基于電動汽車交流充電控制導引電路的整車信息交互研究
2020-07-24 10:17:06魏莉莉褚言軍肖林海
汽車電器 2020年7期
魏莉莉,褚言軍,肖林海
(北汽福田汽車股份有限公司,山東 濰坊 261000)
電動汽車進行充電時可以通過直流充電樁和交流充電樁進行充電,國標對兩種充電連接控制導引原理、通信協議、充電槍尺寸邊界均進行了規范化。通過直流充電樁進行充電時,直流充電樁通過直流充電控制導引電路、CAN通信 (GB/T 27930-2015《電動汽車非車載傳導式充電機與電池管理系統之間的通信協議》)實現充電連接確認、電池包信息和充電樁信息的交互,這種充電形式基于CAN總線進行信息交互,容易實現車輛與充電樁信息的傳遞,方便車輛充電信息的收集和分析。通過交流充電樁進行充電時,通過CC、CP控制回路實現充電連接確認、準備就緒、最大充電限值、充電狀態保持、充電結束等信息傳遞。這種充電形式通過CC、CP控制導引電路進行狀態判斷,充電樁無法獲取車輛的VIN、動力電池狀態等信息,即無法識別哪輛車在充電,不能對各車輛的充電信息進行管理。
1 系統分析
國標GB/T 18487.1—2015《電動汽車傳導充電系統第一部分:通用要求》規定的充電模式3連接方式C的控制導引連接電路原理如圖1所示。CC信號用于充電槍的連接確認及線纜的過電流能力確認,CP信號用于激活車載充電機或車載控制裝置 (如電池管理系統)等,通過CP回路的PWM信號判斷充電樁的輸出能力。為方便分析,本文以CC、CP信號全部接入車載充電機 (以下稱OBC)來進行研究。
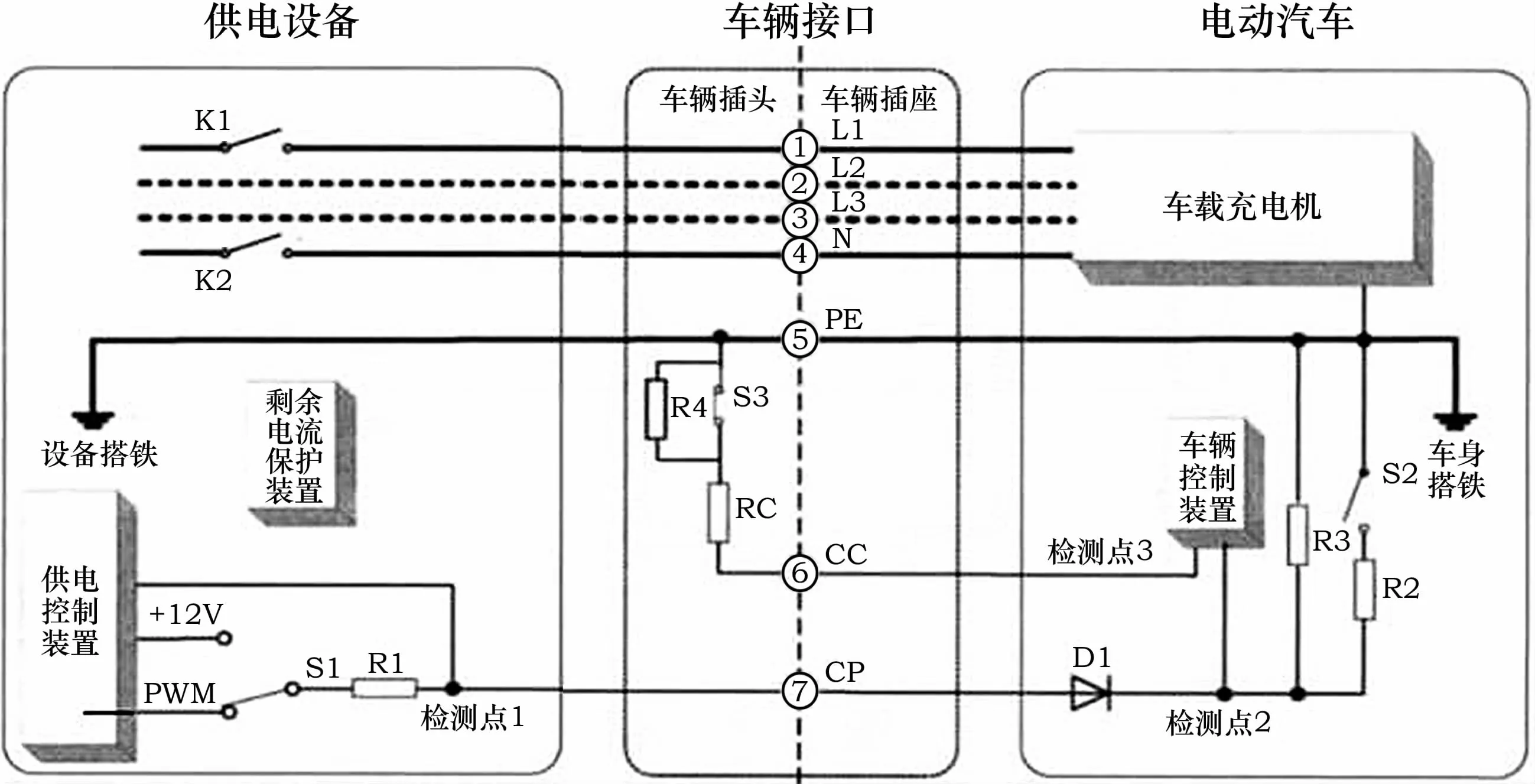
圖1 充電模式3連接方式C的控制導引連接電路原理圖
充電開始過程大致如下:當充電槍連接后,充電樁S1開關+12V側,OBC被激活,充電樁通過判斷檢測點1的電壓判斷充電槍是否已連接,確認連接后將S1開關切換至PWM。OBC通過判斷檢測點3與PE之間的電阻值來判斷充電槍是否完全連接以及線纜的載電流能力,通過判斷檢測點2的PWM占空比信號確認充電樁的供電能力,在OBC自檢、確認連接、并判斷電池組處于可充電狀態時,OBC閉合開關S2,車輛準備就緒完成,充電柱通過檢測點1收到車輛準備就緒狀態后控制K1、K2閉合輸出高壓。
由于充電槍接口和充電插座接口為國標規范接口,無法增加其他控制導引電路或CAN線,可考慮增加整車控制器 (以下簡稱VCU)PWM輸出引腳與CP線的連接回路,如圖2所示。充電槍連接后,在交流充電準備過程中S1開關切換到PWM之前,通過VCU的PWM引腳輸出一定頻率的占空比信號來發送整車的VIN等車輛信息。整車信息發送完畢后,再將S1開關切換至PWM進行后續充電流程。發送PWM波的控制器也可以是車載其他控制器,如OBC、BMS(電池管理系統)等,考慮到主機廠一般會在VCU中寫入VIN號,并且VCU會獲取車輛的電池、電機等狀態信息,用VCU實現PWM信號輸出可減少其他信號轉發環節。

圖2 整車控制器PWM輸出與CP信號連接示意圖
2 PWM波的信息傳遞實現
假設在充電之前整車需要將VIN號LVAC220B6HS000105發送至充電樁,VCU需將字母和數字依據ASCII碼對照表進行轉換,然后轉換為二進制進行發送。常用的字符和字母的ASCII碼對照表如表1所示,對照表1中每個數字或字母用6位或7位二進制表示,通過PWM波形式發送時,每個字母或數字用8位二進制表示,不足8位的高位補0。
所發送的PWM信號的格式如下。

表1 常用字符和字母的ASCII碼對照表
1)PWM波分為3種占空比格式:20%、50%和80%。其中,占空比20%的PWM波對應二進制的0;占空比80%的PWM波對應二進制的1;而占空比50%的PWM波僅作為PWM信號開始和結束的間隔符使用,不作為數字或字母的解析位。
2)PWM波由4部分組成:信號起始段、VIN數據傳輸段、CheckSum校驗 (4位)、結束段。信號開始段為2個連續發送的占空比50%的PWM信號;VIN數據傳輸段由17*8=136個周期的PWM波組成;CheckSum校驗位由4個PWM信號組成;VIN傳輸完成標識段為3個占空比50%的PWM信號,如圖3所示。
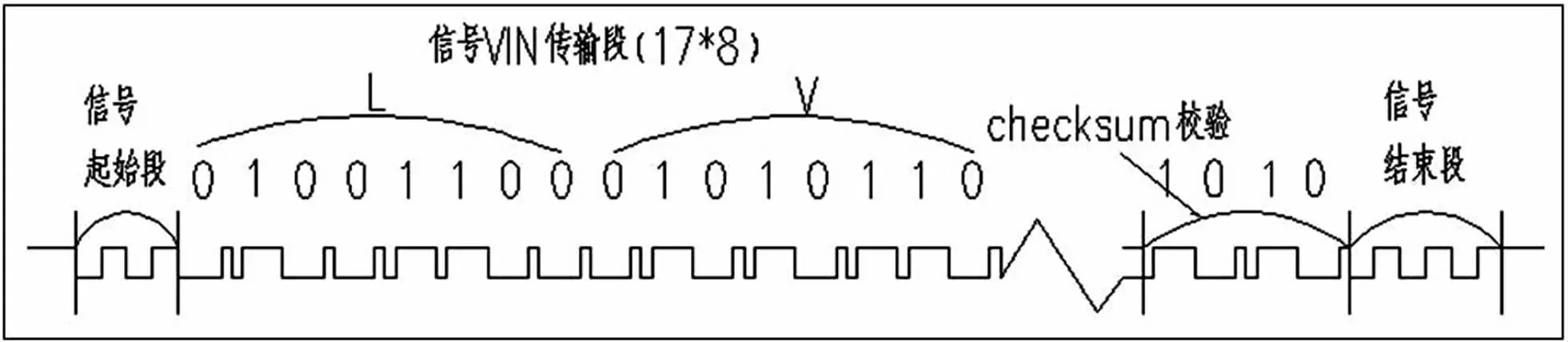
圖3 PWM波格式
3)車輛VIN重復發送3次,整個傳輸過程的示意圖如圖4所示。
4)整個VIN的發送共需145個PWM周期,需要重復發送3次VIN號,共需435個周期。PWM信號發送頻率為100Hz,所以整個VIN信號的發送時間不到5s。
CheckSum校驗位采用“和”校驗,VIN傳輸段數據中 (17*8)“1”的個數相加轉換為二進制取低4位作為校驗碼。在接收方收到數據時,如果“1”的個數“和”的低4位與校驗碼相同,表示傳送正確,否則表示傳送錯誤。
3 交流充電的兼容性分析
這種通過PWM波發送整車信息的形式需要充電樁、OBC、VCU軟件做適應性的更改,充電連接后充電樁S1開關需要延遲從+12V向PWM切換,同時具備識別VCU發送的PWM波格式的功能;OBC需要將CP的信號狀態通過CAN總線告知VCU,VCU根據CP信號狀態決定是否發送PWM信號,防止充電樁和VCU同時發送PWM信號導致CP信號狀態無效。但是這種適應性更改的同時整車仍需能夠使用通用的交流充電樁充電,控制流程圖如圖5所示,紅色虛線框部分是充電樁、OBC、VCU在需要發送整車信息時的控制交互流程。

圖4 PWM波傳輸過程示意圖

圖5 優化后的慢充控制流程簡圖 (紅色虛框為整車信息交互部分)
4 結束語
本文闡述的CC、CP信號在電氣原理中是按照全部接入OBC進行分析的,也可以接入到其他車載控制裝置進行分析,但原理是相似的。這種利用車載控制器 (本文以VCU為例)輸出PWM進行傳送整車信息的形式,只增加一根導線回路,車輛及充電樁改動成本少,通過軟件的優化就可以實現專用充電樁和通用充電樁的兼容,能夠方便物流、租賃公司對每輛電動車的充電成本等數據進行管理分析,對公司運營管理起到一定的作用。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
