商用車輔助駕駛系統感知傳感器特性及選型分析
2020-07-24 10:17:02孟祥虎
汽車電器 2020年7期
關鍵詞:系統
朱 龍,周 旋,王 凱,孟祥虎,黃 帥
(徐州徐工汽車制造有限公司,江蘇 徐州 221100)
隨著智能駕駛技術乃至無人駕駛技術的發展,汽車智能化已經成為汽車制造商普遍關注的重點,在傳統汽車追求性價比和駕乘體驗的基礎上,智能化所驅使的不僅僅是駕乘體驗提升,更帶來的是安全概念從被動安全向主動安全的轉變,從而使得車輛行駛安全上升到另一個高度。
全球范圍內,每年有千萬量級的交通事故發生,造成的經濟損失多達全球GDP的1%~3%,而其中追尾事故的占比尤為凸顯 (美國占比為29.5%,德國為28%)[1]。隨著經濟的快速發展和道路狀況的改善,中國汽車保有量持續攀升,交通事故總量呈上升趨勢,據統計[2],中國萬車死亡率已居世界首位。高速公路上涉及到貨運車輛的 (死亡)事故超過60%,高速公路上貨運車輛涉及到的交通事故居高不下,而且有上升的趨勢。針對這一嚴峻形勢,中國相繼發布了相關法規[3~5],對商用車輔助駕駛系統的配備做出了強制規定,以在政策層面推動主動安全系統在商用車領域的量產落地。
鑒于商用車在交通運輸行業的特殊地位及其對主動安全技術的迫切需求,汽車零部件供應商均在考慮滿足主動安全系統性能要求的同時,會重點控制系統主要傳感器組成的成本。因此,針對商用車智能駕駛系統的階段性需求,如“雙預警” (前車碰撞預警及車道偏離預警)、自動緊急制動(Automatic Emergency Braking,AEB)、盲區探測 (Blind Spot Detection,BSD)、駕駛員監控系統 (Driver Monitoring System,BSD)等,有必要對包括視覺、毫米波雷達以及激光雷達等道路環境感知傳感器進行優劣對比分析,為當前應用需求提供參考。
1 傳感器基本原理
視覺、毫米波雷達以及激光雷達是目前智能駕駛的主要傳感器,因此本文將對這3種傳感器的特性進行分析。
1.1 視覺傳感器
視覺傳感器是通過單目或者多目攝像頭對道路環境進行圖像采集,并采用機器學習算法對包括車輛、行人、車道線、標識牌等道路元素進行識別的傳感器。傳感器采集的圖片或視頻通過計算機視覺算法進行道路環境感知的效果如圖1所示。
道路元素檢測是視覺感知的首要任務,在此基礎上,通過視覺測距算法,對道路元素進行定位。以車輛測距為例,單目視覺采用小孔成像原理[6]對目標離攝像頭的橫向距離和縱向距離進行計算。如圖2所示。

圖1 單目視覺目標檢測
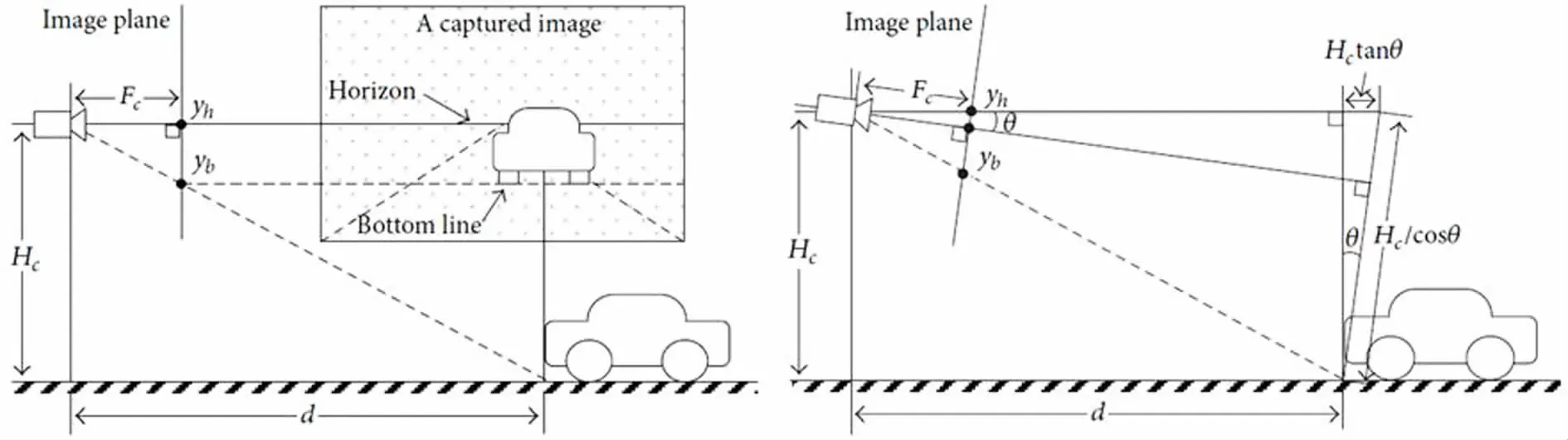
圖2 單目視覺測距
除此之外,雙目立體視覺也是智能輔助駕駛系統感知研究與應用的另一個重要方面,但其原理跟單目視覺相比存在較大差異。雙目立體視覺類似于人眼的視差原理,對障礙物進行三維坐標的檢測,然后才進行目標類別的識別。雙目立體視覺目標感知效果及其定位原理如圖3所示。
無論是單目視覺還是雙目立體視覺,其基礎均是通過鏡頭與感光元器件對環境進行成像,那么其成像品質直接影響目標的檢測與定位。因此,視覺傳感器的感光原理決定其在不同光照條件成像的魯棒性是視覺傳感器的難點。夜間、雨霧天、逆光等環境因素對視覺傳感器帶來較大挑戰,因為極端天氣或光照環境會引起目標圖像特征的局部喪失,進而影響目標的檢測與定位。
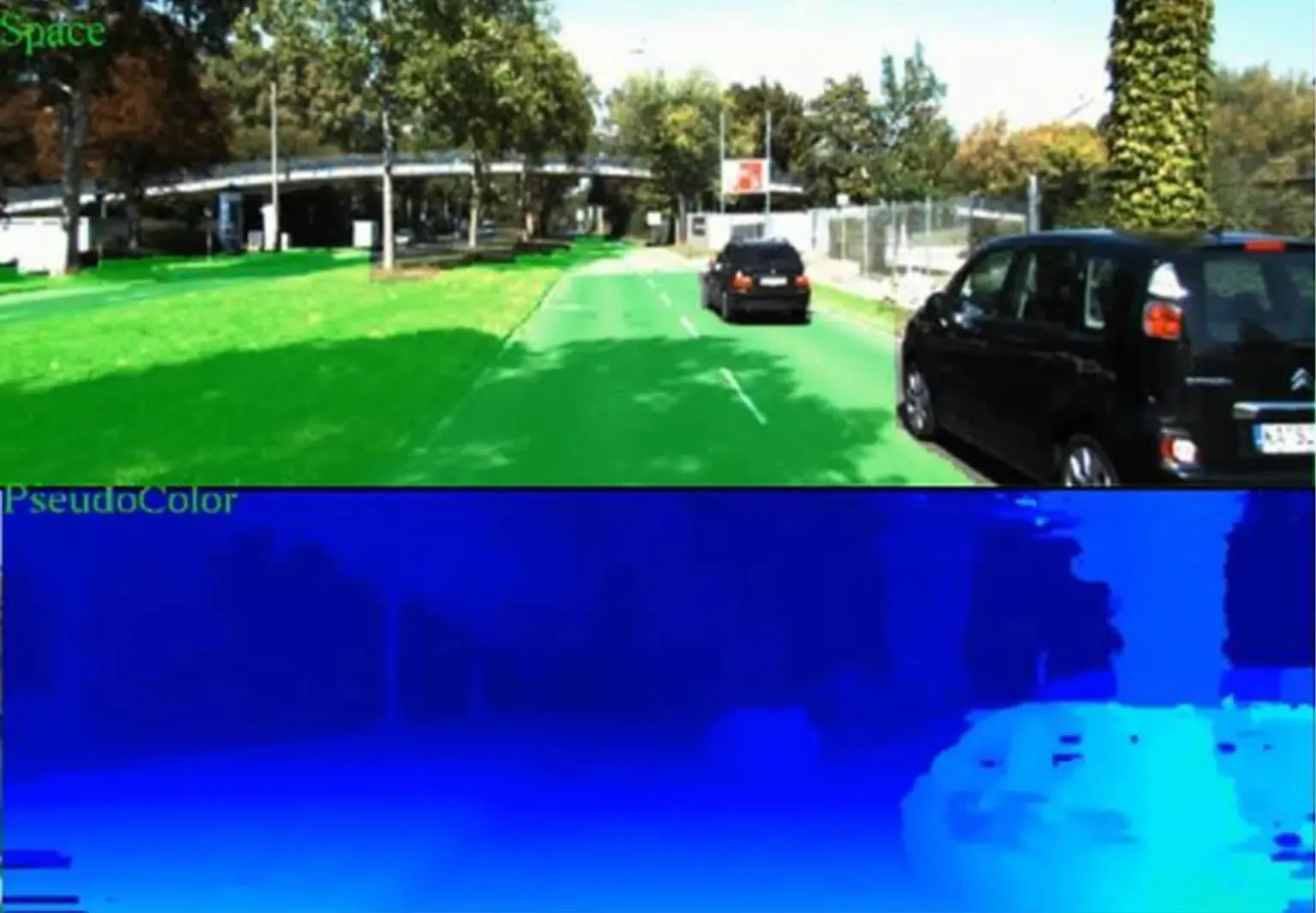
圖3 雙目視覺目標感知[7]效果及其定位原理
1.2 毫米波雷達
隨著集成電路和天線設計等技術的發展與進步,元器件成本的不斷降低,車載毫米波雷達成為智能駕駛系統普遍使用的感知傳感器。車載毫米波雷達利用天線發射電磁波后,對前方或后方障礙物反射的回波進行檢測,并通過信號處理器計算出與前方或后方障礙物的相對速度和距離。
由于毫米波雷達的特殊波段,使得其穿透能力強,不受天氣影響。盡管大氣對某些雷達波段的傳播具有衰減作用,毫米波雷達無論在潔凈空氣中還是在雨霧、煙塵、污染中的衰減都弱于紅外線、微波等,具有更強的穿透能力。毫米波雷達波束窄、頻帶寬、分辨率高,在大氣窗口頻段不受白天和黑夜的影響,具有全天候的特點。這一點與視覺相比,非常具有優勢。圖4為毫米波雷達目標探測。
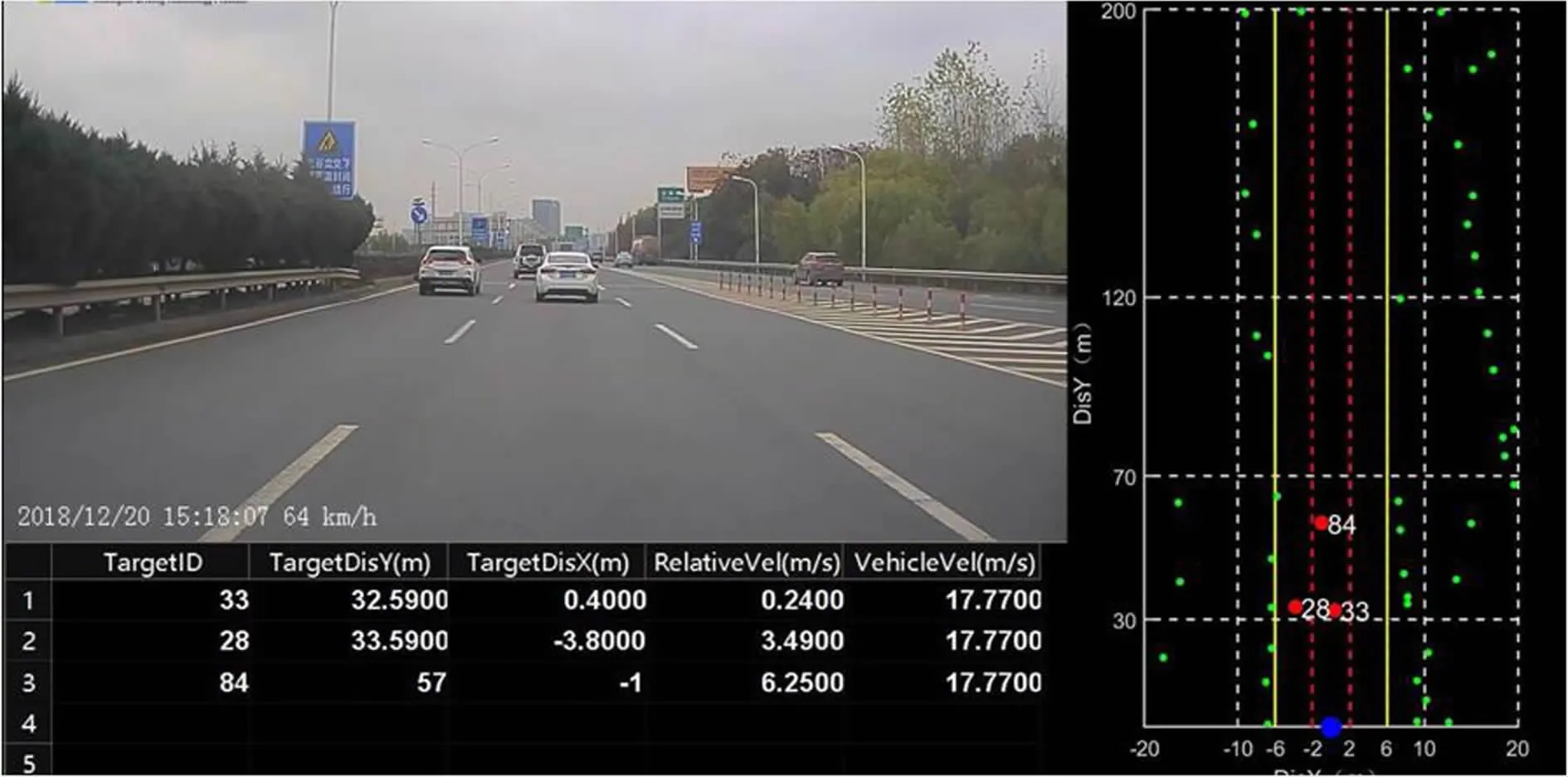
圖4 毫米波雷達目標探測
1.3 激光雷達
激光雷達是傳統雷達技術與現代激光技術相結合的產物。它的基本原理是:向被測目標發射探測信號 (激光束),然后測量反射或散射信號的到達時間、強弱程度等參數,以確定目標的距離、方位、運動狀態及表面光學特性。LiDAR的工作原理:飛行時間法 (ToF),就是根據激光遇到障礙物后的折返時間,計算目標與自己的相對距離。激光光束可以準確測量視場中物體輪廓邊沿與設備間的相對距離,這些輪廓信息組成所謂的點云并繪制出3D環境地圖,精度可達到厘米級別,如圖5所示。
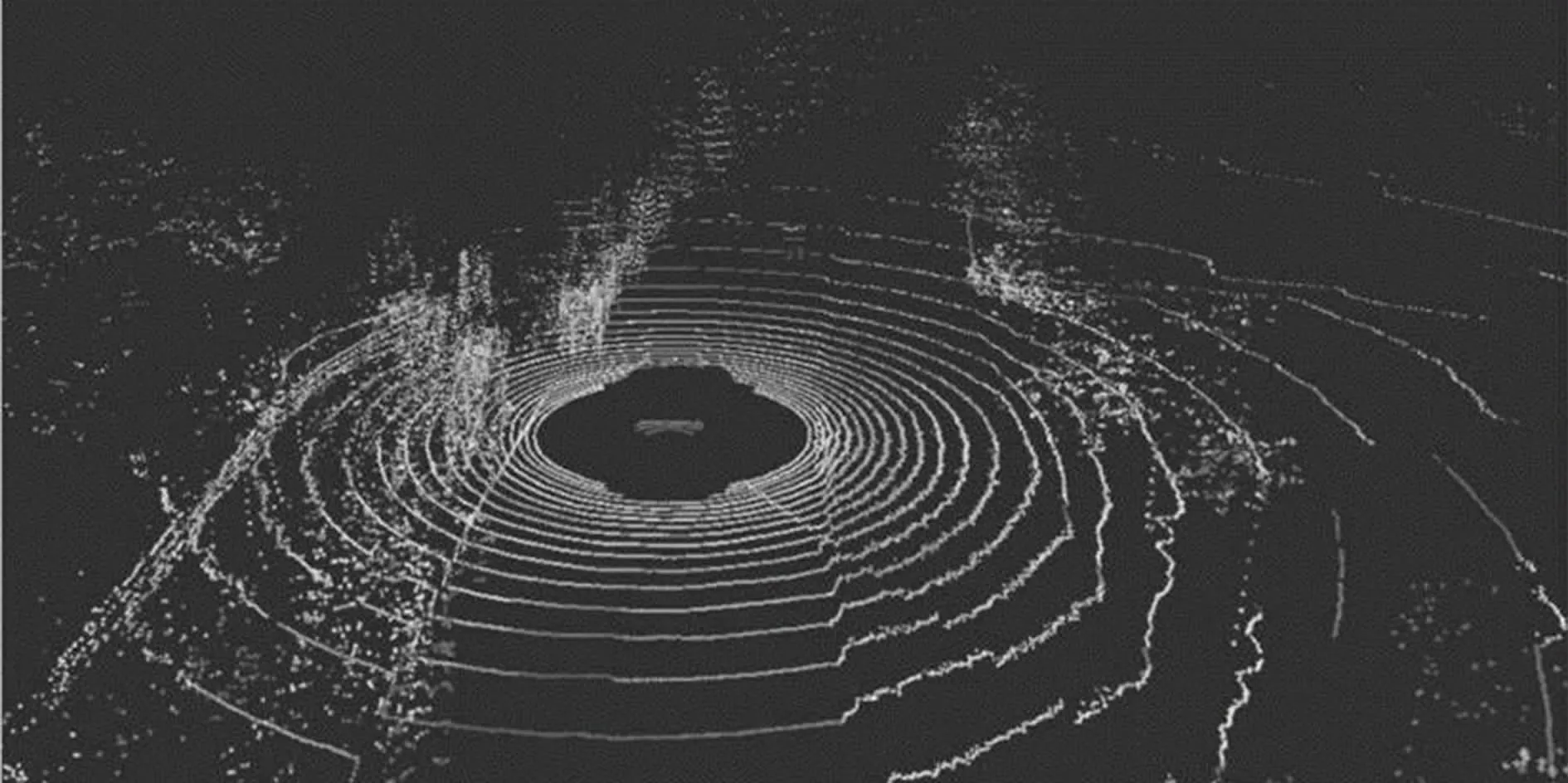
圖5 激光3D點云圖
2 傳感器特性對比分析
視覺、毫米波雷達及激光雷達,工作原理不同,道路環境感知的性能也差異明顯。考慮到汽車輔助駕駛系統對性能、成本以及可安裝性等方面的要求,有必要從傳感器尺寸、成本、性能及環境魯棒性等幾個方面進行對比分析,從而更合理地根據應用需求選擇傳感器。
如前所述,視覺光學成像的原理及其感光傳感器的特性直接影響道路環境的成像品質,目前各攝像頭供應商也分別在圖像信號處理 (Image Signal Processing,ISP)方面投入較多,以盡力提升成像品質。ISP技術包含自動白平衡(White Balance,WB)、自動曝光控制 (Automatic Exposure Control,AEC)、高動態范圍 (High Dynamic Range,HDR)等。ISP可以在不同光照條件下使得顏色不發生變化,夜間成像更明亮,逆光情況下的強光抑制,從而保證目標圖像特征的環境適應性。但是,極端天氣環境,如大雨天、冰雪天、大霧天、暗光條件依然是視覺傳感器的短板。然而,視覺傳感器成本非常低廉,因而成為智能駕駛系統必不可少的選擇。視覺感知傳感器的優劣勢雷達如圖6所示 (數值越大,性能越好)。
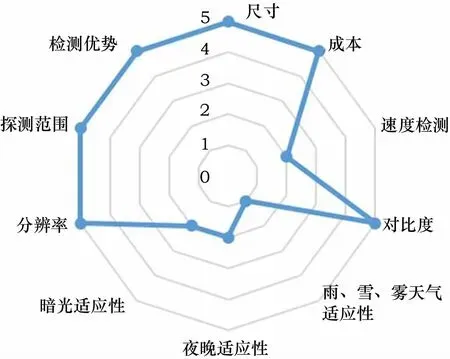
圖6 視覺傳感器特性雷達圖
相對于視覺而言,毫米波雷達的探測范圍與視覺類似,目前性能比較優秀的毫米波雷達及視覺均能做到超過200m,毫米波雷達的成本比視覺略高,但總體而言,價格依然相對低廉,完全可以用于量產落地。毫米波雷達的優勢也非常明顯,如全天候的特性。當然,毫米波探測到的目標只能輸出一個點,無法判斷目標的類型,也無法實現字符識別,如限速標識牌的識別。同樣的,其特性雷達圖如圖7所示。
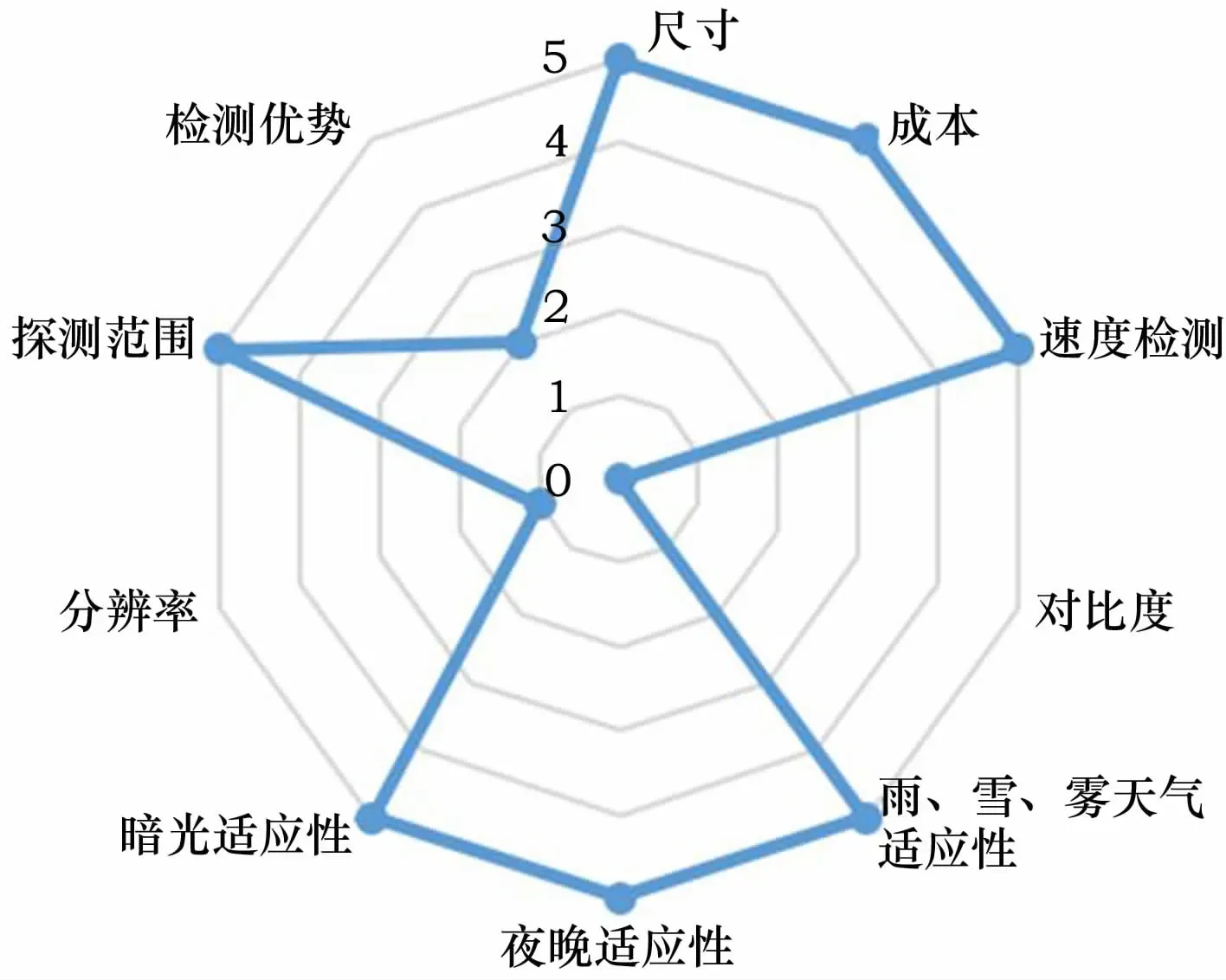
圖7 毫米波雷達特性雷達圖
對于激光雷達而言,其分辨率與其線數相關,如Velodyne就發布了128線的激光雷達,使得3D點云更為稠密,分辨率更高。但眾所周知,32線以上激光雷達的成本非常高,其量產良品率也偏低,目前使用激光雷達的廠商基本是處于研發階段的自動駕駛車輛。當然,其優勢也非常明顯,尤其在厘米級別的探測精度、3D環境感知這兩個方面。激光雷達的性能雷達圖如圖8所示。
3 傳感器選型
物流領域的卡車等商用車自動輔助駕駛由于對安全的首要需求,或許更強調快速落地量產。尤其是車輛從OEM廠商交到下游的運營商客戶手中,車隊運營方的需求更為明顯。同時,商用車受政策影響較大,尤其是兩客一危行業,《機動車運行安全技術條件》[5]以及陸續出臺的ADAS相關功能國標對商用車影響更大。
據報道[8],目前中國重型卡車保有量超過500萬輛,輕中型卡車保有量超過1400萬輛,市場規模超過5萬億人民幣,已成為世界第一大的公路運輸市場。巨大的中國物流運輸市場和政策引導,無疑也將激活商用車ADAS及自動駕駛市場需求。
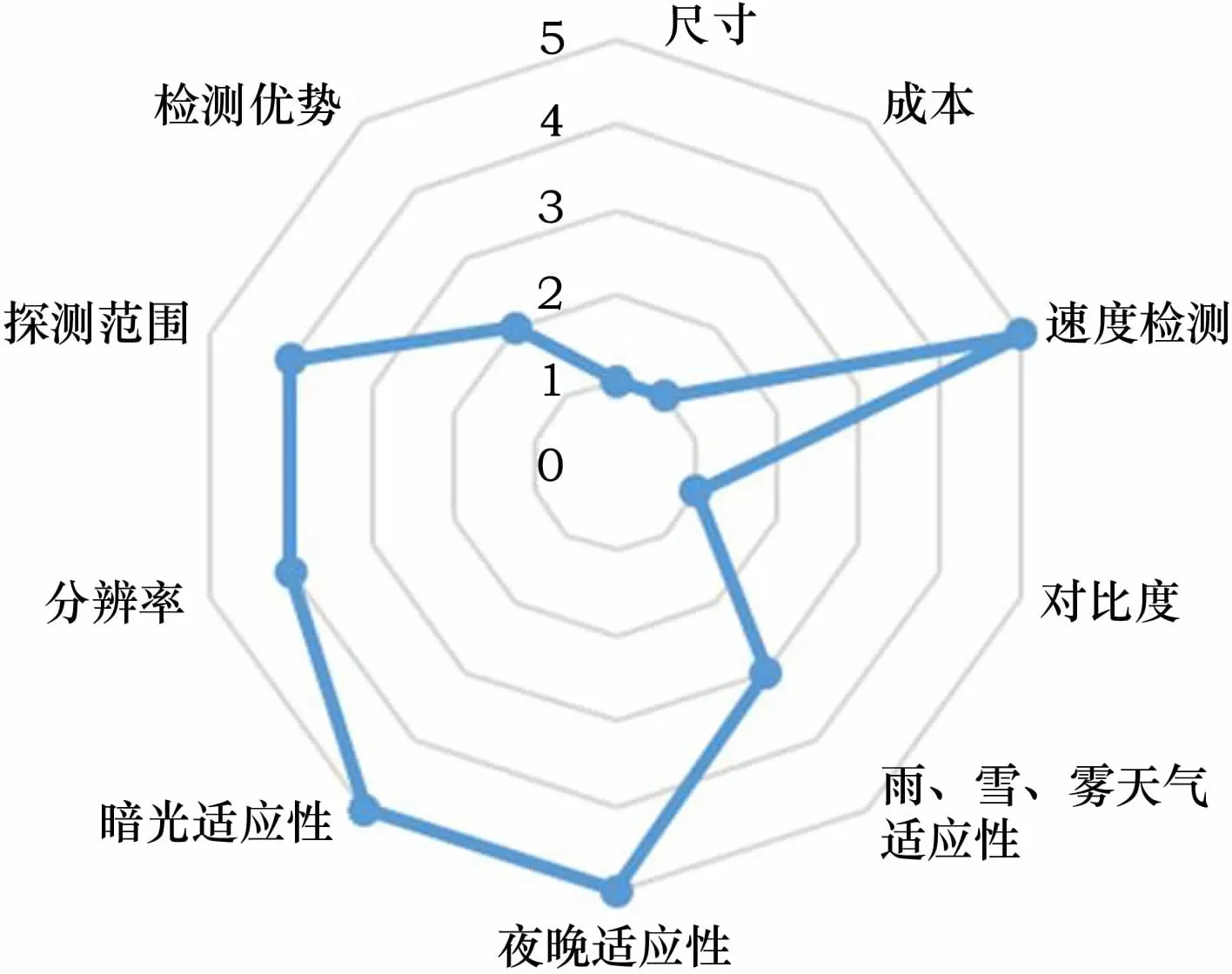
圖8 激光雷達特性雷達圖
就現階段而言,商用車在政策框架之下的落地應用主要處于輔助駕駛層面,商用車自動駕駛技術更多停留在研發與驗證階段。商用車輔助駕駛系統的主要應用包括前車碰撞預警系統、車道偏離預警系統、駕駛員疲勞監控系統以及盲區探測這幾個方面,尤其是盲區探測相對于乘用車而言,需求更為旺盛。基于此,考慮系統性能的需求,一般采用傳感器融合的方式。綜合視覺和毫米波雷達的優勢,取長補短,得到的融合方案相較于單傳感器的優勢見表1(●表示性能優越,●表示性能處于平均水平,○表示性能不佳)。

表1 傳感器融合性能對比
由表1可知,視覺和毫米波雷達融合方案,在各方面的性能都達到比較優越的程度。因此,針對不同的需求,傳感器選型推薦如下。
1)雙預警系統:由于預警功能起到提醒駕駛員的作用,因此其功能本身不會給駕駛員帶來安全隱患。考慮成本需求,可選擇單目攝像頭作為系統的感知傳感器。如果需要性能更為優越,視覺和毫米波雷達是更好的選擇。
2)AEB系統:自動緊急制動系統涉及到車輛控制,必須嚴格把控感知的精度,尤其需要控制誤操作的發生,避免其干擾駕駛員正常駕駛,甚至導致事故的發生,因此AEB系統最好選擇更為可靠的融合方案。
3)BSD系統:盲區探測從功能完備程度來講,有僅考慮移動目標探測的系統,這種情況可僅采用毫米波雷達的方案;如果需要對目標進行分類且需要同時對靜止和移動目標進行檢測,則需要選擇視覺傳感器;同樣的,考慮全天候特性及系統的可靠性,可采用融合方案。
4)DMS系統:駕駛員狀態監控,如抽煙、打電話、閉眼、打哈欠,這些特征無法采用毫米波雷達進行,必須采用視覺傳感器,同時考慮夜間使用的問題,市面上一般采用近紅外攝像頭滿足不同光照條件下的系統性能要求。
4 結論
本文對輔助駕駛系統的特性進行了對比分析,并根據目前商用車法規項和痛點需求,分別給出了傳感器選型建議,得到的結論如下。
1)視覺、毫米波雷達、激光雷達有各自的優勢,綜合考慮成本和性能的要求,視覺的綜合表現目前最為適合多種輔助駕駛功能的應用落地。
2)涉及碰撞預警類的輔助駕駛系統,可以單獨采用視覺或毫米波雷達,涉及非障礙物類別檢測需求的系統,至少需要用到視覺傳感器。
3)基于感知傳感基礎上的車輛控制,對傳感器性能要求更為嚴格,有必要考慮多傳感器融合,以提升感知可靠性和執行有效性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
