運輸履帶式消防機器人裝備車
2020-07-31 22:36:36徐鵬1張韻2
專用汽車 2020年7期
關鍵詞:質量
徐鵬1 張韻2
1.唐山亞特專用汽車有限公司 河北唐山 063000
2.漢陽專用汽車研究所專用汽車雜志社 湖北武漢 430056
1 前言
伴隨著中國經濟發展與國內相關行業技術水平的不斷提高,新能源以及新型材料的應用逐漸普及。此類由新技術或新材料引發的火災,使得我國消防工作面臨新的挑戰。在國內,為了更好地解決此類問題,大批新型履帶式消防類排煙、偵查以及滅火機器人應運而生。相對應的,為解決機器人的中間轉運和維護問題,實現發生災情時能夠快速開展消防工作并縮短消防設備響應時間的目的,筆者研發了一種新型消防機器人運輸類專用車輛。
2 專用車結構和功能預期
此類專用車由汽車二類底盤、功能性箱體、機器人專用固定防護裝置、多功能尾門以及加強支腿等機構組成。設計中尾門加裝液壓驅動系統,經尾門下側翻轉支撐結構實現尾門翻轉開合,且尾門完全打開后可作為機器人上、下車通道。功能性箱體需滿足4臺消防機器人的運輸空間要求,同時可實現消防機器人的能源補充、消防指揮操作、災情現場夜間照明以及現場監控等系列功能。
裝備車整體外形如圖1所示。
2.1 底盤選取
首先,此類專用車主要使用群體為消防相關部門,故在底盤選擇中車輛可靠性與穩定性成為首要指標。其次,車輛二類底盤需在滿足承載要求的同時具有良好的動力性能以及路面通過性。
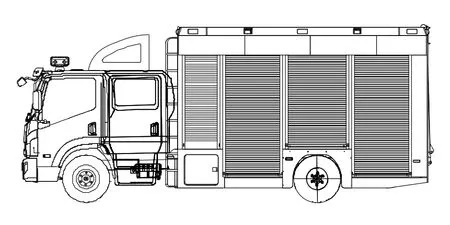
圖1 運輸履帶式消防機器人裝備車外形簡圖
綜合考慮以上要求,選擇一款車輛二類底盤,其主要性參數如表1所示。

表1 車輛二類底盤性能參數
2.2 多功能箱體設計
如圖2所示,封閉式多功能箱體主體由裙板結構組成,主體結構共分前后兩部分。箱體前部裝有附件箱,消防水袋柜、防化服放置架和發電機安裝倉;箱體后部為機器人轉運倉,內部設置有機器人定位與固定裝置。
箱體外沿下側安裝有裙邊箱體,用作車輛工具箱以及電控、液壓控制系統的安裝。根據上述功能區域劃分與對應的空間要求,多功能箱體整體尺寸(長×寬×高)設計為4 450 mm×2 450 mm×2 400 mm。箱體底板采用碳鋼骨架結構,其上鋪裝鐵質花紋板(或碳鋼骨架結構上鋪竹膠板與鋁質花紋板組合結構);箱體側板使用玻璃鋼夾心復合板材(或碳鋼骨架鋪裝鋁板)通過鉚接形式緊固組裝,多功能箱體整體結構具有剛度強,質量輕,外觀簡潔、美觀的特點。

圖2 多功能箱體示意圖
2.3 機器人專用固定與防護裝置設計
多功能箱體內機器人轉運區設置有機器人固定裝置。通過安裝于箱體內的收緊帶固定架實現消防機器人的履帶固定,最終達到固定機器人的目的。為方便人員進入箱體后部進行機器人固定操作或相關維護檢修,箱體側板安裝有卷簾門。箱體兩側安裝有踏板擋板裝置,一方面該裝置可用于人員由箱體側邊進入車廂的輔助踏板,另一方面可作為機器人防側滑機構。
2.4 尾門設計
箱體后側裝有液壓驅動式翻轉尾門,通過油缸的伸/縮實現尾門旋轉座繞固定銷軸的旋轉運動,進而實現尾門的開啟和收回。尾門設計應具足夠的剛度,滿足機器人上下車時對其支撐機構承載的要求。尾門收起后可作為多功能箱體的后門使用,為保證箱體具有一定的防雨/防水功能需要加裝配套的后門密封與防松裝置。
2.5 支腿的設計
專用車輛在實際使用中可能存在搭載更大自重的消防機器人的情況,在機器人上下車時,由于車輛裝載質心發生變化容易對車輛后橋形成一定的沖擊,為避免這一現象,車架兩側加裝液壓支腿用于支撐車輛,保證箱體底板水平度,進而提高車輛在作業中的穩定性。
3 整車結構布置
結合選定底盤與預期功能對專用車整車結構與布局進行設計。綜合考慮車輛質心位置、整車高度、行駛風阻等因素對車輛機械與外形結構進行設計。設計中加入扶梯與蹬車踏板等操作輔助裝置,提高人機融合度,簡化功能操作。
裝備車結構簡圖如圖3所示。
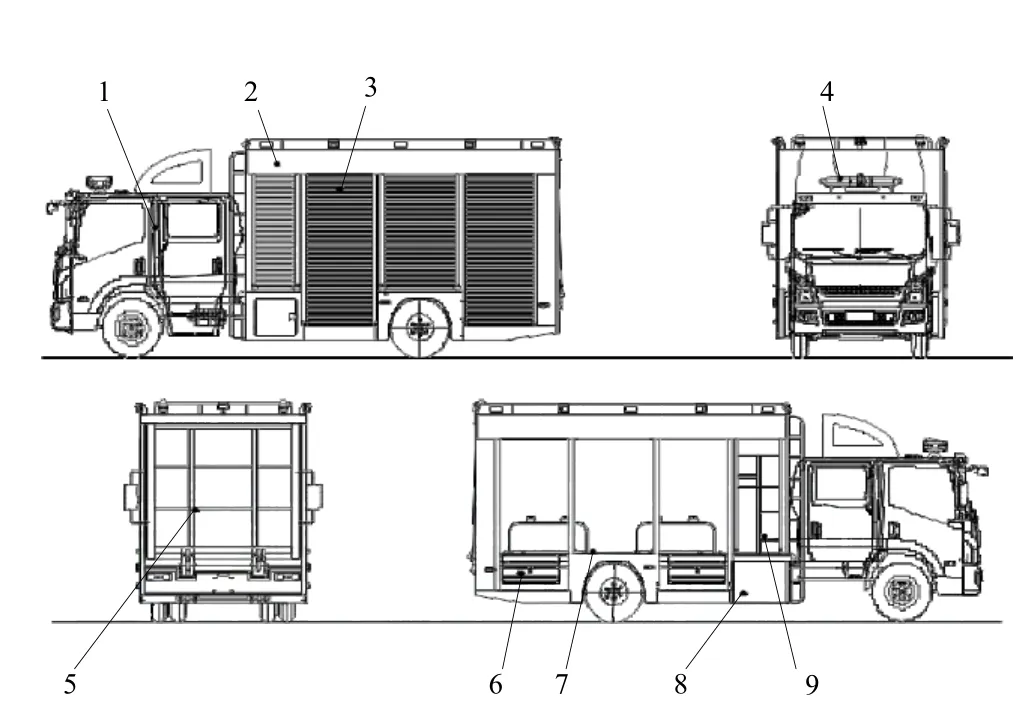
圖3 裝備車結構簡圖
根據運輸履帶式消防機器人裝備車設計及計算結果,定義裝備車整車技術參數如表2所示,實際車輛圖片如圖4所
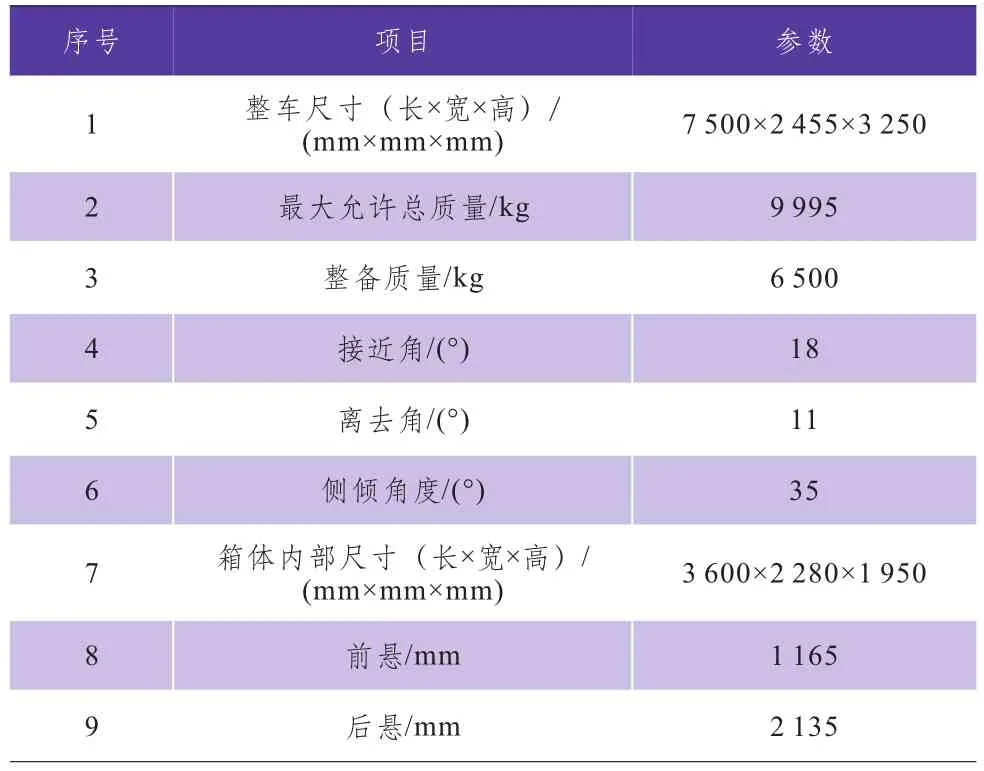
表2 裝備車整車參數
4 液壓系統設計
車輛尾門與支腿功能所需液壓控制系統原理圖如圖5所示。液壓油泵由車輛底盤變速箱取力器輸出端帶動向液壓系統提供動力,原理圖左側油路用于控制車側四條液壓支腿工作,支腿油缸油路裝有電磁截止閥與液壓鎖,用于支腿內位置鎖止。原理圖右側回路用于尾門兩個油缸的控制,管路中加裝液壓鎖,避免駐車、停車過程中尾門受重力作用打開。電控系統通過對三位四通電磁閥與電磁截止閥的控制實現對液壓系統的控制。主油泵側加裝手動泵回路,用于應對主油泵發生故障時系統的正常運行,提高系統的安全性能。

圖4 裝備車實物圖
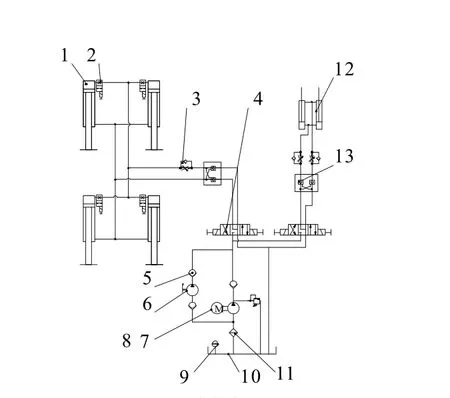
圖5 液控原理圖
5 遠程遙控的電控系統設計
為滿足專用車遠程操作以及可視化作業的需要,在液壓系統控制中加入遠程遙控控制電路。其工作原理如圖6所示。電控系統主要由油泵控制模塊,支腿控制模塊、尾門控制模塊以及遙控信號接收模塊組成。控制電路由車輛低壓電池供電(24 V),通過遙控器面板按鈕實現各功能回路的選擇,各功能模塊中分別加裝保險絲用于單獨模塊的保護,也使電控系統故障排除更為方便。支腿控制模塊與尾門控制模塊中各控制回路加入二極管實現穩壓功能,提高電子元件的使用壽命。
6 整車穩定性計算
以前橋中心點在地平面投影為坐標原點,以車尾為X軸正向,車身右側為Y軸正向,車高為Z軸正向,建立坐標系如圖7所示。
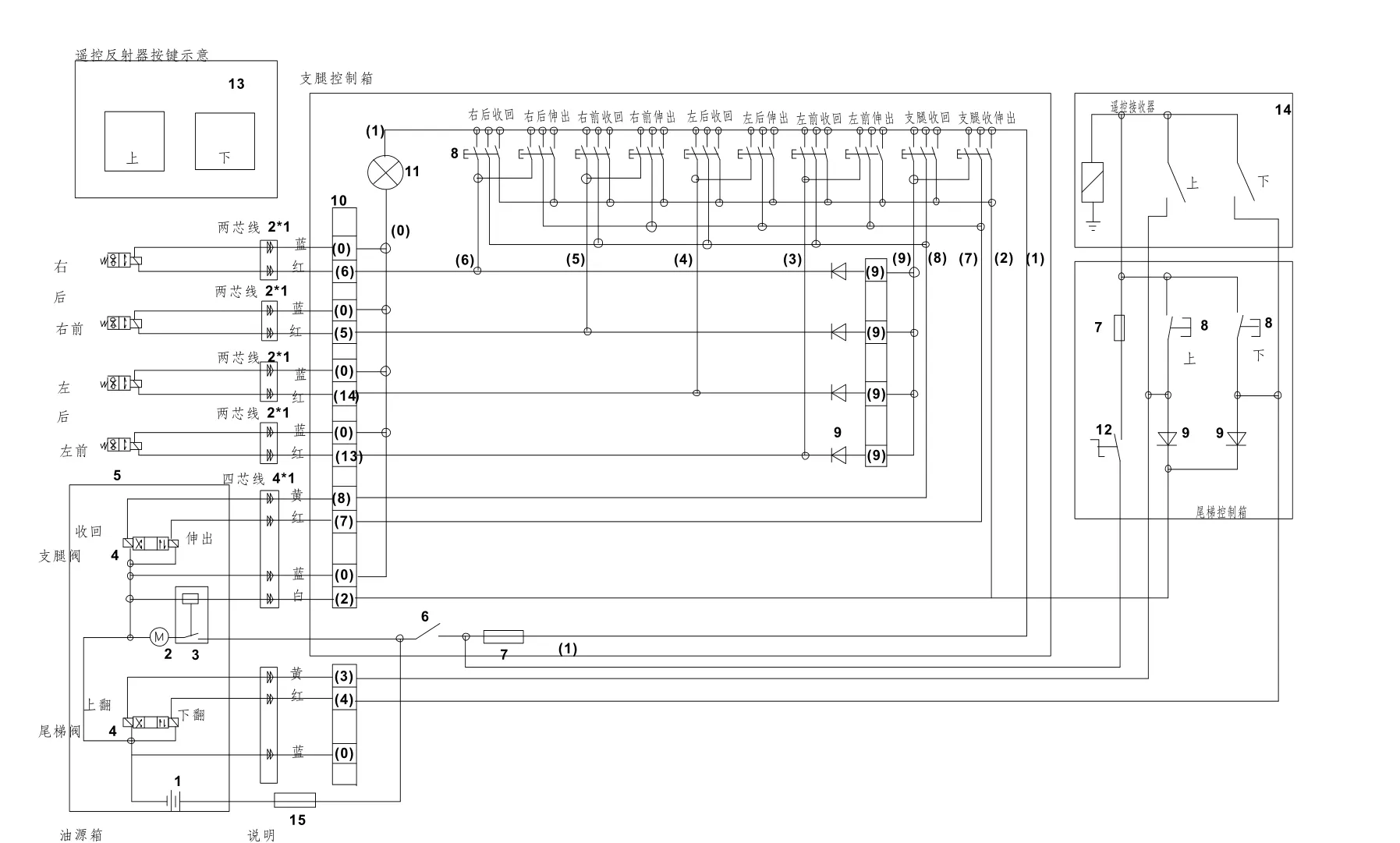
圖6 電控原理圖
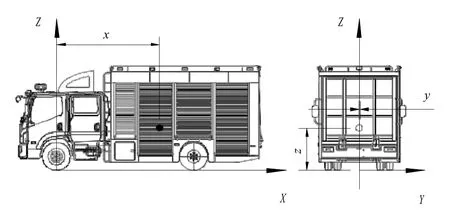
圖7 裝備車質心坐標系圖
6.1 整備質量計算
根據整備質量計算公式,計算如下:
式中,M為整備質量,kg;Mi為各部件質量,kg。
6.2 整車質心計算
整車質心計算公式如下:

式中,X、Y、Z為整車質心方向位置;Xi、Yi、Zi為各部件質心方向的位置。
6.3 整車前后橋軸荷計算公式
式中,X為整車質心距前橋距離;L為整車軸距;M前、M后分別為整車前、后橋軸荷,kg。
6.4 車輛橫向穩定性計算
車輛橫向穩定性計算公式如下:
式中,B為車輛后輪距;z為質心距地面高度;φ為地面附著系數;Ly為質心偏離中心線距離。
6.5 車輛縱向穩定性計算
車輛縱向穩定性計算公式如下:
式中,L后為整車質心到后橋距離。
6.6 計算表制作
如表3所示,在主工作表的表頭上依次設置“質量”/“X”/“Y”/“Z”項,該4項為數據輸入;再設置另3項數據輸出,即“M*X”/“M*Y”/“M*Z”。應用Excel表格的函數計算功能,可以通過前4項計算出后3項的輸出數據,后3項輸出數據的關系分別為“質量”與“X”/“Y”/“Z”這3個方向距離的乘積。另設置主工作表連接于車輛總質量、質心位置、軸荷分配的參數表(見圖8右側)此表中除軸距L即輪距B需要輸入外,其余參數均為圖2左側表輸出參數,是車輛設計中需要的幾個基本參數。
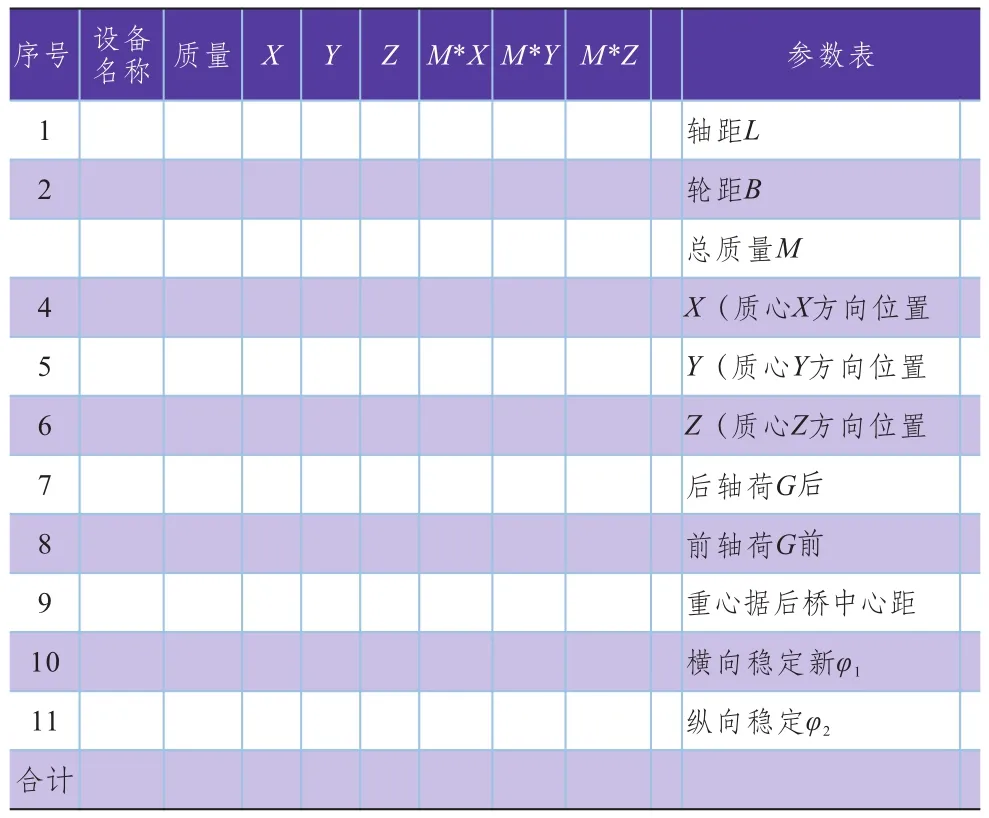
表3 車輛質心計算函數EXCEL表
應用Excel表格的函數計算功能,該輸出的數據的計算公式為:
“總質量M”=∑“質量”
“X(質心X方向位置)”=(∑“M*X”)/“總質量M”
“Y(質心Y方向位置)”=(∑“M*Y”)/“總質量M”
“Z(質心Y方向位置)”=(∑“M*Z”)/“總質量M”
“后軸載荷G后”=(“總質量M”*“X(質心X方向位置)”)/“軸距L”
“前軸載荷G前”=“總質量M”-“后軸載荷G后”
“質心距后橋中心距L后”=“軸距L”-“X(質心X方向位置)”
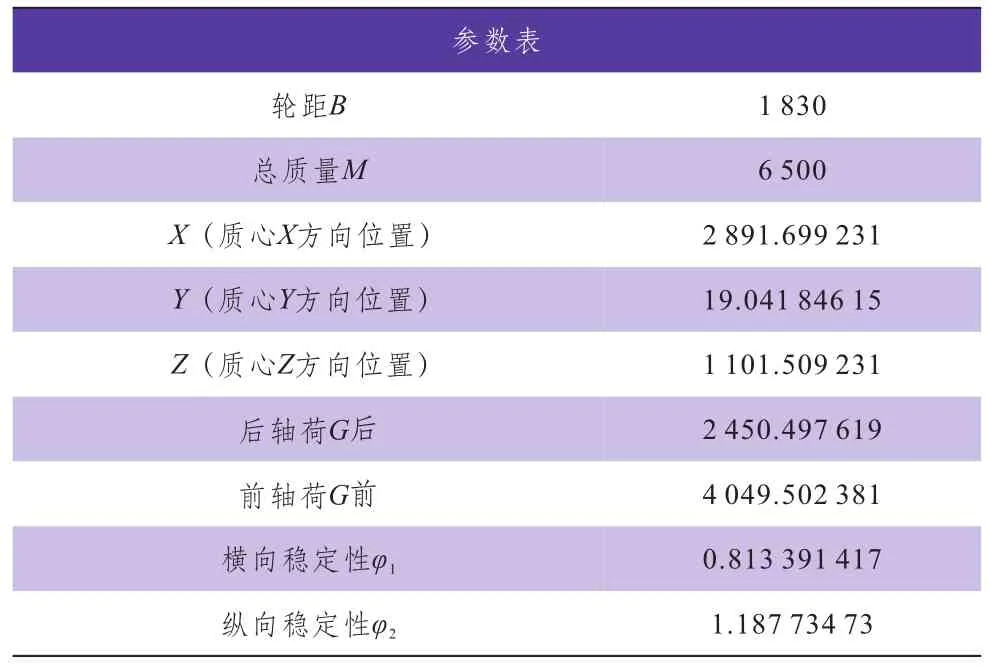
表4 裝備車(整備狀態)軸何分配與質心位置計算結果表
“橫向穩定性系數φ1”=(“輪距B”/2-“Y(質心Y方向位置)”)/ “Z(質心Z方向位置)”
“縱向穩定性系數φ2”=“質心距后橋中心距L后”/“Z(質心Z方向位置)”
當把各部件的質量、位置參數輸入到圖2的計算表內的“質量”/“X”/“Y”/“Z”列表之中,并將軸距、輪距輸入到右側參數表中的”軸距L”/“輪距B”之后,輸出結果則會立即在輸出列表中顯示。
將樣車實測參數輸入表格,顯示結果如表4、5所示。數模坐標系內各功能組件質心位置計算結果如表5。

表5 裝備車各功能組件質心位置表
根據國標GB 7258-2017《機動車運行安全技術條件》中關于車輛縱向與橫向穩定性的要求,結合表3計算結果可知裝備車整備狀態下縱向穩定性為1.19,滿足縱向穩定性不小于0.7的要求,橫向穩定性0.81,滿足橫向穩定性不小于0.5的要求,故該專用車輛設計符合要求。
7 結語
該運輸履帶式消防機器人裝備車經消防部門的列裝使用,各結構和部件性能穩定,操作便捷可靠。該類型專用車輛是消防部門和廠礦企業進行機器人運輸的得力助手,并為消防機器人滅火,消殺等作業以及相關維護提供有力保障。
該裝備車已經申報發明專利(專利號:ZL 2017 1 0192284.2)。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
