汽車裝配線三維仿真中的動力學模擬關鍵技術研究
2020-07-27 12:10:17謝江甜巫濱張思琪
現代信息科技 2020年5期
謝江甜 巫濱 張思琪


摘? 要:三維虛擬仿真技術的快速發展,不僅在計算機視覺領域刷新實時渲染的逼真度,對于真實世界物理特性的仿真度也在不斷提升;在新能源汽車裝配線的方案規劃階段,綜合運用虛擬現實引擎提供的物理模擬技術,部署三維場景對象相應的各項動力學屬性,從而實現對整個裝配線運轉狀態的物理特性模擬仿真。動力學模擬參數的設置,需要在仿真過程中檢測并逐步優化,最終實現前期設計階段對規劃方案的高度可感知和可驗證性。
關鍵詞:三維虛擬現實;物理屬性;動力學仿真
中圖分類號:TP391.9;U467.1+3? ? ? 文獻標識碼:A 文章編號:2096-4706(2020)05-0141-04
Research on Key Technology of Dynamic 3D Simulation of Automobile Assembly Line
XIE Jiangtian,WU Bin,ZHANG Siqi
(School of Art & Design,Henan University of Science & Technology,Luoyang? 471000,China)
Abstract:The rapid development of 3D virtual simulation technology not only refreshes the fidelity of real-time rendering in the field of computer vision,but also improves the simulation of real-world physical characteristics. In the scheme planning stage of new energy vehicle assembly line,the physical simulation technology provided by virtual reality is combined to deploy the corresponding dynamic attributes of 3D scene objects The physical characteristics of the whole assembly line are simulated. The setting of dynamic simulation parameters needs to be detected and optimized in the process of simulation,so as to realize the highly perceptible and verifiable planning scheme in the early design stage.
Keywords:3D virtual reality;physical properties;dynamic simulation
0? 引? 言
在國務院“一帶一路”發展戰略和全面發展新能源汽車產業及配套市場的大背景下,新能源汽車產業的制造研發銷售各環節都處于井噴式發展階段。人工智能、物聯網以及虛擬現實等技術的革新發展為新能源汽車的普及開辟了巨大的市場空間,尤其是三維虛擬仿真技術的快速發展,對傳統的汽車設計制造環節帶來了革命性的進步。
在汽車裝配制造環節運用虛擬仿真,可以更高效地模擬出裝配線設計方案的運行狀態、幫助設計師實現整體設計方案的快速迭代。本研究基于新能源汽車個性化定制裝配線的設計需求,在方案論證階段運用基于物理引擎的三維虛擬仿真手段,開發了汽車裝配線三維虛擬仿真系統,通過動力學模塊的綜合調適,對三維裝配場景的各項物理學屬性進行了模擬測試,借助虛擬現實技術在裝配線方案設計初期實現了可驗證性的最大化。
1? 新能源汽車裝配線虛擬仿真分析
汽車裝配方案的設計仿真,需要綜合考慮車型、市場、客戶需求等多方面因素,才能確保仿真測試的有效性。新能源汽車市場相對于傳統而言,除了在動力等方面的技術變革以外,用戶的個性化定制、車型的多樣化需求,也成為了當前車市的發展方向。島式裝配方案相比于傳統的流水線式裝配,具有裝配方案彈性大,方案調整成本低、效率高的優勢。島式裝配模式中,調整AGV短途物流輸送車的運行路線,穿過不同的裝配島,可實現不同配置的車型組裝。具體到裝配系統的整體方案設計中,涉及以下具體要素。
1.1? 主從驅動關系
在三維虛擬仿真場景中,要真實地還原上述關系,需要解決以下關鍵問題:
(1)明確各部件裝配島在安裝序列中的層級關系。各裝配島的坐標參數中,設置層級標簽。當對裝配序列進行調整時,各裝配島在自身所處的層級內移動,不打亂整車中各個部件模組的總裝配次序。
(2)三維仿真場地中同時行駛著大量的AGV物流車,有些是單車運行(裝配件在島內存放),有些則是AGV列車(裝配件隨車底盤運送至相應裝配島)。對于后者,需要建立前后車的主從邏輯,保證入島/出島/島間的跟隨關系。
(3)虛擬仿真情境中,汽車底盤傳動系統各組件之間的主/從驅動關系要符合物理學規律。通過設置運動參數傳遞的方向和路徑,在虛擬場景中實現主/從動件的運動關系同步。
1.2? 時空運動關系
在虛擬仿真場景中,裝配線上各要素的空間位置關系,是仿真檢驗的重要內容。通過三維實景還原設計布局方案:裝配島、AGV物流車、新能源汽車車身、底盤和工位機器人等裝配線上的元素,都基于實物尺寸建立三維數字模型,在此基礎上設計各個裝配島的空間布局,規劃AGV物流車的穿行路徑。結合實際尺寸數據的三維仿真模擬,在裝配方案布局的可行性驗證方面,可實現完全的仿真評估,驗證并排除設計方案在空間布局中的問題。
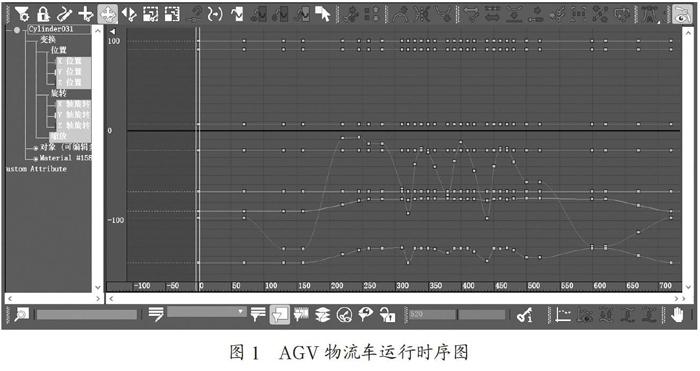
在虛擬三維裝配場景中,除了進行靜態布局的論證,同時還模擬了整個島式裝配體系的工作運行狀態。運行狀態由于加入時序變量,各個裝配島的單位工作時間、AGV物流車的入島/在島/出島/島間行駛時間、公共區域路徑軌道上不同AGV的行駛時段分配等因素都可以在實時運行動畫演示中進行預覽和分析,如圖1所示,幫助用戶發現AGV物流網絡規劃的時空沖突區域,優化整個物流網絡和各個裝配島節點的運轉路線圖。
1.3? 裝配邏輯
虛擬仿真裝配場景不僅用于測試裝配線的時空布局和視覺形態,更重要的是對整車裝配流程中各環節裝配邏輯進行分析驗證。在課題研究中,整車的裝配流程拆分為內飾、底盤、最終線幾大模塊,在裝配島陣列中依次排布。在各個模塊中對裝配島的功能進一步細分:內飾模塊依次包括儀表板、座椅、前后風擋、天窗等功能島;底盤模塊依次包括電動機及電池組、傳動系統、車輪等功能島;最終線依次包括運行測試、整車下線檢測等功能島。整車裝配邏輯自上而下涵蓋了車身、底盤、傳動系統、內外飾、電控系統、電池組等的安裝、檢測和運轉次序。在虛擬仿真情境下,通過物理碰撞檢測,可以測試各部件安裝次序的合理性;通過對部件設置功能運轉的輸入條件/輸出條件標簽,可以測試各組件測試次序的合理性。
在虛擬現實環境下,裝配邏輯的模擬需要對各車身組件的三維數字模型添加相應屬性的標簽,并根據組件之間的動力、電力、空間定位鏈條的輸入/輸出關系,設置各環節的觸發條件和觸發標記,從而實現虛擬現實情境下對整車裝配邏輯的復現。
2? 裝配方案模擬的動力學組合方案
在三維虛擬仿真引擎中,視覺空間的模擬是一方面,另一方面則是物理屬性的模擬測試。在虛擬現實引擎中,運用動力學模塊,可以實現汽車裝配過程中運動約束、剛體碰撞、視野追蹤等物理屬性的仿真檢測。
2.1? 運動鏈接(父子關系)
島式裝配體系中,AGV物流車承擔了各個島之間的運輸工作。其中,車門裝配島、底盤合裝島等環節,需要裝配的組件由物料AGV車運載,跟隨車身主體AGV進入相應裝配島,兩者形成拖掛車組;此外,在各裝配島之間,物流車組常以拖掛序列方式輸送配件。
在裝配線的虛擬仿真場景中,AGV拖掛車組中各單元之間是以動力學模塊MassFX中的hinge鉸鏈對象進行綁定,如圖2所示,該對象限制了兩端對象X/Y/Z軸向的相對移動以及X/Y軸向的相對旋轉,在模擬過程中,相鄰兩節AGV可作Z軸向相對旋轉。
2.2? 路徑約束
在整車裝配場景中,AGV物流車均為無人駕駛車輛,基于機器視覺引導或者磁場信標引導自動行駛,其行駛嚴格遵循設計運行圖中的軌跡和時序。
虛擬仿真場景中,采用了動力學模塊MassFX中的Path Restraint路徑約束,來實現AGV物流車按軌跡運行。在繪制運行軌跡時,按照裝配島的分部,對路徑進行分段標記,再將各段的標簽進行組合,定義出各不同車型裝配方案中AGV車的行駛軌跡。
設置Path Restraint路徑約束時,起點-終點分別對應區間0~100%。在VR引擎中,可以設置路徑上各個區段的權重,并將權重屬性映射為AGV物流車行駛的實時速度,這樣在整個裝配體系實時運行過程中,可以測試并調整AGV物流車運行圖的有效性。
2.3? 剛體碰撞
對汽車裝配線進行虛擬仿真時,為了測試物流系統是否存在布局沖突的情況,需要開啟三維場景中對象的剛體碰撞檢測(rigid-body collide test)。通過實時運行VR場景,查找出對象之間的碰撞錯誤,并對裝配線布局進行調整。
整個島式裝配線的三維場景數據量巨大,約包含了30個獨立裝配島、4條不同車型的裝配流程、20輛待裝配白車身及近百輛沿運行圖行駛的AGV物流車和各種裝配組件。三維場景的建模依據UG三維數字模型制作,細節精度較高,均采用基于物理的真實材質,如圖3所示,整個裝配線場景約含2 450萬多邊形面。場景按設定動畫運行時,若按照三維模型實際的多邊形拓撲結構計算碰撞邊界,其瞬時運算數據量會導致計算機資源耗盡而崩潰。解決的辦法是為各參與碰撞計算的模型設置代理碰撞盒(collider agent),對原對象造型進行簡化概括,生成造型近似但多邊形面數大為下降的幾何體,作為碰撞盒代理。
在虛擬仿真場景運行時,首先設置代理碰撞盒與實體對象的父子連接關系,確保兩者的運動綁定關系;然后,將各物體的碰撞盒代理對象加入剛體碰撞檢測系統,通過這樣的代理技術,保證了復雜三維場景實時剛體碰撞檢測的流暢性和有效性。
2.4? 實現跟蹤
汽車裝配線中,存在著幾種運動跟蹤和捕捉關系:裝配島中固定工位的裝配機器人,在AGV入島/出島/駐停的時候,全程捕捉并朝向白車身操作方位;裝配島監控屏操作臺的工程師,在AGV入島/出島的時候,視線跟隨AGV及白車身,在AGV駐停裝配階段,工程師則監控懸掛監視屏的動態參數。
在虛擬裝配線場景中,上述視覺跟蹤關系,是通過look at解算器模塊實現的。以機械手為例:機械臂底座的運動約束設置為X/Y/Z軸向的移動和X/Y軸向的旋轉鎖死,機械臂各段保留繞自身鉸鏈的旋轉自由度。對機械臂固定底座上的基座對象設置look at解算器,跟蹤的目標設定為白車身。同理,對工程師的頭部骨骼設置look at解算器,跟蹤對象分別為白車身和懸掛監控屏。當虛擬場景運行時,各部分會全程自動對相應的監控目標進行視覺跟蹤,實現自動化運動跟隨捕捉。
2.5? 反向動力學(機械臂)
島式裝配線的各工位均由機械臂自動完成各項組裝工作,如何實現機械臂運動的仿真是關鍵問題。標準島、車輪安裝、車門安裝、風擋/天窗安裝等工位的機械臂前段的抓取部分依據裝配件構造設計成相應的結構,但主體均采用三段式全自由度機械臂模式。
在VR引擎的動力學模塊中,根據運動件之間的狀態繼承關系,主要分為正向動力學(FK)/反向動力學(IK)等模式。對機械臂而言,盡管動力傳遞是從基座經各段手臂最終到抓取端,但從運動學角度而言,抓取端的定位是整個系統運動動態的輸入參數,由此驅動并推演出機械臂各段的運動軌跡,所以要用IK模式進行設置。
基于上述分析,在仿真場景中,打開交互式IK解算器,對機械臂的各段進行設置。基于局部坐標系,設置各段機械臂受約束的自由度,保留可旋轉自由度;在交互式IK模塊中,設置轉動關節的可動角度范圍,并設置轉動跟隨自動終結條件,然后拖曳抓取端,測試各段機械臂的運動動態。通過不斷調整參數,最終得到優化的機械臂IK設置。
設置完成后,在裝配虛擬仿真過程中,用戶只需指定零件(比如汽車風擋玻璃、車輪等)的運動軌跡,機械手可按照真實的運動關系作出動態模擬。
2.6? 其他動力學組件
由于在整個裝配線場景中,大量運動對象之間存在著驅動/被動,跟隨/牽引、跟蹤、碰撞、力場等物理要素的作用,在創建虛擬裝配場景過程中,結合具體情況,綜合運用了VR引擎中的滑塊約束、轉樞約束、HI/HD解算器等多種動力學模塊進行物理屬性的設置,實現了整個裝配線按照真實物理規律運行的目標。
3? 案例創作實踐及測試
結合上述的設計方案,本研究基于3DS Max三維數字建模+Unity3D虛擬仿真平臺,開發了新能源汽車AGV島式裝配線的虛擬仿真系統。仿真平臺模擬的定位是對某型新能源汽車的整車裝配線進行全面的模擬。裝配線采用島式裝配方案,整體規模為并行標準裝配流程線4條,可擴充并行裝配流程線2條。通過調整裝配島配置,具備同時為同一車系的6種不同型號車型整車裝配的能力。
本研究的虛擬仿真系統從3個方面進行方案驗證:裝配線空間布局方案、AGV物流體系運行圖、視覺仿真。其中空間布局在靜態場景模式下即可進行測試,場景運行時需要開啟剛體碰撞檢測;AGV物流體系運行圖是在仿真場景動態運行過程中完成測試和問題排查。經上述動力學模塊的設置和檢測,測試中排查了5處運行圖時空序列中的沖突點,重新調整AGV運行圖后,再次測試裝配線整體運轉實現了正常運轉,達到了預期的仿真測試目標。
4? 結? 論
三維圖形技術運用于實時虛擬仿真,可以在工程設計的前期方案論證階段完成多方面的測試工作。首先,基于三維數字模型的仿真場景,能協助設計師從視覺層面審視設計方案的布局效果和運行狀態;其次,通過利用VR引擎中的動力學模擬模塊,可以對虛擬場景中對象的運動關系、空間占位關系、碰撞結果、運行路線、時序安排、運動跟蹤等要素進行實時模擬,實現真實汽車整車裝配線高度還原的情境再現,在前期設計階段達到最大限度的方案可感知性。
參考文獻:
[1] 黃楚峰.MR混合現實技術在汽車設計中的應用研究 [J].藝術科技,2019,32(7):97-98.
[2] 倪攀,孟海龍.石油工程生產事故應急實訓虛擬仿真系統開發研究 [J].現代信息科技,2019,3(15):97-98+101.
[3] 胥程飛.用戶體驗和交互設計在工業設計中的應用 [J].包裝工程,2019,40(12):294-297.
[4] 趙陽,姜兆亮,馬嵩華,等.汽車三維在線展示與虛擬試駕系統研究 [J].包裝工程,2018,39(18):124-128.
[5] 陳清奎,李昊,魏鑫鑫,等.汽車檢測線虛擬仿真實驗教學系統設計研究 [J].電腦知識與技術,2019,15(34):76-77+96.
[6] 高健權,方新國.產品制造工藝虛擬仿真教學平臺的研究 [J].設計,2019,32(11):80-82.
[7] 劉東,屈旋,劉文博,等.虛擬裝配仿真技術在運載器裝配中的應用 [J].工程建設與設計,2018(24):261-263.
作者簡介:謝江甜(1998-),女,漢族,河南洛陽人,本科,研究方向:計算機三維高級圖形設計;巫濱(1978-),男,漢族,江蘇常州人,博士,副教授,研究方向:真實感計算機圖形繪制、可視化虛擬仿真設計;張思琪(1997-),女,漢族,河南洛陽人,本科,研究方向:交互式三維仿真設計。
