結構高效、準確、穩定地預測估計電機參數。
關鍵詞: 感應電機; NARX神經網絡; 參數估計; 天牛須搜索算法; 收斂速度; 預測精度
中圖分類號: TN98?34; TM346? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)03?0112?04
Induction motor parameter estimation based on BAS algorithm optimization
JIN Yihui1, 2, WU Bin1, 2, GU Xiaofeng1, 2, ZHANG Xiaoxin1, 2
(1. Engineering Research Center of IoT Technology Applications (Ministry of Education), Wuxi 214122, China;
2. Department of Electronic Engineering, Jiangnan University, Wuxi 214122, China)
Abstract: In order to improve the accuracy and efficiency of parameter estimation and condition monitoring of the induction motor system, a time series prediction model based on nonlinear autoregressive with exogenous input (NARX) is introduced in consideration of the characteristics of nonlinearity, strong coupling and time?varying parameters of the induction motor. To solve the problem of initial value dependence and slow convergence speed of traditional NARX neural network, the beetle antennae search (BAS) algorithm is adopted to optimize the parameters of the neural network prediction model and improve convergence rate and prediction accuracy of the neural network. The results of experiments show that the proposed method can predict and estimate the motor parameters efficiently, accurately and steadily with a simple network structure.
Keywords: induction motor; NARX neural network; parameter estimation; BAS algorithm; convergence rate; prediction accuracy
0? 引? 言
感應電機因其結構簡單、維護方便、成本低廉、運行可靠等特點,被廣泛應用于交通運輸、工業生產、能源發電等領域。然而,在不少應用場景中,電機的工作環境往往比較惡劣,需要對其進行實時監測,保障系統的最優控制和可靠運行,才能保證系統的穩定性及安全性,并對可能出現的問題實現預警。因此,對電機系統進行狀態監測,時刻掌握電機準確的運行參數,對電機系統的穩定運行、優化控制、故障預警等具有重要意義。
為了高效、準確地識別電機參數,研究人員提出了多種參數估計與監測方法[1?4]。通過安裝輔助傳感器能夠快速獲取電機的關鍵參數,但是對于復雜工況下的感應電機工作系統,傳感器的安裝和維護增加了驅動系統的復雜性,降低了系統的可靠性,同時增加了成本。因此,利用已有信號測量電機運行參數的無線傳感器技術開始受到重視,其中,包括最小二乘法[5]、卡爾曼濾波[6]、模型參考自適應[7]等方法。不過,這些方法依賴于理想化的電機數學模型,實際運行中的電機系統各項參數易發生時變,這將直接影響算法的精度。
神經網絡因能任意逼近連續非線性函數的特點而被廣泛研究與應用,但傳統BP神經網絡[8]采用靜態框架進行建模,難以準確描述感應電機這類多變量、非線性、強耦合系統的動態性能。描述系統動態性能的神經網絡應具有可以反映系統動態特性和存儲信息的能力,即要求網絡中存在信息的延時與反饋。針對上述問題,本文引入帶外部輸入的非線性自回歸(Nonlinear Autoregressive with exogenous input,NARX)[9]網絡,結合天牛須搜索(Beetle Antennae Search,BAS)算法[10]優化網絡權重和閾值,簡化網絡結構。結果表明,該方法能準確、穩定、動態地預測估計電機參數。
1? 感應電機數學模型
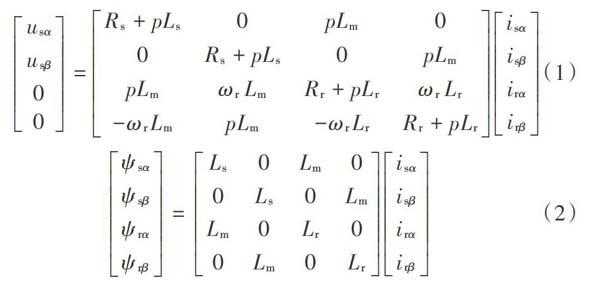
感應電機在兩相靜止坐標系下的電壓方程與磁鏈方程[11]可表示為:
式中:[u]為電壓;[i]為電流;[ψ]為磁鏈;下標中的[s],[r]分別代表定子、轉子;[α],[β]分別代表坐標系的兩軸;[Ls],[Lr],[Lm]分別表示定子電感、轉子電感和定轉子間的互感;[R]為電阻;[p]為微分算子;[ωr]為轉速,可由電壓、電流表示為:
式中:[σ=L2m-LsLr];[u′sα=usα-Rsisα]。
電磁轉矩與負載可表示為:
由上式可知,電機轉速與定子的電壓、電流及其他一些參數之間存在著復雜的非線性關系。給定電機的定子電壓、電流和其他參數后,即可由式(3)進行轉速估計。根據得到的轉速信息,可以進一步估計電機的轉矩負載等其他電氣參數。由于電機參數受工況影響會發生時變,而參數的變化會直接影響預測結果,因此基于電機數學模型的參數估計精度難以保障。
2? 基于BAS算法優化的NARX神經網絡參數估計
2.1? NARX神經網絡
NARX神經網絡是一種基于時間序列的非線性動態循環網絡,它由輸入層、隱含層、輸出層和時延反饋組成,其網絡結構如圖1所示。
NARX神經網絡的輸入、輸出之間并不只是靜態的映射關系,它在BP神經網絡的基礎上將網絡輸出通過延時節點反饋到輸入端。由于延時節點存儲了前幾個時刻的輸入、輸出信息,因此,該網絡模型具有良好的動態特性[9]。網絡的動態行為可描述為:
式中:[y(t-1),y(t-2),…,y(t-n)]是輸出延時項;[u(t-1),u(t-2),…,u(t-n)]是輸入項;[y(t)]是網絡預測估計值。當前輸入與過去輸出的反饋通過隱含層的權重與偏置計算回歸量,進而通過非線性函數[fh]與線性函數[fo]估計預測值。
2.2? 天牛須搜索算法
盡管NARX神經網絡具有良好的動態特性,但其對初始權值的依賴影響了模型訓練的穩定性,并且傳統的神經網絡訓練算法收斂較慢。針對上述問題,文獻[12]利用粒子群算法(PSO)優化NARX網絡權值,對于一般問題的優化,粒子群算法具有速度快、精度高等優點,但是對于高維多參數問題,其計算速度與優化效果明顯變差。為了提高NARX網絡的收斂速度與精度,本文引入BAS算法對NARX網絡進行參數尋優。
BAS算法是最近提出的一種類似于群體智能算法的仿生優化算法,它不需要知道目標函數的具體形式或梯度信息,就可以實現高效尋優。由于BAS算法只需要設置一個個體,所以相較于一般的多參數群智能算法,計算量低、速度快、易于實現,適用于工程應用。
BAS算法由天牛覓食原理啟發而來:對于未知食物源,天牛通過頭前兩須接收到的食物氣味強弱來覓食,根據兩須氣味強弱的差異改變前進方向,逐漸飛向目標,找到全局氣味最強的點。BAS算法具體步驟如下:
1) 將在三維空間搜索的覓食行為引申到[n]維空間,對應[n]維優化問題。設置天牛中心位置為[x],兩須分別位于中心左右兩邊,設為[xleft],[xright],間距為[d],其中,[x],[xleft],[xright]均為[n]維向量。
2) 設置天牛每前進一步之后的方向隨機,也即右須指向左須的方向隨機,避免陷入局部最優。生成一個[n]維單位隨機向量,表示其右須指向左須的方向:
式中[rands(n,1)]表示生成[n]維隨機向量,則左右兩須的位置分別為:
式中:[x(k)],[d(k)]分別表示第[k]次迭代時的中心位置與兩須距離。
3) 根據當前所在位置與目標優化函數[f]計算兩須相應的適應度值[fleft],[fright],以其大小關系確定下一步的前進方向:
式中[S(k)]表示第[k]次迭代時的前進步長。
根據以上三步迭代直到滿足計算終止條件,所得到的中心位置[x]即為目標函數的最優解。
2.3? 基于BAS優化的NARX網絡訓練流程
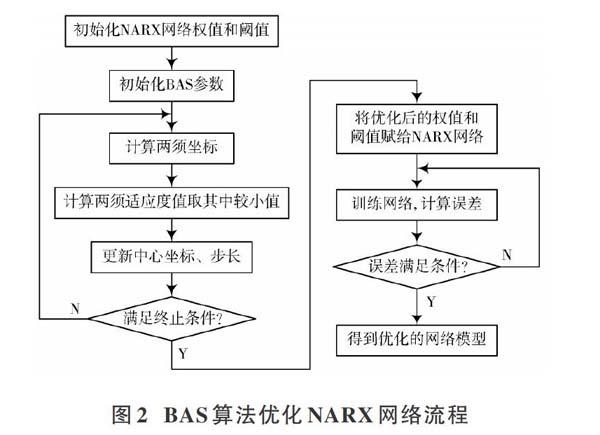
初始化NARX網絡結構與權值,將權值參數的集合設為BAS算法搜索空間,將網絡誤差函數MSE設為目標優化函數,按照2.2節的步驟迭代即可得到全局最優解。基于BAS算法采用固定步長搜索最優解;文獻[13]在每次迭代時對步長乘以衰減系數來提高搜索精度。對于擁有多個參數的NARX網絡,各參數差值較大,數值大小也不與目標函數的適應度值直接相關。固定步長無法兼顧每個參數,易使算法早熟收斂;帶有衰減系數的變步長能細化參數搜索,但是當迭代次數較高后,步長在衰減系數的影響下會變得過小而無法改變參數。
本文中,對于有[n]個參數的目標函數,根據初始化參數設置對應的初始步長[Si],最小步長[S0i]和衰減系數[wi],其中,[i=1,2,…,n]。迭代過程中,如果當前步長能使適應度值減小,表明當前步長有效,則保持該步長不變。基于BAS算法優化的NARX網絡流程如圖2所示。
3? 仿真驗證
為了驗證上述算法對電機參數預測的性能,采用Matlab/Simulink對感應電機系統建立仿真模型,并對NARX神經網絡和BAS算法進行仿真實驗。仿真中所用感應電機參數如下:額定電壓[U=]380 V,額定電流[I=]10 A,額定頻率[f=]50 Hz,定子電阻[Rs=]1.41 Ω,轉子電阻[Rr=]1.39 Ω,定子電感[Ls=]0.178 0 H,轉子電感[Lr=]0.178 0 H,互感[Lm=]0.172 2 H,轉子極對數[np=]2,轉動慣量[J=]0.013 1 kg·m2。
3.1? 數據預處理
利用定子電壓與電流作為訓練樣本,電機模型產生的轉速作為訓練目標,訓練NARX神經網絡,可以得到轉速估計模型。由于電機參數的時變性,真正工況下的輸入信號頻率必然會有所波動,這將減弱網絡預測估計的魯棒性,造成恒定輸出在頻率上的失調。本文將更為穩定的電壓、電流有效值及與轉速高度相關的瞬時功率作為參考,利用瞬時無功功率和轉速信息訓練神經網絡,提高訓練速度和穩定性,同時簡化網絡結構。
3.2? 算法驗證
本文對NARX,PSO?NARX,BAS?NARX三種網絡訓練效果進行比較,以確定訓練模型,其中,PSO算法采用文獻[14]中帶慣性權重與變異因子的粒子群算法。訓練樣本采用電機空載啟動的前0.4 s輸入輸出信號,設置最大迭代次數1 000次,誤差評價標準為均方誤差MSE,分別訓練50次取平均值。訓練結果如圖3所示。
從圖3可以看出,NARX與PSO?NARX網絡初期收斂速度較快,傳統NARX網絡在均方誤差達到0.01后,收斂速度迅速下降;PSO算法收斂曲線有明顯的平臺階段,表明算法陷入局部最優,只有依靠變異因子跳出局部最優時才能進一步收斂;BAS算法雖然初期收斂速度較慢,但是能以穩定的速度收斂到全局最優解,得到精度最好的網絡模型,證明了BAS算法對NARX網絡的參數尋優是有效的。
3.3? 仿真分析
利用訓練得到的神經網絡模型對電機參數進行預測估計。為了驗證所得模型對變化轉速的跟蹤性能,進行轉速階躍工況的仿真。設置電機初始轉速為600 r/min,0.4 s時轉速階躍至1 400 r/min,0.7 s時階躍至1 000 r/min。
轉速階躍工況的仿真結果如圖4所示。可以看出,網絡模型能夠很好地跟蹤轉速變化,盡管在轉速階躍變化時會產生相應的超調量,但能快速到達目標值。轉速跟蹤的誤差如圖5所示。可以看出,模型估計值在短暫震蕩后恢復穩態,建立時間小于0.04 s,穩態誤差小于0.6 r/min。
為了驗證所得模型對負載變化的應對能力,進行了負載階躍工況的仿真。設置電機初始負載為2 N·m,0.4 s時轉速階躍至10 N·m,0.7 s時階躍至6 N·m。
負載階躍工況的仿真結果如圖6所示。可以看出,電機轉速隨著負載的增大而減小,隨著負載的減小而增大,網絡模型都能快速響應負載變化,穩定估計轉速。負載變化時的速度估計誤差如圖7所示。可以看出,啟動階段最大超調量約為1 r/min,運行階段負載變化時最大誤差為0.1 r/min,證明了模型的穩定性和準確性。
圖8為利用估計轉速進一步得到的負載估計。結果表明,負載估計直接受到電機轉速的影響,會由于轉速突變而產生相應的階躍變化,但能在極短時間內恢復穩定,得到準確的估計值。由此證明本模型具有良好的響應速度和估計精度,同時具有良好的泛用性。
4? 結? 語
針對采用靜態框架的傳統神經網絡難以準確描述感應電機這類多變量、非線性、強耦合系統動態性能的問題,本文引入NARX神經網絡模型,通過優化網絡的輸入參數簡化網絡結構,利用BAS算法優化神經網絡的訓練權值,加快網絡收斂。結果表明,本文方法能夠以較簡單的網絡模型、較少的訓練次數和較短的訓練時間,得到高效、動態、準確、穩定的預測模型,實現對感應電機的參數估計。
參考文獻
[1] 雷楊,谷立臣,劉沛津.電力拖動設備三相電信號實時監測系統開發[J].機械科學與技術,2013,32(8):1149?1152.
[2] 王晨輝,郭英軍,仝浩,等.基于ARM和Linux的嵌入式異步電機監測系統[J].儀表技術與傳感器,2011(11):68?70.
[3] PATIL R R, DATE T N, KUSHARE B E. ZigBee based parameters monitoring system for induction motor [C]// 2014 IEEE Students′ Conference on Electrical, Electronics and Computer Science. Bhopal: IEEE, 2014: 1?6.
[4] 劉朝華,李小花,張紅強,等.基于并行動態學習型免疫算法的永磁同步電機狀態監測[J].自動化學報,2015,41(7):1283?1294.
[5] AHN H J, LEE D M. A new bumpless rotor?flux position estimation scheme for vector?controlled washing machine [J]. IEEE transactions on industrial informatics, 2016, 12(2): 466?473.
[6] YIN Z G, ZHAO C, ZHONG Y R, et al. Research on robust performance of speed?sensorless vector control for the induction motor using an interfacing multiple?model extended Kalman filter [J]. IEEE transactions on power electronics, 2014, 29(6): 3011?3019.
[7] ZBEDE Y B, GADOUE S M, ATKINSON D J. Model predictive MRAS estimator for sensorless induction motor drives [J]. IEEE transactions on industrial electronics, 2016, 63(6): 3511?3521.
[8] 劉云飛,李兵,姚明林.基于PSO優化的模糊神經網絡的直接轉矩控制[J].現代電子技術,2018,41(19):117?120.
[9] ISMEAL G A, KYSLAN K, FED?K V. DC motor identification based on recurrent neural networks [C]// Proceedings of the 16th International Conference on Mechatronics?Mechatronika. Brno: IEEE, 2014: 701?705.
[10] ZHU Z, ZHANG Z, MAN W, et al. A new beetle antennae search algorithm for multi?objective energy management in microgrid [C]// 2018 13th IEEE Conference on Industrial Electronics and Applications. Wuhan: IEEE, 2018: 1599?1603.
[11] 顧海勤,楊奕,張蔚,等.[αβ]?[dq]?0坐標系下高壓電機起動特性的分析[J].現代電子技術,2018,41(17):116?118.
[12] MOHAMAD M S A, YASSIN I M, ZABIDI A, et al. Compa?rison between PSO and OLS for NARX parameter estimation of a DC motor [C]// 2013 IEEE Symposium on Industrial Electronics and Applications. Kuching: IEEE, 2013: 27?32.
[13] 邵良杉,韓瑞達.基于天牛須搜索的花朵授粉算法[J].計算機工程與應用,2018,54(18):188?194.
[14] 李琳,張棟棟,沙林秀,等.基于粒子群算法的鉆進參數多目標優化[J].現代電子技術,2014,37(10):24?27.
