交互機器人技術與發展*
2020-07-19 14:28:52潘克剛齊寶峰王欣婷蘇耀丁
通信技術 2020年6期
齊 帥,潘克剛,齊寶峰,王欣婷,蘇耀丁
(1.海軍研究院,北京 100070;2.中國人民解放軍陸軍工程大學 通信工程學院,江蘇 南京 210007)
0 引言
交互機器人是指利用人機交互技術能夠和人類指揮端實現交互的終端機器人。它具有信息傳輸形式更加多樣、擁有更加自主的語音交流和可視化界面以及人工智能程度高等特點。初代工廠機器人與之相比,只能夠接受人類控制端的指令,執行特定的機械動作,雖然實現了控制端到機器人端的信息傳輸,卻沒有很好地實現機器人端對控制端的信息反饋。從這種意義上說,初代工廠機器人并不能稱之為交互機器人。交互機器人的實現不僅要有控制端的命令傳向機器人端,也要有機器人端向控制端的信息回傳,體現機器人和控制端的交互功能。目前,交互機器人越來越得到人們的青睞,成為機器人發展的重要方向。
1 研究現狀
隨著科學技術的不斷發展進步和人們對高科技產品需求的增強,機器人朝著具有交互功能的高程度人工智能方向迅猛發展。近幾十年來,交互機器人的發展應用對人類社會產生了重要影響,下面將重點介紹幾種具有典型代表意義的交互機器人。
1966年,為了模仿心理醫生與病人聊天的過程,約瑟夫·魏澤鮑姆(Joseph Weizenbaum)開發了聊天機器人ELIZA。聊天機器人使用關鍵詞匹配技術,回復規則雖然簡單,但是很好地體現了人機交互技術的特點。
1985 年,Kwoh 利用機器人作為助手進行外科手術,開創了人機交互技術應用于醫學臨床手術的先河,也為后來更先進的基于虛擬現實的遠程手術的發展奠定了基礎。醫生對機器人的操控和機器人端攝像頭對病人情況的回傳,是交互機器人的典型特征。
1997 年,“旅居者”探測器(Sojourner Rover)登陸火星,局限于當時的技術水平,“旅居者”探測器的體型較小,最高的行駛速度也僅為0.02 英里,但是依然成功拍攝了550 張照片,為人類對火星的科學探索任務積累了重要素材。隨后,“勇氣號”等探測器對火星進行了更多次探索,此類交互機器人大大加快了人類對外太空探索的步伐。
2012 年,名為“R2”的宇航員機器人首次被送入國際空間站。此人形機器人的活動范圍接近實際宇航員,可以代替人類感知太空的情況,降低人員傷亡的可能性。它感知到的太空的各種性能指標對地面的回傳也是機器人交互功能的具體體現。
對于交互機器人的發展,很多與之共同進步的硬件設備作出了突出貢獻,其中問世不久的Kinect可以稱得上交互機器人的又一次革命。在現有文獻中,文獻[1]給出了基于手勢和語音識別的人造機器人導航系統;文獻[2]描述了利用Kinect 遠程操作Nao 機器人的開發方法;文獻[3]描述了一種基于Kinect 傳感器構建本地不確定網格圖的移動機器人。
在幾十年的時間里已經出現了眾多不同類型的交互機器人,服務于社會的方方面面。從近幾年的研究成果來看,交互機器人的發展勢頭依然強勁。
2 關鍵技術
隨著科技的發展進步和軟硬件的更新換代,更多先進的技術被交互機器人應用,包括各種新型的傳感器。另外,智能交互系統也在交互機器人中扮演著極其重要的角色。下面對交互機器人的關鍵技術進行具體介紹。
2.1 傳感器
傳感器是交互機器人發展過程中的重要組成部分,它是機器人的感官系統。利用傳感器,交互機器人可以對周圍環境有一個客觀準確的感知。
2.1.1 傳統典型傳感器
激光雷達傳感器可以使用多普勒效應測量物體的相對速度。使用此傳感器,交互機器人可以快速準確地實現信息回傳。
新型的電荷耦合器件(Charge Couple Device,CCD)可用于圖像傳感器,并且具有不需要預熱、體積小、重量輕以及造價低等優點。所以,使用基于CCD 器件的圖像傳感器可以使交互機器人的仿人性能更好,信息交互時用戶體驗更佳。
目前研制的新型納米復合材料原位寬帶超聲波傳感器,以炭黑作為納米填料和以聚偏二氟乙烯為基體。這種傳感器重量輕、體積小且具有高靈敏度和超快響應能力,被證明具有與商業壓電超聲波換能器相當的靈敏度和精度,且在適應曲面結構表面方面具有更大的靈活性[4]。超聲波傳感器與上述其他傳感器一起為推動交互機器人的發展進步起到了重要作用。
2.1.2 新型Kinect 傳感器
與傳統集成在機器人端的傳感器不同,Kinect在控制端使用,通過數據采集、處理并發送給機器人端來實現人機交互功能。
Kinect 使用由微軟劍橋研究院研發的基于深度圖像的人體骨骼追蹤算法,不需要使用任何道具便可完成整個動作的識別與捕捉。使用Kinect 的優勢在于:①機器臂脫離了傳統的固定位置的限制,可以隨著控制員在設定的符合人體學的范圍內隨意映射動作,從而完成許多設計的復雜任務;②實際操作界面流暢,通過實際操作和計算,可以設置動作跟隨時長,使得延遲誤差很小又不影響指令的更新;③通過在算法中加入動作鎖,可以很好地避免機器人在操作者不知情的情況下出現一些超出預期設計的動作,從而危害機器人本身;④程序的可操作性很強,指令的添加和設計清晰,可以隨時進行新的指令和算法的編輯而不影響整體的框架和流程。
有實驗結果表明,Kinect 可以過濾一些人的非自愿運動,也證實了Kinect 具備作為運動障礙者輔助技術的潛力[5],使得Kinect 在交互機器人上的使用具有重要意義。
2.2 智能交互系統
機器人利用傳感器可以獲取外界信息,實現信息的輸入。為了交互功能的實現,完成信息的閉環傳輸,智能交互系統是極其重要的環節。
目前,已經出現許多不同的智能交互系統。蒲巧[6]將能夠用來進行英語對話的機器人語言生成當作研究對象,利用基于TF-IDF 的雙向交互機器人的語言自動生成方法,尋找到機器人回復人類語音聊天的最佳選擇。周菲[7]等人采用滑動時間窗的方法對原始sEMG 信號設計短時能量閾值進行信號活動段始末點的確定,從而抑制了動作剛執行時趨勢段對識別結果的影響,然后利用時域統計分析對sEMG 信號進行特征分析,并提出了融合加速度特征信息和sEMG 信號的方法建立5 種手勢的分類模型,實現了融合多源信息的手勢智能交互系統。曹亞男[8]等人以研究開發一款可實現學習型智能交互的軟件為目的,在人機交互的基礎上,利用JAVA等編程語言實現文字、語音、表情三方面的交互,同時更具有自學習的功能,并將自學習反過來利用到交互系統,完成了更加智能化的交互系統的實現。
雖然智能交互系統的實現方法各有不同,但是其核心目的都是在特定的功能上實現人機智能交互的功能,達到信息的閉環傳輸。
3 組成和基于Kinect 的信息交互
3.1 組 成
目前交互機器人大多采用模塊化設計。一般來說,交互機器人可以有以下5 個模塊組成,分別為驅動模塊、機械結構模塊、控制模塊、無線通信模塊和交互信息采集模塊。
驅動模塊是機器人的關節,為機器人提供動能;機械結構模塊是機器人的骨肉,構成了機器人的實物基礎;控制模塊是機器人的大腦,用以處理信息和發送指令;無線通信模塊是機器人的耳朵和嘴巴,用以各分系統間的信息傳輸;交互信息采集模塊是機器人的眼睛和其他感覺器官,用以感知外界信息。通過這些模塊使得機器人能夠通過人的動作指示,接受指令,按相應的指令完成任務。交互系統總體功能實現框圖如圖1 所示。
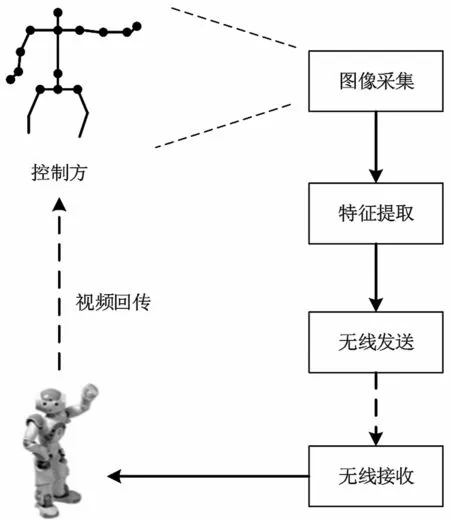
圖1 交互系統總體功能實現
3.2 基于Kinect 的信息交互
隨著Kinect 的應用發展,基于Kinect 的軟件平臺被廣泛應用。在系統軟件設計時,系統軟件總體結構隨著信息流的流動方式而改變。
在圖2 的信息流中,首先利用Kinect 內置攝像頭進行信息數據采集,提取骨骼點信息后傳送到處理器端進行數據信息處理。指揮端和機器人端利用無線聯接,二者使用統一的通信協議,可以利用衛星或者無線WiFi等手段將數據信息傳送到手機等,同時信息也會回傳到控制端,從而實現完整的信息交互過程。
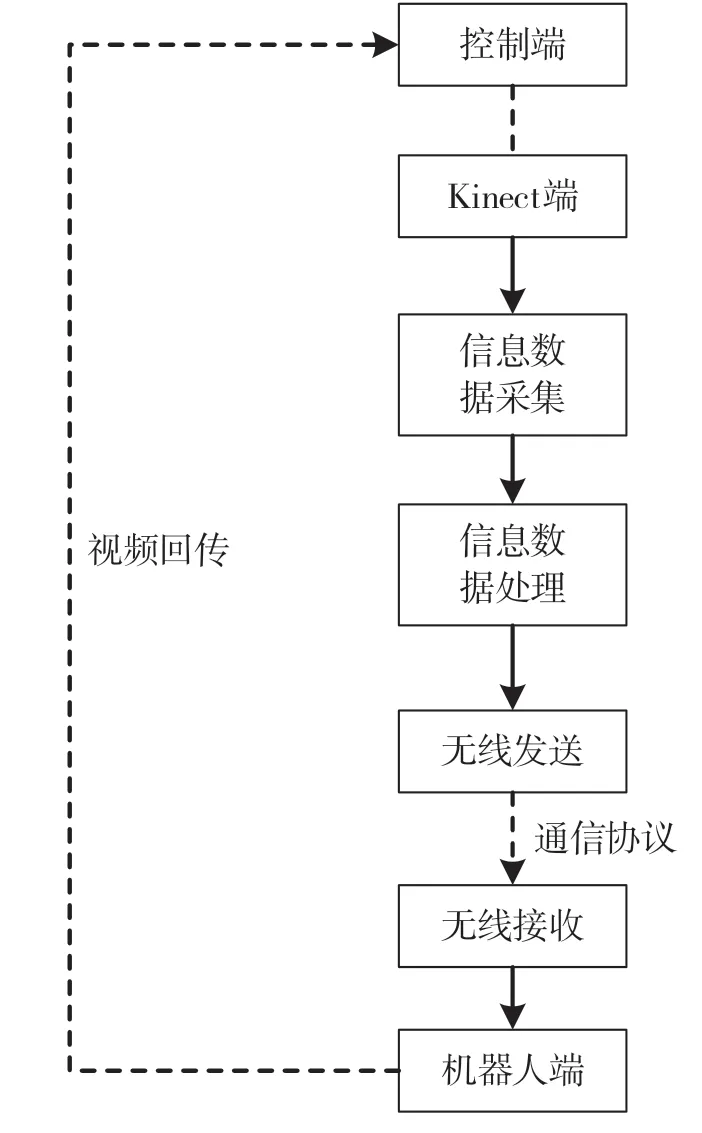
圖2 系統信息流
4 交互機器人的發展前景
目前,雖然交互機器人在國內外已有頗多研究成果,但至少在以下幾個方面依然具有廣闊的發展空間。
4.1 信息處理能力
目前的交互機器人無論是談話機器人、掃地機器人還是輔導小孩子的玩耍機器人,接收信息的形式都比較單一,對信息的理解能力還很有限。增強機器人的信息處理能力能夠使其實現更多的功能,優化用戶體驗,更好地體現人機交互功能。
4.2 傳感技術和集成技術
雖然目前的傳感器技術已經比較成熟,但是在現有的基礎上研制更靈敏、更先進、更小巧、更智能的傳感器,可以推動交互機器人更加精確地感知周圍環境。此外,提高集成技術能夠在有限的體積上集成更多的元器件,實現更多的功能,有助于增強對信息的提取、處理和傳輸能力。
4.3 機器人網絡化
在即將步入的物聯網時代,萬物互聯是大勢所趨。所以,將交互機器人由單一的、有限功能的個體組成功能強大的網絡,使人類和機器人在同一個網絡里進行信息交互,甚至由機器人和其他物品進行信息交互,是未來需要不斷為之努力奮斗的方向。
4.4 深度學習能力
自主判斷、推理、規劃是智能交互機器人的主要發展方向,而深度學習是實現機器人智能化的重要途徑。阿法狗戰勝柯潔便是深度學習在機器人智能化方面的重大成就,未來的交互機器人需要更加強大的深度學習能力。
5 結語
經過幾十年的發展,交互機器人已經取得了眾多璀璨的成果,其存在的技術難題使得一批批技術人員為之不懈奮斗,由此推動了交互機器人技術不斷向前發展。本文介紹了交互機器人的研究現狀,概括了交互機器人所應用的關鍵技術,包括傳感器、組成模塊以及基于Kinect 的信息傳輸方式等。在交互機器人領域,更多更加大膽的創新精神正在被喚醒,新的技術不斷涌現,交互機器人技術的發展必然帶給人類社會更大的便利,推動著人類社會不斷向前發展。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
中國科技論壇(2017年7期)2017-07-25 08:49:53
中華手工(2017年2期)2017-06-06 23:00:31
媽媽寶寶(2017年2期)2017-02-21 01:21:24
國際漢語學報(2016年1期)2017-01-20 08:21:20
中外會展(2014年4期)2014-11-27 07:46:46
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:32:55
中國中醫藥現代遠程教育(2014年16期)2014-03-01 04:28:54
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
