2000國家大地坐標動態轉換方法探討
2020-07-30 07:22:35黎鵬何雯羅曄
水利水電快報 2020年7期
關鍵詞:國家
黎鵬 何雯 羅曄
摘要:基于2000國家大地坐標系的定義,探討利用待測點數據與ICS站點數據進行組網解算平差后得到ITRF2008框架瞬時坐標,通過動態轉換計算出待測點的2000國家大地坐標系坐標,并通過實例驗證該方法的可行性。結果表明:該方法求取坐標精度可達3cm,符合規程規定的2000國家大地坐標GPS控制網點位坐標精度,并可提高外業觀測的靈活性和便利性。
關鍵詞:2000國家大地坐標;動態轉換;IGS;ITRF2008框架
中圖法分類號:P226.3 文獻標志碼:A DOI:10.15974/j.cnki.slsdkb.2020.07.007
1研究背景
2000國家大地坐標系(以下簡稱“CGCS2000坐標系”)是我國新一代大地坐標系,按照《國土資源部國家測繪地理信息局關于加快使用2000國家大地坐標系的通知》(國土資發[2017]30號)要求,2018年6月底前完成全系統各類國土資源空間數據向2000國家大地坐標系轉換,2018年7月1日后自然資源系統將全面使用2000國家大地坐標系。涉及到空間坐標的報部審查和備案項目,全部采用2000國家大地坐標系。2018年7月1日起不再接受非2000系上報的項目報件。由此可以預見,CGCS2000坐標在實際中的應用將會越來越廣泛。因此,在實際生產中獲取高精度CCCS2000坐標十分重要。
CCCS2000坐標系是全球地心坐標系在我國的具體體現,其定義與國際地球參考系(ITRS)的定義一致。ITRS是目前國際上最精確、最穩定的全球性地心坐標系,國際地球參考框架(ITRF)是一個地心四維坐標參考框架,是ITRS的具體實現,由一系列測站相對于某一參考歷元的坐標和位移速度構成,通過下載GPS站點觀測數據可與測量點組成同步觀測網。CCCS2000坐標系以ITRF97參考框架為基準,參考框架歷元為2000.0。在定義上,CCCS2000與WCS84是一致的,即關于坐標系原點尺度、定向及定向演變的定義都是相同的。WCS84坐標系與ITRF框架相對應,如:WGS84(G1150)對應ITRF2000,WCS84(G1674)對應ITRFO8。但因為CCCS2000坐標系的坐標定義在2000.0歷元,因此不同時間定位得到的WCGS84坐標不是嚴格意義下的CGCS2000坐標。
CCCS2000坐標的獲取是通過與國家高等級控制點聯測求取或實時動態定位等方法實現,但這些方法大多依賴國家控制點或者差分信號,在實際生產中存在一定的局限性。本文主要探討一種在沒有已知點和差分信號的情況下,將待測點與IGS站組網解算得到的高精度坐標,通過動態轉換獲取2000國家大地坐標的方法及其在實際工程應用中的可行性。
2動態轉換方法
用高精度GNSS定位軟件處理后得到的各站點坐標與觀測時刻衛星星歷定義的基準一致,衛星在不同時間段采用不同ITRF框架。據CCCS2000定義,可將測時某特定框架坐標下瞬時坐標經過動態轉換實現。步驟如下:
(1)通過待求點外業靜態測量數據與ICS站觀測數據組網進行數據處理,獲取待求點某特定框架下的瞬時坐標;由于組網基線均為長基線,為了保證結果的可靠性,一般使用GAMIT/CLOBK等軟件進行數據處理。
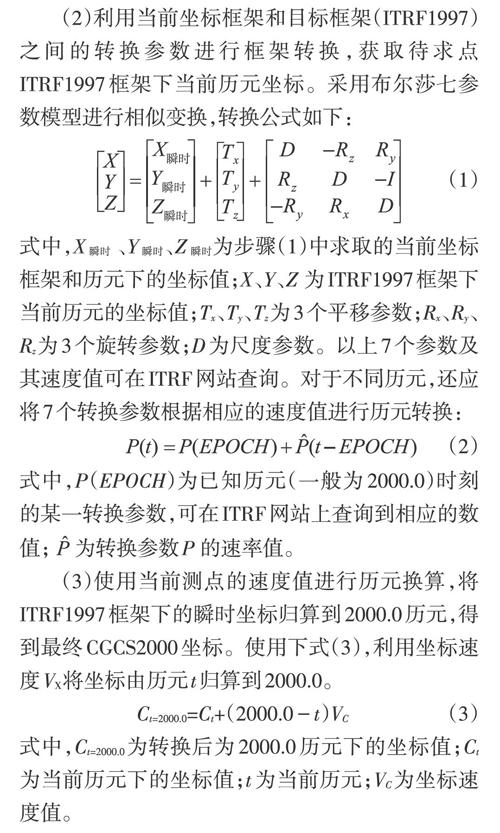
(2)利用當前坐標框架和目標框架(ITRF1997)之間的轉換參數進行框架轉換,獲取待求點ITRF1997框架下當前歷元坐標。采用布爾莎七參數模型進行相似變換,轉換公式如下:
式中,X瞬時、Y瞬時、Z瞬時為步驟(1)中求取的當前坐標框架和歷元下的坐標值;X、Y、Z為ITRF1997框架下當前歷元的坐標值;T、T,、T為3個平移參數;R、R、R為3個旋轉參數;D為尺度參數。以上7個參數及其速度值可在ITRF網站查詢。對于不同歷元,還應將7個轉換參數根據相應的速度值進行歷元轉換:
P(t)=P(EPOCH)+P(t-EPOCH)
式中,P(EPOCH)為已知歷元(一般為2000.0)時刻的某一轉換參數,可在ITRF網站上查詢到相應的數值;p為轉換參數P的速率值。
(3)使用當前測點的速度值進行歷元換算,將ITRF1997框架下的瞬時坐標歸算到2000.0歷元,得到最終CCCS2000坐標。使用下式(3),利用坐標速度k將坐標由歷元t歸算到2000.0。
式中,Cr20000為轉換后為2000.0歷元下的坐標值;C;為當前歷元下的坐標值;t為當前歷元;Vc為坐標速度值。
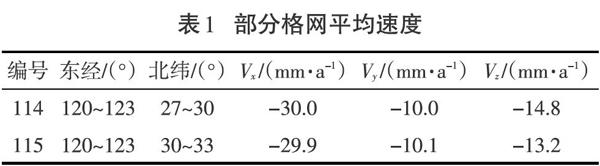
在這一過程中,獲取高精度速度值Vc是關鍵。速度值的求取方法主要有歐拉矢量法、格網平均值法、多面函數法等。目前,對于區域站精度較高的方法為局域歐拉矢量法內插速度,但需要連續站點數據以及軟件支持,使用難度較大。因此,本文推薦使用魏子卿2提出的格網平均值法,其結果已按3*x3°格網以表格形式列出,可直接查詢,使用精度相對較高,站位速度誤差統計值達到+2.61mm/ao部分格網平均速度見表1。
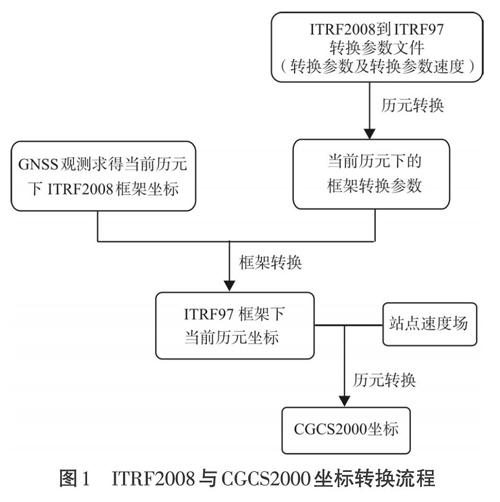
由以上分析可總結出動態轉換的一般過程,流程見圖1。
3轉換實例
本文以位于某省的3個已知點X001、X002、X003在2017年5月23日觀測數據為例,采用周邊的13個IGS測站(airabjfs、daeji、guam、hyde、iisc、kit3lhazntus、pimo、pol2、shao、urum)參與解算。計算過程中,當前歷元取觀測時段平均值為2017.393。已知坐標見表2,使用GAMIT進行基線解算,GLOBK進行網平差。
網平差后獲得的所有站點ITRF2008框架在2017.393歷元下的坐標值見表3。
將平差后的坐標根據ITRF網站查詢到的參數進行框架轉換,轉換參數見表4。此過程可實現在.2017.393歷元下將坐標由ITRF2008框架轉換至ITRF97框架。
框架轉換后得到ITRE97框架下2017.393歷元下的坐標結果,采用魏子卿!一》提供的中國大陸39x3°格網平均速度進行歷元換算,坐標轉換輸人數據見表5,轉換結果見表6。
考慮到通常使用的坐標為平面坐標,將轉換結果與已知坐標均投影到平面進行對比,結果見表7。
從轉換過程可以發現,不同坐標框架之間坐標的差值相對較小,均在厘米級,坐標轉換前后的差值主要發生在對坐標進行歷元轉換的過程中34。尤其在長時間跨度的計算中,對坐標值的影響達到了亞米級,因此站點速度值的精度就顯得尤為重要[5-6]。從計算結果可以看出,,投影后平面坐標結果精度整體優于大地高結果。根據《大地測量控制點坐標轉換技術規程》規定,2000國家大地坐標GPS控制網點位坐標精度為0.03m,轉換得出的平面坐標點位精度符合精度要求。這說明,采用此方法在一定條件下可以獲取高精度2000國家大地坐標成果。但大地高精度仍有待進一步提高,其中X001差值最大,主要原因可能是:①x001站的觀測數據質量較差、觀測歷元較短;②基線解算和網平差存在誤差;③歷元轉換中的速度精度不高,在長時間跨度的歷元轉換中,坐標絕對精度會降低。參考中國大陸I級活動塊體劃分,該區域位于魯東黃海塊體與華南塊體交接地帶,其地殼運動整體向東偏南方向,年速率在厘米級,可能對結果有影響;④ITRF框架轉換參數速度是常數,在長時間跨度下是否會存在變化有待考證。
4結語
通過將測區內待測點與ICS站組網使用GAMIT/GLOBK軟件解算平差得到的空間坐標進行動態轉換,得到的2000國家大地坐標在一定條件下能夠達到國家GPS大地控制網點精度。這種方法不依賴于國家控制點便可獲得工作區域內較高精度的CGCS2000大地坐標,也可用于長期維持一般測區的坐標系統,對于測區附近缺少控制點的區域也十分有益。此類方法僅需少量儀器甚至單臺儀器便可施測,待求點不需要同步觀測,大大提高了外業觀測的靈活性和便利性。目前,該方法的可靠性仍有待進一步驗證,為了保證其精度,需要進一步優化外業觀測流程,提高數據處理手段,整個流程較為復雜且需要較長時間的靜態觀測。另外,站點速度在長時間跨度的動態轉換中十分關鍵,精度仍有待進一步提高。參考文獻:
[1]魏子卿,劉光明,吳富梅.2000中國大地坐標系:中國大陸速度場[J].測繪學報,2011,40(4):403-409.
[2]魏子卿.2000中國大地坐標系及其與WGS-84的比較[J].大地測量與地球動力學,2008,28(5):1-5.
[3]林曉靜,張小紅,郭斐.ITRF2005與CGCS2000坐標轉換方法與精度分析[J].大地測量與地球動力學,2010,30(2):117-119,124.
[4]吳富梅,劉光明,魏子卿.利用局域歐拉矢量法建立CCCS2000速度場模型[J].武漢大學學報:信息科學版,2012,37(4):432-435.
[5]楊久東,王文軍,孔海洋.基于ICS站獲取曹妃甸2000坐標的精度分析[J].礦山測量,2017,45(6):88-91.
[6]張國民,馬宏生,王輝,等.中國大陸活動地塊邊界帶與強震活動[J].地球物理學報,2005,48(3):602-610.
(編輯:李慧)
猜你喜歡
環球時報(2022-12-14)2022-12-14 16:46:27
加油站服務指南(2021年8期)2021-11-04 08:19:06
學生天地(2020年22期)2020-06-09 03:07:52
青春期健康(2019年23期)2019-12-19 08:45:06
當代水產(2019年4期)2019-05-16 03:04:56
小天使·一年級語數英綜合(2018年6期)2018-06-22 10:25:54
華人時刊(2017年23期)2017-04-18 11:56:38
中國現當代社會文化訪談錄(2016年0期)2016-09-26 08:46:12
小學閱讀指南·低年級版(2016年1期)2016-09-10 07:22:44
上海國資(2015年8期)2015-12-23 01:47:33