四輪獨立驅(qū)動FSEC 賽車穩(wěn)定性控制*
2020-08-04 01:00:22宋成鏢李剛
汽車工程師 2020年7期
宋成鏢 李剛
(遼寧工業(yè)大學(xué))

隨著汽車技術(shù)的不斷進(jìn)步,關(guān)于車輛穩(wěn)定性控制的研究也十分豐富[1]。在控制方法方面已經(jīng)從最初的差動制動擴展到主動前輪轉(zhuǎn)向控制、四輪轉(zhuǎn)向控制、直接橫擺力矩控制等[2]。應(yīng)用控制理論從PID 控制、最優(yōu)控制擴展到自適應(yīng)控制、模糊邏輯控制以及人工神經(jīng)網(wǎng)絡(luò)控制等[3-5]。由于大學(xué)生電動方程式賽車是近幾年興起的[6],對其穩(wěn)定性控制方面的研究較少,但是由于其在安全性方面的重要作用,已逐漸被重視。為充分利用四輪獨立驅(qū)動FSEC 賽車四輪力矩獨立可控的優(yōu)勢,文章選取直接橫擺力矩控制方式對賽車進(jìn)行穩(wěn)定性控制,配合目前最成熟,應(yīng)用最為廣泛的PID 算法,能夠最大程度地保證控制算法的實時性,提升控制效果。
1 直接橫擺力矩控制器搭建
直接橫擺力矩控制器結(jié)構(gòu),如圖1 所示。采用分層式結(jié)構(gòu),包括信號采集層、決策計算層、控制分配層和執(zhí)行機構(gòu)層。在信號采集層,模擬駕駛員操縱命令,通過PID 控制車輛的總驅(qū)動力矩,控制車速變化;決策計算層通過車速和駕駛員的轉(zhuǎn)向盤轉(zhuǎn)角輸入,計算出目標(biāo)橫擺角速度,并與實際橫擺角速度值做差,輸入PID控制器,給出附加橫擺力矩;控制分配層根據(jù)來自信號采集層的總目標(biāo)驅(qū)動力和所需的附加橫擺力矩,通過差動驅(qū)動規(guī)則對四輪驅(qū)動力進(jìn)行分配;輸出的4 個車輪的驅(qū)動力,通過執(zhí)行機構(gòu)層的四輪輪轂電機實現(xiàn)穩(wěn)定性控制。
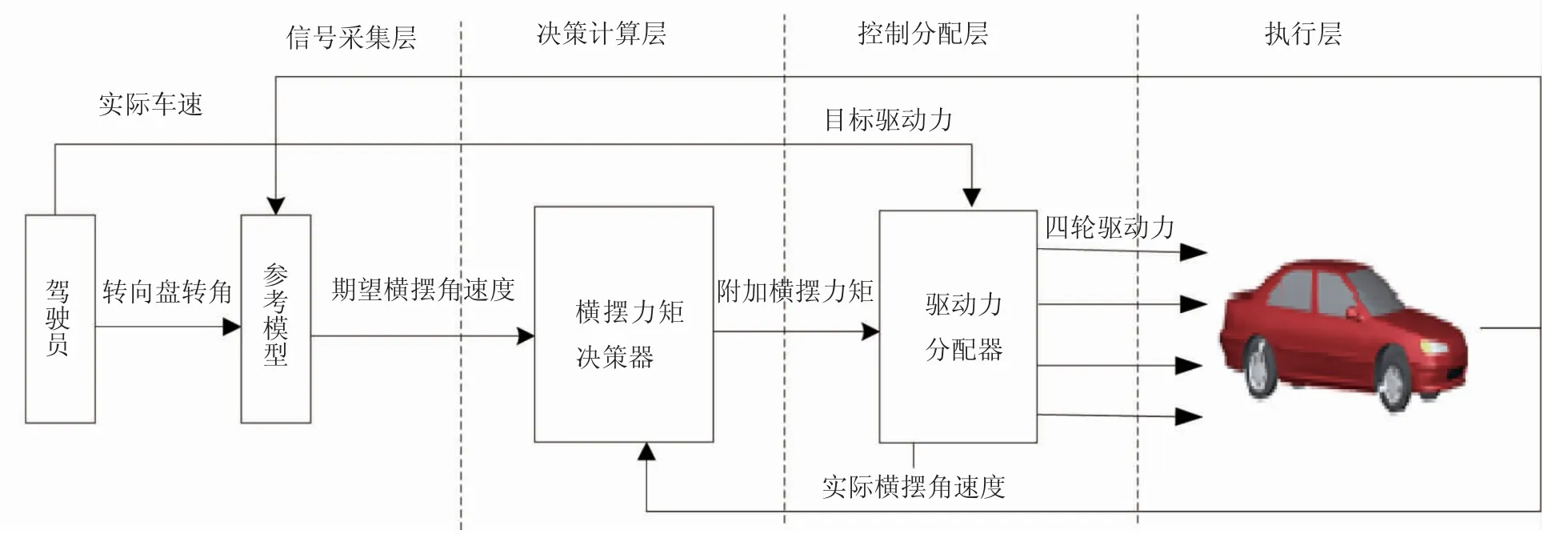
圖1 橫擺力矩控制原理圖[7-8]
1.1 參考模型
線性二自由度車輛動力學(xué)模型能夠很好地反映車輛的穩(wěn)定性參數(shù)狀態(tài),并且在運算簡便性與實時性方面具有一定優(yōu)勢[9-10],因此被眾多車輛操縱穩(wěn)定性研究選為理想模型,如圖2 所示。

圖2 線性二自由度模型
根據(jù)模型可以看出,車輛穩(wěn)定性問題可由車輛側(cè)向運動與橫擺運動表征,其微分方程為:

式中:M——汽車總質(zhì)量,kg;
V——速度,m/s;
I——車輛繞Z軸的轉(zhuǎn)動慣量,kg·m2;
Fyf——前輪的側(cè)向力,N;
Fyr——后輪的側(cè)向力,N;
β——質(zhì)心側(cè)偏角,rad;
γ——橫擺角速度,rad/s;
a,b——重心與前、后軸之間的距離,m;
βf,βr——前、后輪胎側(cè)偏角,rad。
設(shè)前后輪的側(cè)偏剛度分別為Kf和Kr,并設(shè)Fyf和Fyr分別與前后輪的側(cè)偏角βf和βr成正比,即輪胎在線性區(qū)工作,那么輪胎側(cè)向力,如式(2)所示。
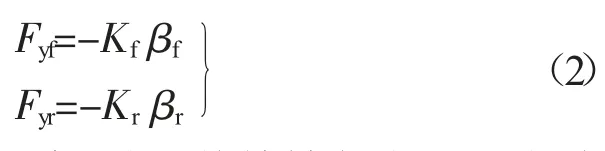
將式(2)代入式(1)中,并設(shè)前輪轉(zhuǎn)角為 δf,另外在穩(wěn)態(tài)轉(zhuǎn)向條件下,車輛質(zhì)心側(cè)偏角β、橫擺角速度γ 均不變,即可得:

通過式(3)可知,表征車輛穩(wěn)定性的參數(shù)是關(guān)于β,γ,δf,V的方程組,其中速度V與前輪轉(zhuǎn)角 δf都由駕駛員控制輸入,而質(zhì)心側(cè)偏角β 在實際車輛控制中獲取較困難,因此最后選取橫擺角速度表征車輛的穩(wěn)定狀態(tài),關(guān)系為:
式中:K——穩(wěn)定性因數(shù),s2/m2。
1.2 橫擺力矩決策控制器
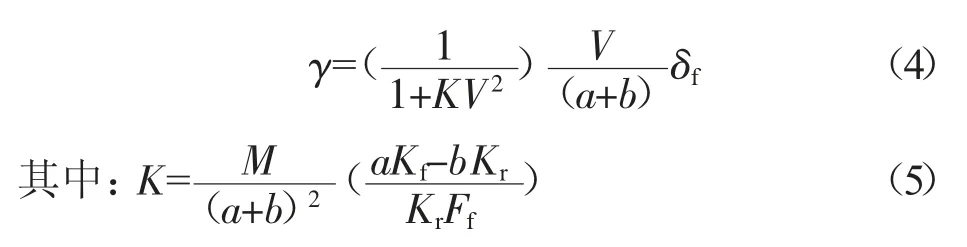
通過上述對參考模型的分析可知,車輛的穩(wěn)定性控制問題可用質(zhì)心側(cè)偏角與橫擺角速度表征,但是實際車輛控制中質(zhì)心側(cè)偏角獲取比較困難。另外,質(zhì)心側(cè)偏角不超過一定范圍時,橫擺角速度完全能夠反映車輛的穩(wěn)定性狀態(tài)。因此文章選取橫擺角速度為控制目標(biāo)量。控制原理,如圖3 所示。
圖3 橫擺力矩決策算法原理圖
定義實際與理想橫擺角速度偏差為:

所需附加橫擺力矩為:

式中:e(t)——橫擺角速度偏差,rad/s;
γ*——目標(biāo)橫擺角速度,rad/s;
γ——實際橫擺角速度,rad/s;
ΔM——附加橫擺力矩,N·m;
Kp,Ki,Kd——比例系數(shù)、積分系數(shù)、微分系數(shù)。
1.3 驅(qū)動力分配器
4 個車輪驅(qū)動力矩可通過各輪驅(qū)動電機的轉(zhuǎn)矩?fù)Q算得到:

式中:Fxi——某車輪驅(qū)動力,N;
Txi——某輪驅(qū)動力矩,N·m;
R——車輪滾動半徑,m。
當(dāng)車輛直線行駛時,四輪驅(qū)動力相等。當(dāng)車輛轉(zhuǎn)彎時,根據(jù)決策出的附加橫擺力矩符號對車輛狀態(tài)進(jìn)行判斷:當(dāng)附加橫擺力矩大于0 時,認(rèn)為車輛需要逆時針的附加橫擺力矩,此時應(yīng)適當(dāng)增大右側(cè)車輪驅(qū)動力,減小左側(cè)車輪驅(qū)動力;當(dāng)附加橫擺力矩小于0 時,認(rèn)為車輛需要順時針的附加橫擺力矩,此時應(yīng)適當(dāng)增大左側(cè)車輪驅(qū)動力,減小右側(cè)車輪驅(qū)動力,具體的分配規(guī)則為:
當(dāng) ΔM=0 時:

當(dāng) ΔM>0 時:

當(dāng) ΔM<0 時:
式中:Ff1,F(xiàn)f2,F(xiàn)r1,F(xiàn)r2——汽車左前輪、右前輪、左后輪、右后輪的驅(qū)動力,N;
B——輪距,m;
FTarget——油門請求驅(qū)動力,N。
2 仿真試驗驗證
2.1 CarSim 車輛模型建立
基于車輛動力學(xué)仿真軟件CarSim 中的方程式賽車模型進(jìn)行仿真試驗,更新賽車參數(shù)并將傳動系統(tǒng)與發(fā)動機系統(tǒng)用Simulink 模型代替,主要參數(shù)如表1 所示。

表1 基于CarSim 軟件進(jìn)行仿真試驗的賽車參數(shù)情況
2.2 仿真試驗
CarSim 與Simulink 聯(lián)合仿真試驗選取2 個典型的試驗場景,分別是快速移線仿真試驗與蛇形保持仿真試驗。
2.2.1 快速移線仿真試驗
車輛速度為70 km/h、高附著系數(shù)路面、閉環(huán)雙移線轉(zhuǎn)向控制,在70 m 時實施變道動作,向左移動3.5 m,隨后變更回原來車道。試驗結(jié)果,如圖4 和圖5 所示。

圖4 快速移線仿真試驗橫擺角速度曲線

圖5 快速移線仿真試驗驅(qū)動力矩曲線
從橫擺角速度仿真結(jié)果中可以看出,施加控制車輛可以較好地跟蹤目標(biāo)橫擺角速度。從驅(qū)動力分配曲線可以看出,施加控制后車輛的左右側(cè)車輪轉(zhuǎn)矩差異明顯,控制效果顯著。
2.2.2 正弦保持仿真試驗
車輛初始速度為80 km/h、高附著路面、閉環(huán)正弦轉(zhuǎn)向輸入,幅值1.5 m,每隔30 m 設(shè)置1 個樁桶作為參考標(biāo)識。試驗結(jié)果,如圖6 和圖7 所示。

圖6 正弦保持仿真試驗橫擺角速度曲線
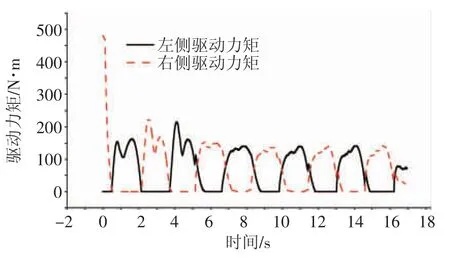
圖7 正弦保持仿真試驗驅(qū)動力矩曲線
從橫擺角速度仿真結(jié)果可以看出,在頻繁的轉(zhuǎn)向輸入下車輛已經(jīng)不能很好地跟蹤目標(biāo)橫擺角速度,但是相對于無控制車輛,施加控制的車輛依然能夠在響應(yīng)速度與跟蹤幅度上占有一定優(yōu)勢。從驅(qū)動力分配曲線圖可以看出,施加控制后,車輛的左右側(cè)車輪轉(zhuǎn)矩變化十分均勻,控制效果穩(wěn)定。
3 結(jié)論
文章利用四輪驅(qū)動電動方程式賽車驅(qū)動力矩獨立可控的優(yōu)勢,基于PID 控制理論設(shè)計直接橫擺力矩穩(wěn)定性控制算法,對驅(qū)動力進(jìn)行合理分配,能夠有效提升車輛操縱穩(wěn)定性。選取雙移線與正弦保持試驗工況對算法進(jìn)行仿真試驗,結(jié)果表明施加控制的車輛能夠較好地跟蹤目標(biāo)橫擺角速度,實現(xiàn)車輛的良好控制。文章提出算法是建立在參考模型線性區(qū)間的,下一階段應(yīng)將非線性因素加入進(jìn)來,建立更加完善的穩(wěn)定性控制算法。
