水下發(fā)射超空泡射彈對UUV平臺姿態(tài)影響分析
2020-07-22 03:35:32魯春佳趙澤鵬
數(shù)字海洋與水下攻防 2020年3期
魏 平,侯 健,魯春佳,趙澤鵬,榮 里
(海軍工程大學(xué),湖北 武漢 430033)
0 引言
為提高水下攻防作戰(zhàn)能力,各軍事強(qiáng)國都致力于高速水中兵器的研究。超空泡減阻技術(shù)可大幅減小水中兵器的運動阻力,有效提高運動速度和射程,具有廣闊的應(yīng)用前景[1]。超空泡射彈武器是應(yīng)用超空泡減阻技術(shù)研制的一種新概念武器,能夠突破普通射彈水中運動極限,有效打擊水雷等水下目標(biāo)。美國、俄羅斯分別研制了基于機(jī)載平臺及單兵作戰(zhàn)的超空泡射彈武器——機(jī)載快速滅雷系統(tǒng)和水下突擊步槍,但基于水下平臺發(fā)射的超空泡射彈武器及其平臺適應(yīng)性研究鮮有報道[2-5]。隨著UUV的快速發(fā)展,UUV平臺搭載水下超空泡高速射彈武器成為可能,超空泡射彈武器水下發(fā)射時伴隨強(qiáng)烈的振動沖擊,研究沖擊力特性及其對UUV平臺的影響規(guī)律具有重要的現(xiàn)實意義。本文主要針對基于水下發(fā)射平臺的超空泡射彈武器開展平臺適應(yīng)性研究,初步探索水下超空泡射彈武器在不同方位、不同角度發(fā)射時對UUV平臺姿態(tài)的影響規(guī)律。
1 建立模型
1.1 坐標(biāo)系
建立如圖1所示的固定坐標(biāo)系(o0x0y0z0)和移動坐標(biāo)系(oxyz)。固定坐標(biāo)系的原點o0可以取水平面內(nèi)任意一點,o0z0軸垂直于水平面指向地心,o0x0軸為水平面任意方向,o0x0y0平行于水平面,符合左手規(guī)則。移動坐標(biāo)系的原點o在航行器的質(zhì)心,其坐標(biāo)軸ox、oy、oz分別是經(jīng)過的橫切面、橫剖面、縱中剖面的交線,ox軸指向航行器艉部,oz軸處在航行體對稱面垂直于ox軸指向下方,oy軸垂直于oxz面,符合左手規(guī)則。
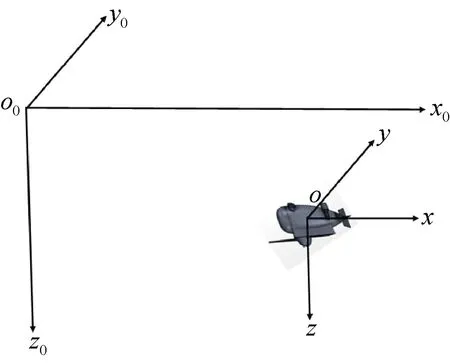
圖1 坐標(biāo)系Fig. 1 Coordinate system
1.2 仿真模型
應(yīng)用STAR CCM+ CFD軟件建立水下超空泡射彈武器及搭載UUV航行器平臺的六自由度仿真模型[6-8]。如圖 2所示,創(chuàng)建長方體背景區(qū)域,6個表面按塊分割,分別設(shè)置為速度進(jìn)口、壓力出口、頂部、底部、側(cè)面和系統(tǒng)邊界,將長方體、包面及背景過度區(qū)執(zhí)行布爾減運算操作,以加快計算收斂速度,采用多面體網(wǎng)格劃分。
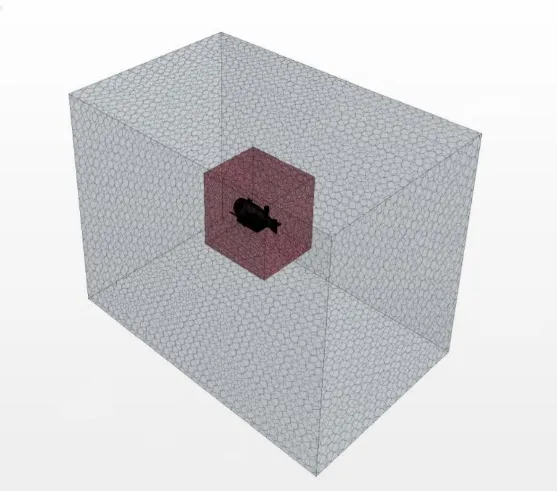
圖2 仿真模型Fig. 2 Simulation model
1.3 邊界條件
水下發(fā)射超空泡射彈武器對搭載平臺姿態(tài)的影響主要是超空泡射彈武器發(fā)射后坐力載荷的作用。為方便計算,將后坐力曲線做離散化處理,如圖3所示,后坐力總作用時間為4.2 ms,其中1.4 ms時后坐力最大為 5 500 N,2.8 ms時后坐力降至500 N,4.2 ms時降至最低值50 N。水下超空泡射彈武器發(fā)射時的俯仰角為身管與平面oxy的夾角,向下為正;方位角為身管在oxy平面投影與ox軸負(fù)方向的夾角,向左為正。為減少運算次數(shù),分別選擇具有代表性的 0°、90°的俯仰角和 0°、30°的方位角進(jìn)行仿真計算。

圖3 后坐力載荷Fig. 3 Recoil load
2 仿真分析
分別選取 0°、90°的俯仰角和 0°、30°的方位角4種工況下發(fā)射超空泡射彈進(jìn)行仿真計算。
1)0°俯仰角、0°方位角發(fā)射。
航行器平臺各軸速度變化仿真結(jié)果如圖 4所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺x軸速度、z軸速度快速上升,在0.004 2 s分別達(dá)到0.059 7 m/s和0.054 57 m/s,y軸速度稍有變化,在 0.004 2 s增長至-0.010 1 m/s,見圖 4(a);隨后,彈丸出炮口,后坐力消失,平臺x軸速度于0.352 s減小至0,z軸速度于0.318 s減小至0,y軸速度于0.091 s減小至0,見圖4(b)。
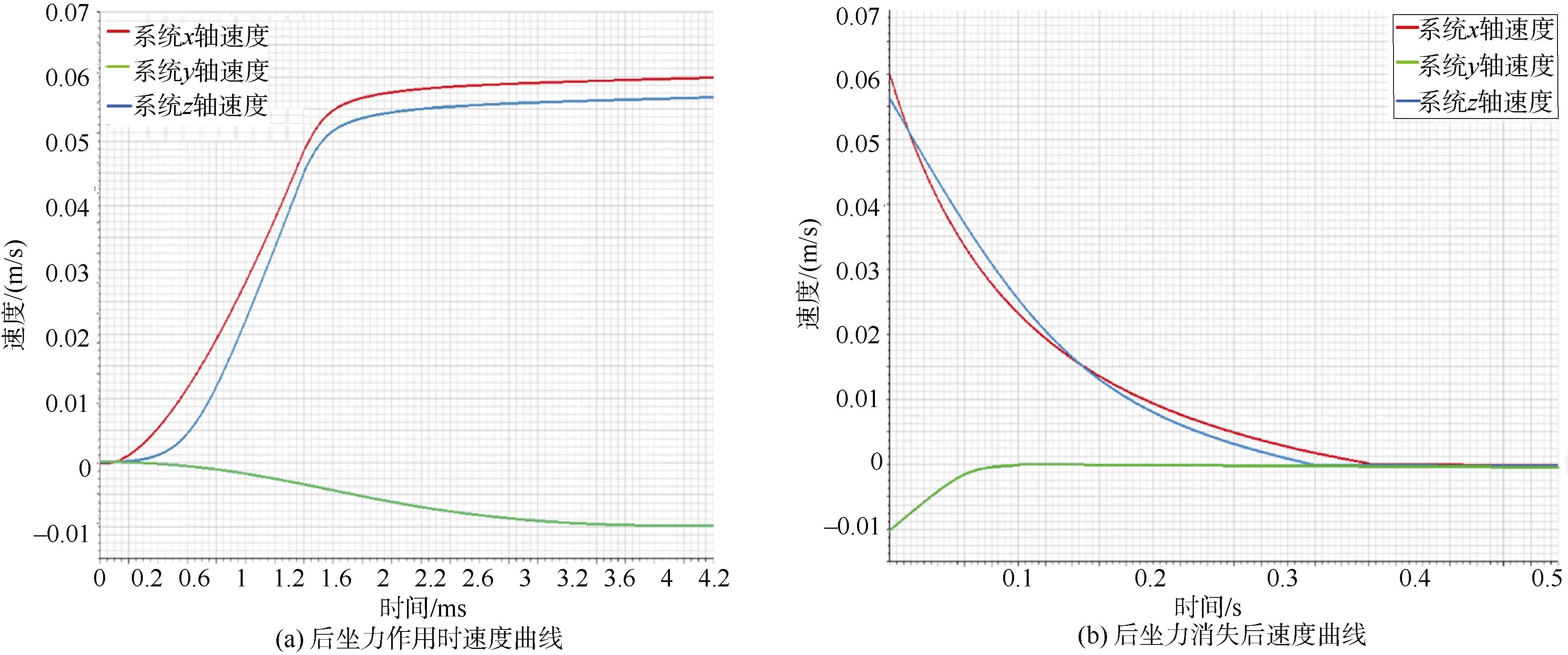
圖4 0°俯仰角、0°方位角發(fā)射平臺各軸速度隨時間變化曲線Fig. 4 Curves of axes’ speed of launch platform under 0° pitch angle and 0° azimuth angle changing with time
航行器平臺各軸角速度變化仿真結(jié)果如圖 5所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺x軸角速度快速上升,在 0.004 2 s達(dá)到0.121 rad/s,y軸、z軸角速度稍有變化,見圖 5(a);隨后,彈丸出炮口,后坐力消失,x軸角速度逐漸振蕩減小,于0.390 s減小至0,y軸角速度于0.059 3 s減小至0,z軸減速度逐漸振蕩減小,于0.257 s減小至0,見圖5(b)。
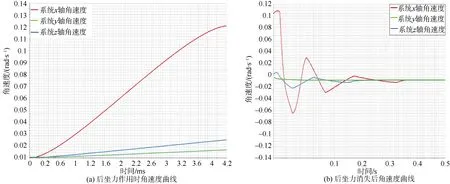
圖5 0°俯仰角、0°方位角發(fā)射平臺各軸角速度隨時間變化曲線Fig. 5 Curves of axes’ angular speed of launch platform under 0° pitch angle and 0° azimuth angle changing with time
2)0°俯仰角、30°方位角發(fā)射。
航行器平臺各軸速度變化仿真結(jié)果如圖 6所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺x軸速度、y軸、z軸速度快速上升,在0.004 2 s分別達(dá)到 0.046 1 m/s、0.049 53 m/s、0.029 1 m/s,見圖6(a);隨后,彈丸出炮口,后坐力消失,平臺x軸速度于0.272 s減小至0,y軸速度于0.31 s減小至 0,z軸速度于 0.158 s減小至 0,見圖 6(b)。
航行器平臺各軸角速度變化仿真結(jié)果如圖 7所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺x軸角速度快速上升,在 0.004 2 s達(dá)到0.145 1 rad/s,y軸、z軸角速度稍有變化,見圖 7(a);隨后,彈丸出炮口,后坐力消失,x軸角速度逐漸振蕩減小,于0.441 s減小至0,見圖7(b)。
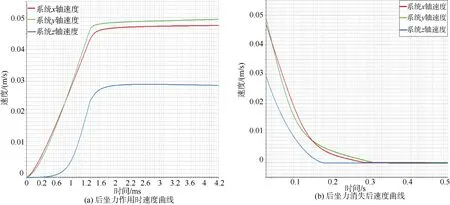
圖6 0°俯仰角、30°方位角發(fā)射平臺各軸速度隨時間變化曲線Fig. 6 Curves of axes’ speed of launch platform under 0° pitch angle and 30° azimuth angle changing with time
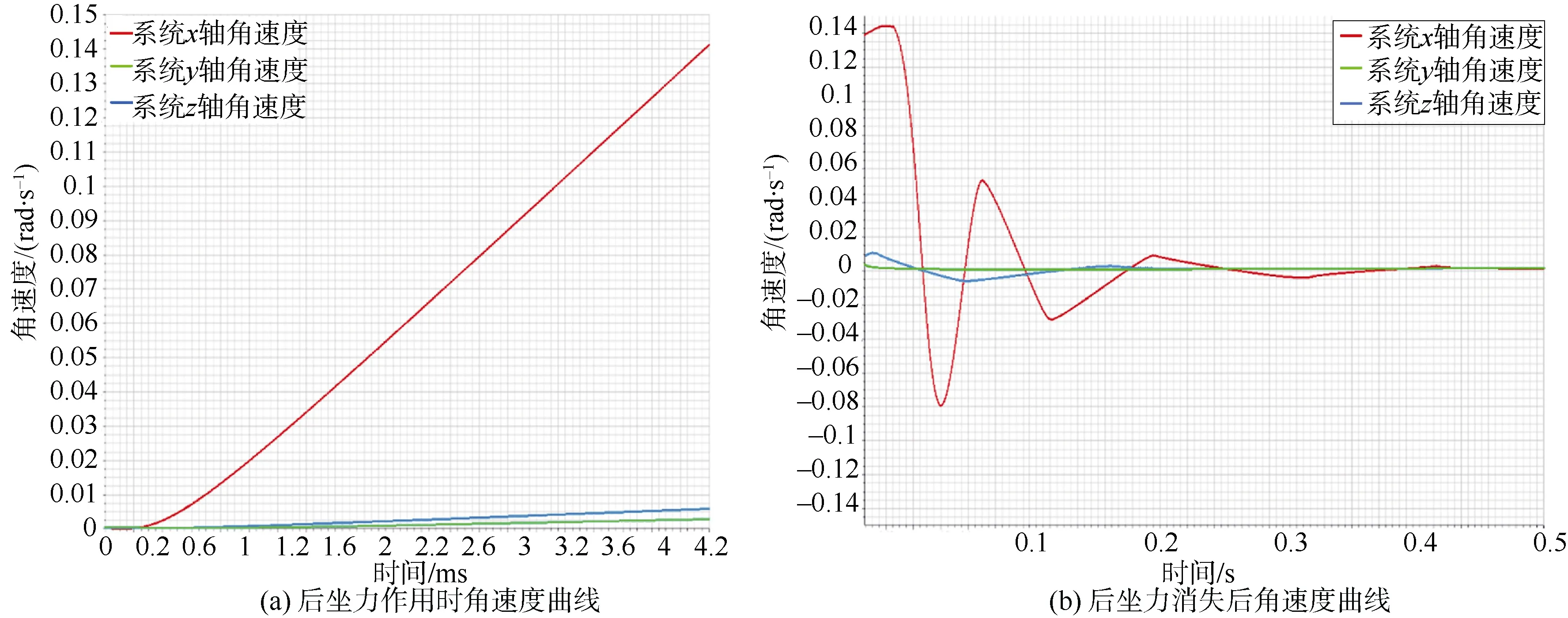
圖7 0°俯仰角、30°方位角發(fā)射平臺各軸角速度隨時間變化曲線Fig. 7 Curves of axes’ angular speed of launch platform under 0° pitch angle and 30° azimuth angle changing with time
3)90°俯仰角、0°方位角發(fā)射。
航行器平臺各軸速度變化仿真結(jié)果如圖 8所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺z軸速度快速變化,在0.004 2 s達(dá)到-0.032 54 m/s,x軸速度和y軸速度基本不變,見圖8(a);隨后,彈丸出炮口,后坐力消失,平臺z軸速度于0.202 3 s減小至0,見圖8(b)。
航行器平臺各軸角速度變化仿真結(jié)果如圖 9所示。超空泡射彈發(fā)射后,在后坐力的作用下, 平臺x軸角速度快速上升,在 0.004 2 s達(dá)到0.191 4 rad/s,y軸、z軸角速度稍有變化,見圖 9(a);隨后,彈丸出炮口,后坐力消失,x軸角速度逐漸振蕩減小,于0.465 s減小至0,見圖9(b)。
4)90°俯仰角、30°方位角發(fā)射。
航行器平臺各軸速度變化仿真結(jié)果如圖10所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺y軸和z軸速度快速變化,在0.004 2 s分別達(dá)到0.025 3 m/s和-0.030 2 m/s,x軸速度基本不變,見圖10(a);隨后,彈丸出炮口,后坐力消失,y軸速度于0.146 s減小至0,z軸速度于0.196 s減小至0,見圖10(b)。
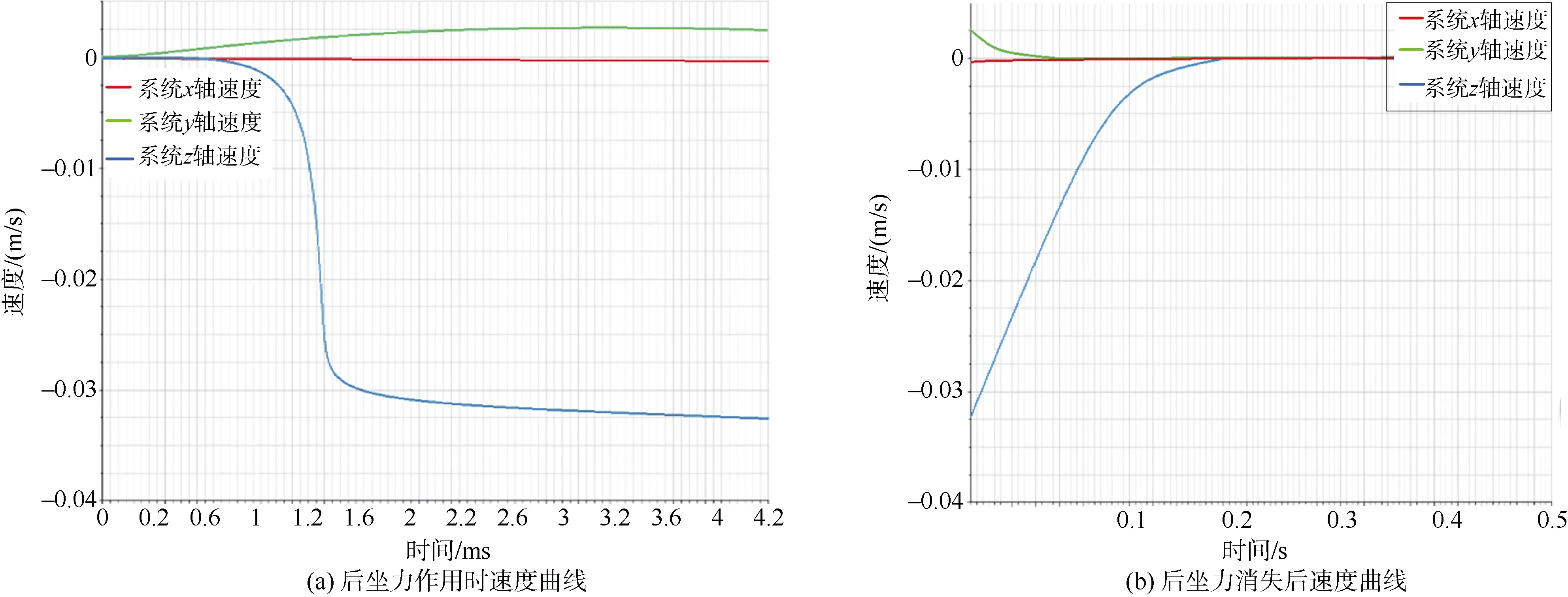
圖8 90°俯仰角、0°方位角發(fā)射平臺各軸速度隨時間變化曲線Fig. 8 Curves of axes’ speed of launch platform under 90° pitch angle and 0° azimuth angle changing with time
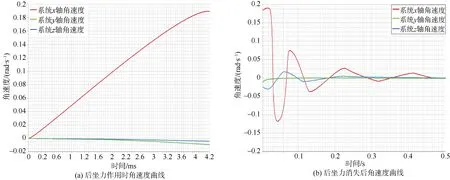
圖9 90°俯仰角、0°方位角發(fā)射平臺各軸角速度隨時間變化曲線Fig. 9 Curves of axes’ angular speed of launch platform under 90° pitch angle and 0° azimuth angle changing with time
圖10 90°俯仰角、30°方位角發(fā)射平臺各軸角速度隨時間變化曲線Fig. 10 Curves of axes’ speed of launch platform under 90° pitch angle and 30° azimuth angle changing with time
航行器平臺各軸角速度變化仿真結(jié)果如圖 11所示。超空泡射彈發(fā)射后,在后坐力的作用下,平臺x軸角速度快速上升,在 0.004 2 s達(dá)到0.184 8 rad/s,y軸、z軸角速度基本不變,見圖11(a);隨后,彈丸出炮口,后坐力消失,x軸角速度逐漸振蕩減小,于 0.459 6 s減小至0,見圖11(b)。
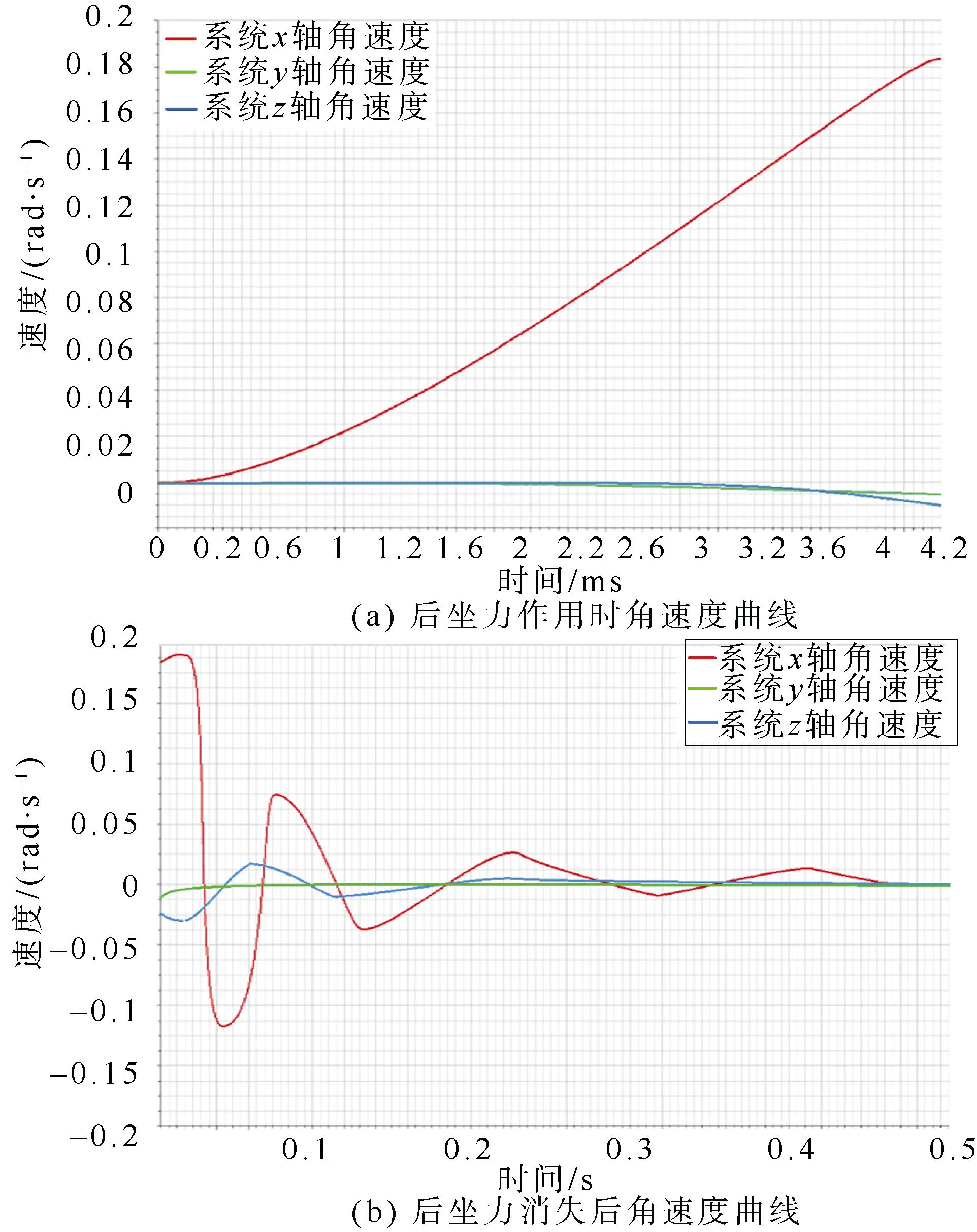
圖11 90°俯仰角、30°方位角發(fā)射平臺各軸角速度隨時間變化曲線Fig. 11 Curves of axes’ angular speed of launch platform under 90° pitch angle and 30° azimuth angle changing with time
3 結(jié)束語
通過對超空泡射彈武器在 90°俯仰角 30°方位角、90°俯仰角 0°方位角、0°俯仰角 30°方位角、0°俯仰角 0°方位角 4種狀態(tài)下發(fā)射的仿真結(jié)果可以看出:由于水下發(fā)射時超空泡射彈武器后坐力作用時間很短(4.2 ms),同時受到水阻力的影響,搭載平臺各軸的速度和角速度變化很小(速度最大為0°俯仰角0°方位角發(fā)射時0.059 7 m/s,角速度最大為90°俯仰角0°方位角發(fā)射時0.191 4 rad/s),且都可在0.5 s內(nèi)恢復(fù)穩(wěn)定,水下發(fā)射超空泡射彈對搭載UUV平臺姿態(tài)的影響很小。
