煤礦主提升機(jī)制動(dòng)控制系統(tǒng)的研究
2020-07-31 17:50:30張杰勛
機(jī)械管理開發(fā) 2020年6期
張杰勛
(晉煤集團(tuán)長(zhǎng)平公司機(jī)電工區(qū), 山西 晉城 048411)
引言
提升機(jī)是用于聯(lián)系地面和井下的通道,主要負(fù)責(zé)物料和人員的運(yùn)輸,是礦山核心設(shè)備之一,對(duì)確保煤礦運(yùn)輸安全具有十分重要的意義。礦井提升機(jī)在工作過程中主要采用恒壓力制動(dòng)的方式進(jìn)行制動(dòng)控制,但在特殊工況或者緊急制動(dòng)的情況下,目前的控制方案存在著制動(dòng)及時(shí)性差、速度慢的缺陷,給提升作業(yè)安全造成了一定的隱患,而且由于采用了開環(huán)控制模式、制動(dòng)力矩恒定,無法根據(jù)運(yùn)輸工況進(jìn)行靈活的調(diào)整,隨著礦井提升作業(yè)向著高速、重載方向的發(fā)展,目前控制方案下提升機(jī)在運(yùn)行過程中的震動(dòng)、沖擊現(xiàn)象越發(fā)嚴(yán)重,給煤礦的運(yùn)輸安全造成了嚴(yán)重的影響[1]。因此本文利用仿真分析系統(tǒng)對(duì)鋼絲繩提升機(jī)的恒減速制動(dòng)特性進(jìn)行研究。
1 基于閉環(huán)控制的恒減速制動(dòng)原理
提升機(jī)的恒減速制動(dòng)系統(tǒng)的整體結(jié)構(gòu)如圖1 所示,該控制系統(tǒng)采用了雙回路制動(dòng)控制模式[2],能夠有效提升子系統(tǒng)的制動(dòng)安全性,同時(shí)在該制動(dòng)系統(tǒng)中引入了閉環(huán)控制的邏輯,利用測(cè)速傳感器實(shí)現(xiàn)對(duì)提升機(jī)提升滾筒運(yùn)行速度的連續(xù)性監(jiān)測(cè),將監(jiān)測(cè)結(jié)果實(shí)時(shí)傳遞到制動(dòng)調(diào)節(jié)控制器內(nèi),從而實(shí)現(xiàn)對(duì)提升機(jī)提升速度的連續(xù)性閉環(huán)控制。為了滿足在正常制動(dòng)和緊急制動(dòng)情況下的恒減速制動(dòng)控制,建立了制動(dòng)壓力傳感器和液壓控制系統(tǒng)的電磁比例溢流閥之間的閉環(huán)調(diào)控邏輯[3],根據(jù)不同的控制需求實(shí)現(xiàn)對(duì)電磁比例溢流閥調(diào)整電磁信號(hào)的控制,滿足對(duì)制動(dòng)壓力的調(diào)整,同時(shí)根據(jù)制動(dòng)減速情況進(jìn)一步地對(duì)電磁比例溢流閥的電磁控制信號(hào)進(jìn)行反饋控制調(diào)整,實(shí)現(xiàn)恒減速制動(dòng)控制,有效降低在制動(dòng)過程中的穩(wěn)定性,減少對(duì)提升機(jī)系統(tǒng)的沖擊。

圖1 基于閉環(huán)控制的恒減速制動(dòng)原理
2 鋼絲繩提升機(jī)仿真分析模型的建立
鋼絲繩作為提升機(jī)的關(guān)鍵零件,其特性對(duì)礦井提升機(jī)的運(yùn)行穩(wěn)定性具有較大的影響,傳統(tǒng)對(duì)鋼絲繩的建模均采用了鋼體建模方案,與實(shí)際差異性較大,為實(shí)現(xiàn)對(duì)提升機(jī)制動(dòng)控制系統(tǒng)的有效控制,本文提出了一種新的開爾文鋼絲繩建模方案,其結(jié)構(gòu)模型如下頁(yè)圖2 所示[4]。
由圖2 可知,該結(jié)構(gòu)模型主要包括彈性元件和黏性元件構(gòu)成,在外部提升平臺(tái)重量M的作用下,彈性元件k和黏性元件b的應(yīng)變一致,此情況下元件的總應(yīng)力為彈性元件和黏性元件的應(yīng)力和,可表示為[5]:

根據(jù)胡可定律可知:

圖2 開爾文模型結(jié)構(gòu)示意圖
式中:ε 為鋼絲繩應(yīng)變量;εH為彈性元件應(yīng)變量;εN為阻尼器的應(yīng)變量;σ 為鋼絲繩應(yīng)力;σH為彈性元件應(yīng)力;σN為阻尼器應(yīng)力;k為彈性元件的剛度系數(shù);b為黏性元件的阻尼系數(shù)。
通過對(duì)上式聯(lián)合建立提升本構(gòu)方程并求解,可獲得鋼絲繩在運(yùn)動(dòng)過程中的動(dòng)力學(xué)方程為:
3 基于模糊PID 控制的制動(dòng)特效仿真
利用SimulationX 仿真分析軟件建立提升機(jī)提升控制系統(tǒng)的仿真分析模型,將鋼絲繩在運(yùn)動(dòng)過程中的動(dòng)力學(xué)方程帶入到該仿真分析邏輯控制編輯器內(nèi),對(duì)鋼絲繩在不同工況下的制動(dòng)情況進(jìn)行仿真分析,結(jié)果如圖3 所示,圖中速度1 表示采用模糊PID控制邏輯,速度2 表示采用傳統(tǒng)的恒壓力制動(dòng)控制模式。
由圖3 可知,該工況為提升機(jī)制動(dòng)時(shí)的速度為10 m/s,負(fù)載重量為5 000 kg,制動(dòng)時(shí)的制動(dòng)減速度為1.25 m/s2,由仿真分析結(jié)果可知,當(dāng)采用傳統(tǒng)控制方案時(shí),在制動(dòng)瞬間速度出現(xiàn)了極大的波動(dòng),會(huì)使制動(dòng)系統(tǒng)產(chǎn)生較大的沖擊。當(dāng)采用優(yōu)化后的模糊PID控制時(shí),制動(dòng)時(shí)速度基本上無波動(dòng),能夠有效提升提升機(jī)在制動(dòng)過程中的穩(wěn)定性和可靠性,增強(qiáng)提升機(jī)的使用壽命。
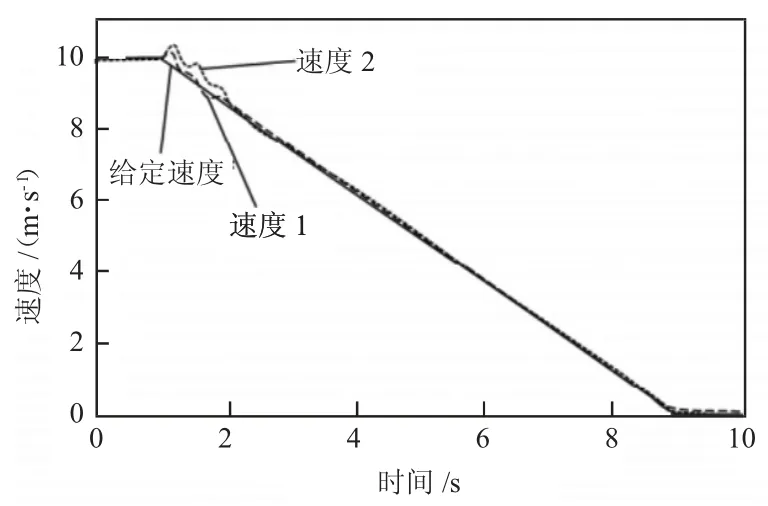
圖3 不同控制特效下的制動(dòng)性能曲線
4 結(jié)論
1)該控制系統(tǒng)采用了雙回路制動(dòng)控制模式,在該制動(dòng)系統(tǒng)中引入了閉環(huán)控制的邏輯,利用測(cè)速傳感器實(shí)現(xiàn)對(duì)提升機(jī)提升滾筒運(yùn)行速度的連續(xù)性監(jiān)測(cè);
2)利用開爾文鋼絲繩建模方案,建立鋼絲繩運(yùn)動(dòng)時(shí)的動(dòng)態(tài)模型,能夠有效提升仿真分析結(jié)果的準(zhǔn)確性;
3)用優(yōu)化后的模糊PID 控制時(shí),制動(dòng)時(shí)速度基本上無波動(dòng),能夠有效提升在制動(dòng)過程中的穩(wěn)定性和可靠性,增強(qiáng)提升機(jī)的使用壽命。