基于偽衛星與微慣導組合的室內定位終端設計
2020-07-25 02:57:32陳振杰蔚保國祝瑞輝賈浩男康習勇
無線電工程 2020年8期
關鍵詞:信號
杜 凱,陳振杰,蔚保國,祝瑞輝,賈浩男,康習勇
(1.衛星導航系統與裝備技術國家重點實驗室,河北 石家莊 050081;2.戰略支援保障部隊航天系統部駐石家莊地區軍代室,河北 石家莊 050081)
0 引言
人們大多數時間生活在室內。特別是在大型商場購物、地下停車場尋車和體育場進出口查找等場合,人們對室內場合位置服務需求迫切。王楊[1]和席瑞[2]等人對室內主流定位技術和原理進行了總結。石高濤[3]等人研究了基于WiFi智能手機室內定位方法。基于射頻識別的室內定位技術被廣范地研究[4-6],常用于制作電子圍欄系統。超快帶是一種高精度室內定位技術[7]。文獻[8-9]改進了基于到達信號強度和信號指紋的定位方法,為室內定位提供了思路,然而WiFi室內定位精度較低,不能滿足用于高精度的需求,射頻作用距離和范圍有限,雖然超快帶能夠提高較高的定位精度,但需要專門的接收設備,無法用常規商用接收機芯片融合。北斗偽衛星是一種能夠發射北斗B1/GPS L1導航信號的地面無線基站設備,是室內定位常用的一種技術手段。
基于北斗偽衛星的定位終端可以借助現有的商用芯片,只需要修改定位芯片的軟件,無需更改硬件,能實現室外GNSS和室內北斗衛星信號的同時接收和解析,且基于北斗偽衛星的室內定位技術能夠實現高精度室內定位[10]。然而,目前的室內定位終端采用智能手機[11]和基于GNSS接收機,都是室外定位終端[12-14],直接使用都無法接收室內偽衛星信號。考慮到北斗偽衛星具有與空間導航信號相同的缺點,即無法在遮擋區域實現正常定位,因此,在室內走廊、角落等區域,單獨使用北斗衛星無法滿足連續定位。本文將偽衛星定位和微慣導定位無縫融合,利用微慣導在遮擋區域進行連續定位,解決了空間導航信號不連續的問題。
1 終端總體設計
終端包括天線、北斗偽衛星定位模塊、慣性傳感器定位模塊、智能手機和軟件APP模塊。其中,北斗偽衛星定位模塊用于接收、解析北斗偽衛星導航信號,并將解析出的數據經藍牙上傳到智能手機端。慣性傳感器安裝在行人腳部,用于采集行人運動狀態參數,并經藍牙上傳到手機端。智能手機通過藍牙接收北斗偽衛星模塊和慣性傳感器模塊信號,送入到軟件APP模塊實現組合定位和位置的界面地圖顯示,如圖1所示。
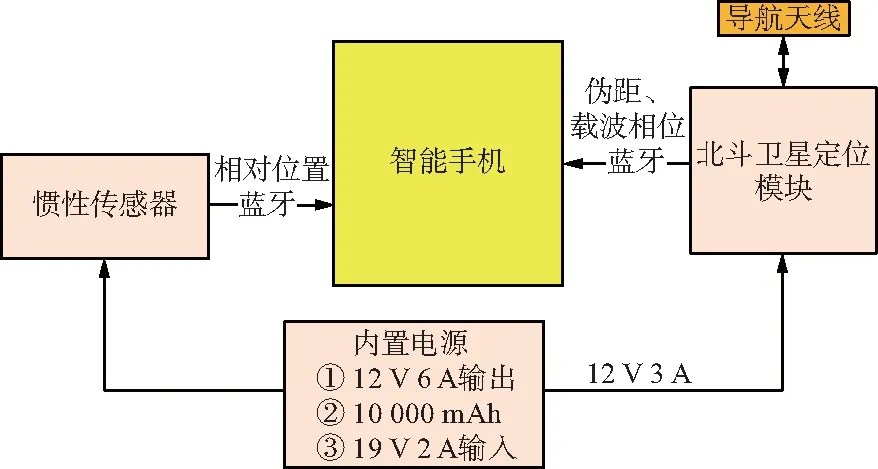
圖1 室內定位終端組成Fig.1 Composition of indoor positioning terminal
1.1 小型化四臂螺旋天線
考慮到便攜性,本終端采用了小型化、高精度的四臂螺旋天線,如圖2所示。該天線具備以下優點:支持3系統7頻點B1/B2/B3/L1/L2/G1/G2,高精度高質量高動態信號接收,八臂四饋零相位技術,高精度,結構輕小,僅為19 g,支持GNSS差分高精度定位。天線接口為SMA-K形式。

圖2 小型化四臂螺旋天線Fig.2 Miniaturized four-arm helical antenna
1.2 北斗偽衛星定位模塊
室內定位模塊基于衛星導航定位芯片設計,集成了LNA,SAW和TCXO、藍牙和電源設計等器件,可以接收BD B1,GPS L1,GLONASS L1 和Galileo E1等4個頻點的衛星信號實現精確定位,具有極低功耗與小體積特點。其衛星導航定位芯片內置偽衛星IP軟核,能夠接收和解析北斗偽衛星導航信號。整個室內定位模塊的組成如圖3所示。
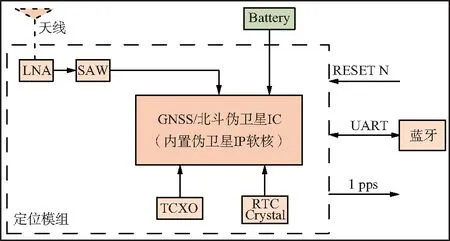
圖3 偽衛星定位模塊組成Fig.3 Pseudolite positioning module
北斗偽衛星IP軟核是一段程序代碼,使衛星導航芯片能夠捕獲跟蹤北斗偽衛星導航信號,并輸出導航信號的原始觀測量信息(偽距、載波相位和多普勒等)。內置北斗衛星IP軟核的衛星導航芯片能夠同時接收解析空間導航衛星和室內北斗偽衛星信號。
1.3 微慣性傳感器定位模塊
微慣導定位功能模塊組成,如圖4所示。主要由傳感器、處理器、電源和嵌入式算法軟件等組成,其中定位方式包括較高精度的微慣性器件,通信方式包括藍牙和RS232/422。
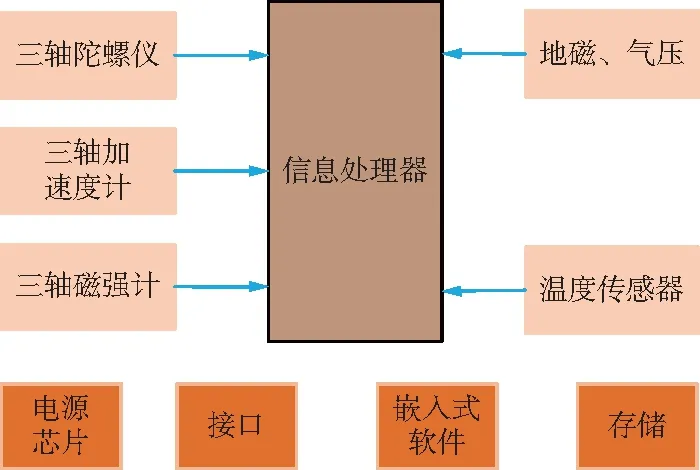
圖4 微慣導定位功能模塊組成Fig.4 Composition of micro inertial navigation module
微慣性傳感器安裝在腳部,主要采用運動約束微慣導定位算法。雙足交替前進過程中,雙腳交替前進,一腳靜止,另一腳邁動,單步過程靜止時間約占38.5%,靜止運動特征可被足部穿戴微慣性傳感器識別,用以輔助微慣性導航。分析顯示,純慣導定位誤差隨時間呈指數增長,有靜止特征約束微慣導定位誤差呈線性增長,理論上可以提供定位精度。
行人運動特征示意如圖5所示。微慣導室內定位誤差發散如圖6所示。
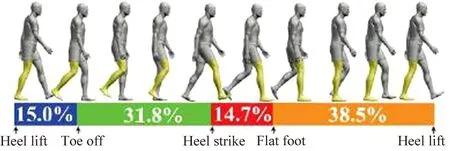
圖5 行人運動特征示意Fig.5 Schematic diagram of pedestrian movement characteristics
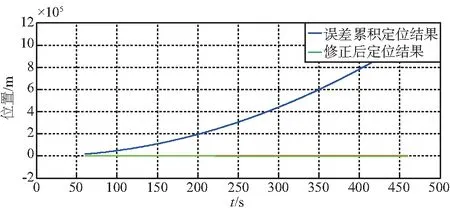
圖6 微慣導室內定位誤差發散Fig.6 Divergence of indoor position error for micro inertial navigation
1.4 電源設計
電源模塊負責將鋰電池提供的3.3~4.2 V的電壓轉換為室內定位模塊所需的3.3,3.0,1.8,1.2 V,如圖7所示。
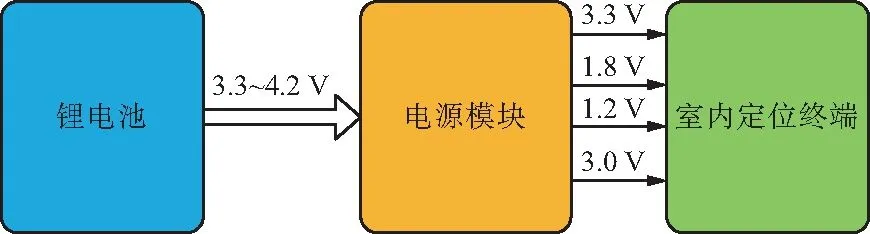
圖7 電源轉換示意Fig.7 Schematic diagram of power conversion
鋰電池具備充放電功能,其中充電管理單元主要負責對鋰電池進行充放電管理。通過外接適配器給鋰電池充電,充電過程中通過指示燈顏色標識出充電或充滿狀態,同時可以對鋰電池剩余電量給出信號指示。當剩余電量不足時給出警告提示并關機保護。
1.5 外殼結構設計
手持定位終端的結構殼體設計借鑒手機電池背夾的結構形式,需要考慮的設計要素:方便攜帶、容易與手機結構結合并固定。考慮到各型號手機的生命周期短的特點,需要進一步考慮手持定位終端的結構殼體可以兼容多型手機的結構形式,可與不同尺寸的手機貼合使用,如圖8所示。

圖8 外殼結構Fig.8 Shell structure
1.6 通信
通信模塊采用無線和有線2種方式,其中無線采用低功耗藍牙模塊,適用于北斗偽衛星定位模塊、慣性傳感器模塊與智能手機連接。保留了北斗偽衛星模塊與智能手機的有線連接方式,即通過OTG數據線分別連接智能手機與北斗偽衛星定位模塊的Type-C接口。
2 終端軟件設計
終端軟件由觀測量采集軟件、定位解算軟件和應用軟件組成。觀測量采集軟件實現北斗偽衛星定位模塊和慣性傳感器定位模塊的接入和觀測量數據獲取;定位解算軟件包括北斗偽衛星定位解算和慣性傳感器定位解算;應用軟件實現了偽衛星和慣性傳感器的智能混合定位,并疊加高精度室內地圖。終端軟件組成如圖9所示。
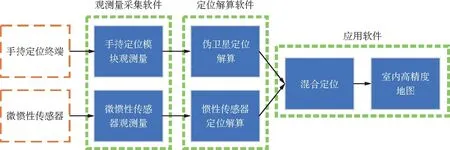
圖9 終端軟件組成Fig.9 Terminal software composition
2.1 觀測量采集軟件
觀測量采集軟件利用低功耗藍牙(BLE)與手持定位模塊和微慣性傳感器進行數據傳輸,BLE的連接建立在通用層性配置文件(Generic Attribute Profile,GATT)協議之上。GATT 是一個在藍牙連接之上的發送和接收很短的數據段的通用規范。GATT給設備定義了若干角色,其中主要的2個是外圍設備和中心設備,外設通過廣播自己來讓中心設備發現自己,并建立GATT連接,從而進行更多的數據交換,一個外設只能連接一個中心設備,而一個中心設備可以連接多個外設。將智能手機作為中心設備,手持定位模塊和微慣性傳感器作為2個外圍設備進行觀測量傳輸。GATT連接拓撲如圖10所示。
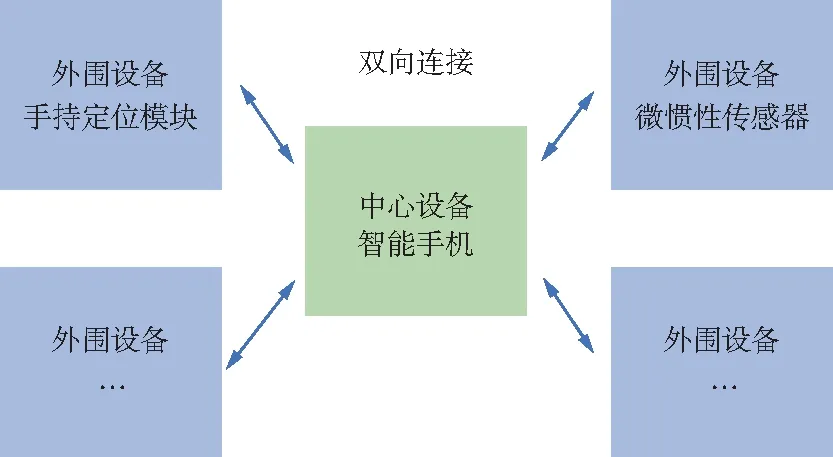
圖10 GATT連接拓撲Fig.10 GATT connection topology
2.2 定位解算軟件
定位解算軟件包括偽衛星定位解算和微慣導定位解算2部分。偽衛星定位解算采用載波相位差算法,實現亞米級定位。微慣導定位解算是在已知位置點上,利用相對位移進行位置推導。由于微慣導傳感會在固定方向上產生角度偏差,隨著位移增大,導致其定位誤差越大,因此需對慣導定位結果進行糾偏,糾偏算法如下:

2.3 應用軟件
應用軟件接收偽衛星和微慣導2類定位結果,并對定位結果進行融合擇優,輸出最終混合定位結果,疊加高精度地圖,將組合定位終端的定位結果進行可視化展示。
應用軟件定位混合流程可描述如下:① 接收偽衛星定位結果,同時記錄第一個定位結果作為微慣導初始點;② 位移后記錄偽衛星定位結果作為微慣導糾偏點,并計算出微慣導角偏差;③ 當偽衛星因信號遮擋等原因無法解算出定位時,利用角偏差計算微慣導定位結果并輸出;④ 當偽衛星信號重新捕獲后,輸出偽衛星定位結果,并記錄偽衛星的高精度定位結果作為微慣導糾偏點。終端軟件界面如圖11所示。
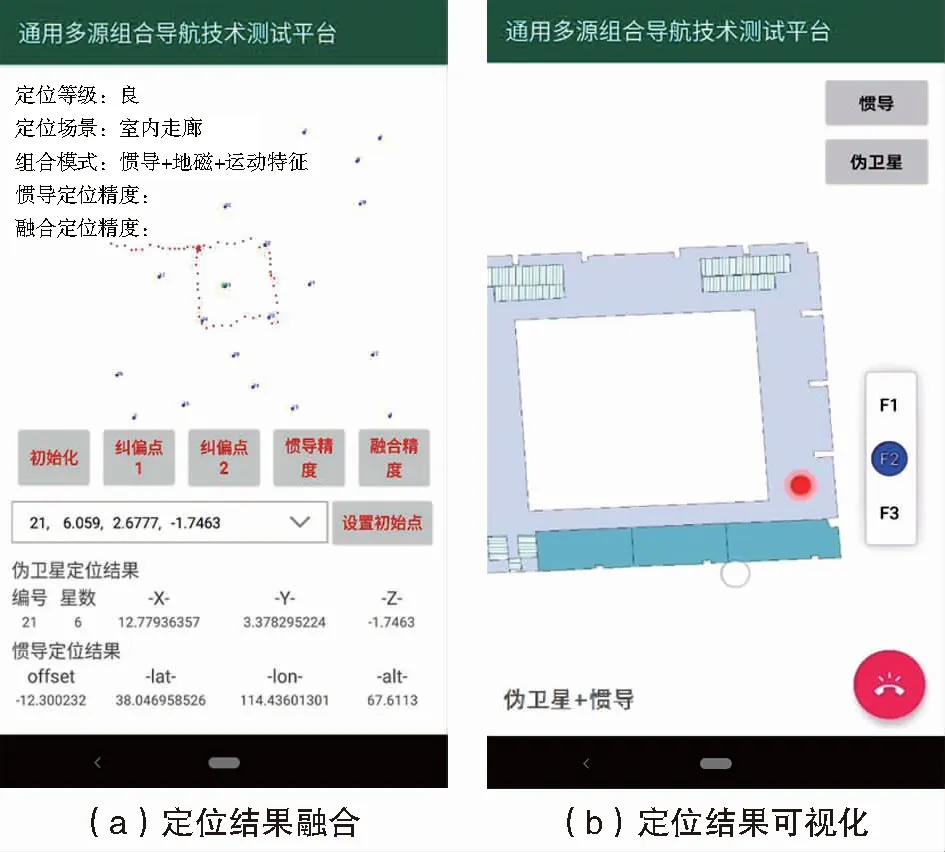
圖11 終端軟件界面Fig.11 Terminal software interface
3 試驗分析
試驗采用自主研制的室內定位終端,如圖12所示。
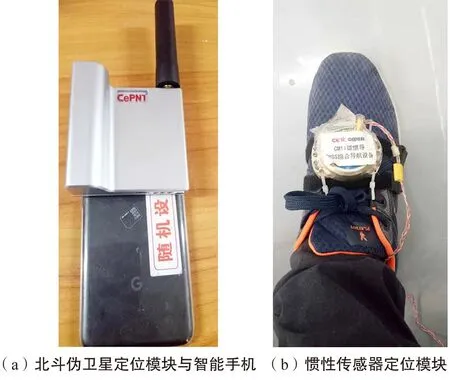
圖12 北斗偽衛星與慣性傳感器室內定位終端Fig.12 Indoor positioning terminal of pseudolite and inertial sensor
試驗時,啟動北斗偽衛星與慣性傳感器定位終端,運行智能手機端APP軟件,點擊藍牙連接,將北斗偽衛星與慣性傳感器數據經藍牙上報的智能手機,開啟位置數據記錄功能。試驗場地選擇某單位C7人工智能試驗場及其周邊室外區域,試驗路徑包括室外和室內2部分。實驗者從室內出發,沿室內規劃的矩形軌跡行走2周后沿室內墻壁從C7樓北門出去,然后從C7樓東邊道路由北向南行走,從C7南門進入,最終回到起點。當行走至參考點1,2,3,4,5,6時,點擊保存10 s定位結果,用于定位精度分析。試驗環境和試驗定位軌跡如圖13所示。定位結果如表1所示。
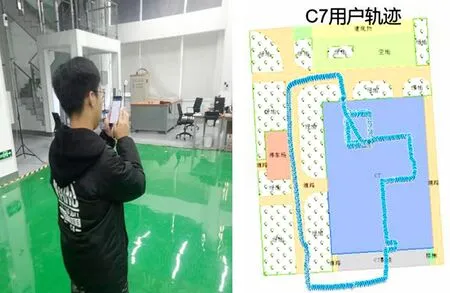
圖13 試驗環境和試驗定位軌跡Fig.13 Test environment and test result trajectory

表1 定位結果Tab.1 Position results
通過數據分析可知,室內組合定位終端平均定位精度優于0.3 m。
4 結束語
本文提出的北斗偽衛星與慣性傳感器室內組合定位終端,通過將偽衛星定位IP軟核內嵌到衛星導航芯片的方法,實現了北斗偽衛星信號的接收。與慣性傳感器結合,解決室內連續無縫的高精度定位。隨著人們對室內位置服務需求的增長及北斗偽衛星和慣性觸感器組合定位技術的不斷改進,該定位終端將會得到更多應用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
