混合模型的運動目標檢測與跟蹤算法
2020-08-04 12:27:53郎曉彤
現代電子技術 2020年3期
郎曉彤

摘? 要: 針對運動目標檢測與跟蹤算法計算準確率低、效果差的問題,結合Kalman濾波算法,提出一種基于高斯混合模型的運動目標檢測與跟蹤算法。對傳統的權重更新機制進行改進,以保證背景的持續更新狀態。建立高斯混合模型,對運動目標圖像進行處理,對圖像中的參數信息進行實時更新,在Kalman濾波器的性質影響下進行目標跟蹤,將獲取的運動目標位置作為信息輸入,完成運行并跟蹤。在更新的過程中,根據運動目標的狀態確定矩陣,目標遮擋也不會影響追蹤的效果。結果表明,利用Kalman濾波器對運動目標進行跟蹤,可以取得良好的運動目標跟蹤效果。
關鍵詞: 高斯混合模型; 運動目標檢測; 跟蹤算法; 權重更新; 目標遮擋; 運動目標跟蹤
中圖分類號: TN911.1?34? ? ? ? ? ? ? ? ? ? ? ? ? 文獻標識碼: A? ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)03?0070?04
Moving object detection and tracking algorithm based on mixture model
LANG Xiaotong
(Zunyi Normal University, Zunyi 563000, China)
Abstract: In combination with Kalman filtering algorithm, a moving object detection and tracking algorithm based on Gaussian mixture model is proposed to deal with the deficiencies of low accuracy and poor effect in conventional moving object detection and tracking algorithm, and improve the traditional weight updating mechanism to ensure continuous updating status of the background. The Gaussian mixture model is created to process the moving object image, update in real time the parameter information in the image and track the object with the performance influence of Kalman filter. The acquired moving object position is taken as information input to complete the operation and tracking. In the process of updating, matrix is determined according to the status of the moving object. In the case of the object occlusion, the tracking effect will not be affected. The results show that the Kalman filter can achieve good tracking effect of moving objects.
Keywords: Gaussian mixture model; moving object detection; tracking algorithm; weight updating; object occlusion; moving object tracking
0? 引? 言
在信息化的時代背景下,各種新興技術迅速發展,通過視覺感官的方式獲取外界信息成為了一種新的趨勢。在人們的生活中,到處都有視頻監控,各個領域對視頻監控都投入了大量的財力。人眼長時間觀看視頻難免會存在疏漏。因此,亟需一種穩定可靠的智能控制技術解決這種疏漏問題。在智能化的發展基礎上,采用無人監管模式,對監控中的圖像進行自動分析與處理,發現異常后及時觸發警報。在視頻圖像處理技術中,運動目標檢測與跟蹤技術起著關鍵性作用,在智能監控系統中有著極高的影響[1]。運動目標檢測可以準確地將運動物體從背景圖像中進行分離,從而確定目標的具體位置所在;運動目標跟蹤則是將檢測到的參數信息傳遞到相應模塊中,由相應的技術對這些參數進行分析、處理與統計。運動目標檢測與跟蹤是智能監控系統的技術,其算法計算更是影響到系統的精確性。現實情況是運動目標檢測與跟蹤容易受到周圍環境因素的影響,如復雜背景、光照突變場景、遮擋、陰影等,在比較復雜的場景下,對運動目標檢測與跟蹤算法的要求更高,顯然現有的算法還無法適應于所有的情形中。高斯混合模型對復雜環境有較好的適應能力,基于此,本文設計一款基于高斯混合模型的運動目標檢測與跟蹤算法,以彌補現有算法中存在的缺陷。
1? 高斯混合模型相關理論
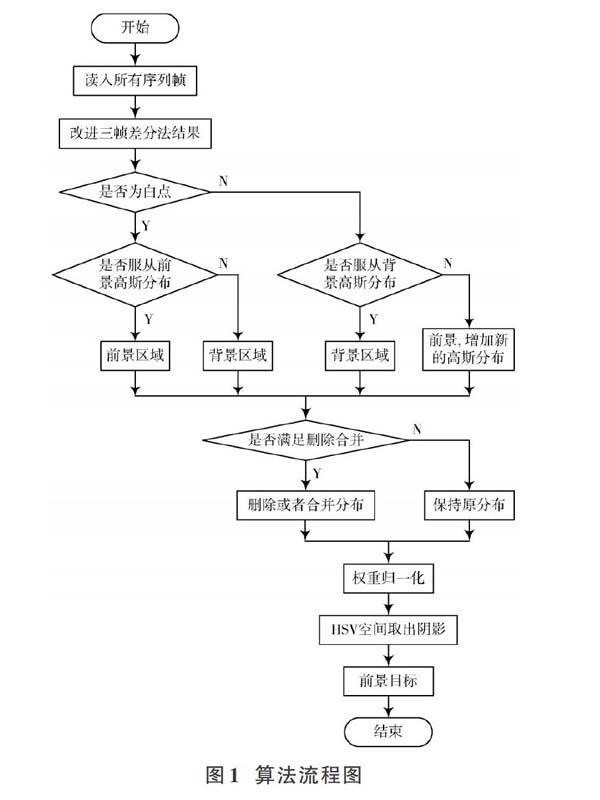
運動目標檢測在視頻監控領域中是一種非常關鍵的技術,被廣泛應用在各個領域的監控中。現有的算法在檢測過程中容易受到外界因素的干擾,影響最終的檢測結果。針對存在準確性較差的問題,很多專家學者相繼提出了多種算法來解決這種問題,如幀間差分法、光流法、背景差分法[2],雖然這些算法都有各自的特色,但是會受到光照原因的影響,進而影響結果判斷的準確性。對此,本文提出了一種基于高斯混合模型的運動目標檢測與跟蹤算法,該算法解決了傳統算法中存在的光照突變敏感的問題,利用高斯模型的個數調整場景,提高了場景自身的適應性能力。算法流程如圖1所示。
1.1? 運動區域提取
在傳統的高斯混合建模中,像素是一個個單獨存在的個體,雖然能夠在一定程度上保證每幀圖像及時更新,但是無法保證其穩定性。為此,可以先進行運動區域提取[3],再進行分塊處理,這樣的方式可以大大提高處理效率。以往的差分法算法簡單,可以快速檢測到運動區域,閾值決定了幀間差分法的性能,因此,閾值的選擇非常關鍵,過高或過低的閾值都會影響性能。因此,融合Canny檢測算法,可以有效解決差分法中邊緣不連續的問題。
假設[T=3σ+μ1,Δz1,Δz2]是動態閾值,可以表示為:
式中:[M×N]表示像素點個數;[ξ]表示抑制系數。
用Canny算法對幀進行提取,可以得到邊緣圖像[Bi(x,y)],通過對邊緣進行處理可以得到更好的圖像效果。將[Bi(x,y)]與差分圖像聯合運算[4],可以得到:
利用改進后的三幀差分法所得到的運動區域也會存在一些漏洞,因此需要對其進行形態學運算,以獲取完整的運動區域。差分法所檢測到的運動目標區域受限,接下來采用高斯混合建模的方法對前景區域和背景區域進行建模[5]。
1.2? 高斯混合模型
高斯混合模型需要對圖像中的每一個像素點進行建模,可以表示為:
式中:[K]表示模型個數;[ωi,t]表示權重;[μi,t]表示均值;[?i,t]表示協方差矩陣。
高斯混合模型建模步驟如下:
1) 模型初始化:將第一幀作為初始化的背景圖像。
2) 模型的參數更新:將當前幀的像素點與多個高斯點進行比較。如果像素點無法與高斯分布同時存在,則像素點的[μi,t],[?i,t]背景值會受到影響。
3) 背景提取與前景檢測:按照優先級的排列方式對高斯分布進行排序。按照式(4)進行判斷:
式中[T]表示閾值。
1.3? 改進的背景建模方法
在現有的高斯混合模型中,所包含的像素點個數都是固定不變的,而在實際的運動目標檢測中,像素值千變萬化,因此現有的高斯混合模型無法適用于對場景的切換。為了增加高斯分布的合理性,需要按照下列方式產生高斯分布[6]:
式中:[β]表示平衡系數,[0<β<1]。當[k]值最大時,需要將權重最小的高斯分布進行刪除。
當圖像中的像素點逐漸穩定后,可以排除優先級的排序,刪除高斯分布、合并分布,留下最優的高斯分布圖像,以更好地適應更多的場景變化。
2? 基于改進的高斯混合模型運動目標檢測與跟蹤算法研究
本研究整個過程分為檢測部分與跟蹤部分。檢測部分獲取運動目標參數,輸入到Kalman濾波器中并運行,其算法流程如圖2所示[7]。
2.1? 運動目標檢測
2.1.1? 高斯模型的初始化與更新
將第一幀圖像作為高斯模型中的均值[μ1],在更新時,對存在的高斯分布按照優先級的方式進行大小排列,匹配當前幀像素值與高斯分布,匹配方式為:
如果已經存在匹配好的高斯分布,需要按照式(9)的方式進行:
式中[α]表示學習率。
高斯分布在排列時,權重決定了背景,則背景模型可以表示為:
式中[T]表示權重比例。
2.1.2? 改進的權重更新機制
當物體進入場景后會發生停滯,在視頻幀中作為背景,當背景中的物體開始運動后,物體會將遮擋的部分作為背景進行展示[8]。在高斯混合模型中,利用式(9)表示不同的場景狀態。[α]為固定值不變,則權重更新的速率也不會發生任何變化。為了使場景中的物體可以變成背景,需要一種新的更新機制。當檢測到的物體目標靜止時,需要采取更新手段,以達到快速生成背景圖像的目的。具體的操作方式為:當像素點與高斯分布發生匹配時,像素點會進入到一個相對穩定的狀態,按照式(9)進行權重更新。權重更新的過程可以采用以下方式進行:
式中:[Δt]表示時間差值;[αs<1]。
2.2? 運動目標跟蹤
2.2.1? 改進的Kalman濾波預測算法
Kalman濾波在1961年被提出,包括更新與預測兩個階段。在預測階段,可以采用Kalman濾波器方程計算出目標狀態的最佳值,并對得到的參數進行預估。在更新的過程中,可以將預測階段所獲取的最優估計值采用預測值進行修改,利用協方差矩陣的方式衡量估計值的準確性,以判斷運動模型的目標值與實際值之間的匹配結果。
Kalman濾波的工作原理為:使用動態系統進行依次預測,以得到最佳的狀態值,其表達方程為:
式(12)分別表示Kalman濾波的狀態方程與觀測方程。其中,[X(k)]表示系統狀態;[A]表示轉移矩陣;[U(k)]表示確定性輸入;[B]表示控制矩陣;[Z(k)],[W(k)],[V(k)]表示狀態觀測值、過程噪聲、測量噪聲;[H]為觀測矩陣。
觀測矩陣表示為:
狀態轉移矩陣表示為:
式中[Δt]表示間隔時間。
觀測噪聲協方差表示為:
在實際的場景中目標之間會出現遮擋問題,影響觀測值判斷的準確性,如果矩陣[R]不變, 會使得跟蹤的數據不準確。因此,為了提高跟蹤的準確性,提出了一種基于矩陣的自由選擇算法解決這種問題。
2.2.2? 運動目標跟蹤過程
為了更精確地表達運動目標,需要結合物體本身的一些特有信息作為跟蹤背景,如顏色、運動方式等。顏色作為一種跟蹤依據,不會隨著場景的改變而發生改變,因此,可以將顏色作為跟蹤的條件,求取RGB顏色直方圖,其計算方式為:
式中[(x,y)]表示位置。當物體的位置與速度可以準確描述物體的運動狀態時,需要使用Kalman濾波器中的初始值進行表示,在初始的狀態下,如果[U(k)]=0,則狀態方程可以表示為:
式中:[P]表示位置向量;[V]表示速度向量。將位置向量與速度向量作為初始值輸入Kalman濾波器中,可以得到最終的運動目標。
3? 實驗驗證
3.1? 實驗配置
利用Linux操作系統,8 GB內存,Intel雙核CPU 3.2 GHz,VC 6.0++編程實現仿真實驗。為了體現出該算法的真實有效性,分別在不同的環境下進行實驗。
3.2? 實驗分析
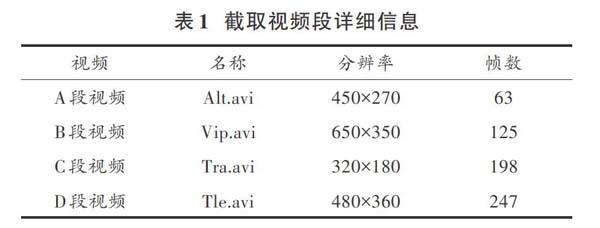
為了證明高斯混合模型的運動目標與跟蹤算法的有效性,需要對運動目標進行檢測,并全程跟蹤,對其進行仿真實驗,并與其他的方法進行比較。利用改進后的高斯混合模型背景差分法對運動目標進行檢測,為了得到更加精確的計算結果,先假設各個像素之間的像素點都是相互獨立的,需要對彩色圖像進行灰度化處理。改進后的高斯混合模型背景差分法在進行處理之前,需要先對輸入背景進行分塊處理,圖像塊為3×3,用平均值表示。最大高斯分布上限為6,初始值為[w],權值為0.3,截取不同階段的視頻信息,如表1所示。
采用幀差法、光流法和改進后的高斯混合模型進行對比,運動目標檢測時間如表2所示。
運動目標檢測效果如圖3所示。
以圖3a)原始圖像為基礎,分別對原始圖像采用幀差法、光流法、改進后的高斯混合模型進行檢測,得到改進后的高斯混合模型對于運動目標的檢測效果明顯優于幀差法與光流法。幀差法對運動目標檢測的輪廓完整,可以有效解決陰影區域的問題,但是所體現的信息丟失較為嚴重;光流法雖然很好地保留了運動目標的信息,但是由于檢測的目標范圍太大,為檢測結果增加了很多無用的信息,影響檢測結果的準確度;改進后的高斯混合模型獲取的運動目標信息完整,檢測結果更加準確。
4? 結? 語
在智能化的發展背景下,越來越離不開智能視頻監控系統所帶來的便利。在智能視頻監控系統中,運動目標檢測與跟蹤是非常關鍵的組成部分,其算法的運行性能直接關系到整個系統的運行性能。本文以運動目標檢測與跟蹤為研究背景展開討論,在高斯混合模型的基礎上進行算法改進,引入Kalman濾波算法完成運動目標跟蹤。在高斯混合模型的重要階段,改進現有的更新機制,完成背景之間的相互轉換,以保證背景圖像的同步更新。利用改進后的Kalman濾波算法完成對場景變化的自適應取值。不管目標是遮擋還是陰影,都可以完成目標的準確跟蹤,提高準確率。
參考文獻
[1] 杜鵑,吳芬芬.高斯混合模型的運動目標檢測與跟蹤算法[J].南京理工大學學報(自然科學版),2017,41(1):41?46.
[2] 高野.基于改進高斯混合模型的體育視頻運動目標檢測與跟蹤[J].現代電子技術,2017,40(19):91?93.
[3] 郅季炘.基于改進高斯混合模型的運動目標檢測與跟蹤[J].現代電子技術,2017,40(21):69?72.
[4] 沈婷婷,仲思東,鄢文浩.改進的邊緣高斯混合模型運動目標檢測[J].電光與控制,2017(4):47?49.
[5] 楊林.視頻序列中運動目標檢測與跟蹤算法研究[D].長春:長春工業大學,2017.
[6] 唐洪良,黃穎,黃淮,等.改進的自適應高斯混合模型運動目標檢測算法[J].現代電子技術,2017,40(11):73?75.
[7] 許益成,譚文安,陳麗婷.基于改進混合高斯模型的運動目標檢測算法[J].控制工程,2018,25(4):630?635.
[8] 時磊,魯華棟.基于高斯混合模型的移動目標跟蹤[J].微型電腦應用,2017(12):75?77.
