基于移動激光掃描的靶標(biāo)葉面積計算方法
2020-07-07 06:10:36李秋潔袁鵬成
農(nóng)業(yè)機械學(xué)報 2020年5期
關(guān)鍵詞:測量
李秋潔 袁鵬成 鄧 賢 茹 煜
(南京林業(yè)大學(xué)機械電子工程學(xué)院,南京210037)
0 引言
變量對靶施藥技術(shù)已在果園、苗圃病蟲害防治中成功應(yīng)用[1],其基礎(chǔ)是對靶標(biāo)的精準探測與信息提取[2-3]。激光雷達(Light detection and ranging,LiDAR)技術(shù)能快速獲取樹木完整形貌,提高測量效率,已廣泛應(yīng)用于樹木信息提取[4-6]和三維重建[7]。將靶標(biāo)冠層離散化為規(guī)則幾何體,通過LiDAR 實時測量樹冠外緣距離,結(jié)合預(yù)設(shè)的樹行距離及其他系統(tǒng)參數(shù),可估算出冠層體積,據(jù)此調(diào)節(jié)施藥劑量,使藥液在冠層內(nèi)部均勻沉積[8-9]。上述方法適用于冠層結(jié)構(gòu)緊密、葉片交錯重疊程度大的靶標(biāo)。對于疏枝果園,為增加果樹產(chǎn)量、提高果實品質(zhì),果樹冠層被修剪得較為稀疏,枝條的分支角度較大,葉片重疊程度低,此時難以準確計算冠層體積,更適合用冠層葉面積作為噴霧依據(jù)。
基于LiDAR 的葉面積測量主要研究葉面積指數(shù)(Leaf area index,LAI)、葉面積密度(Leaf area density,LAD)和總體葉面積(Total leaf area,TLA)等冠層參數(shù)。LAI 是單位土地面積的葉片總面積,通常從冠層點云數(shù)據(jù)中提取透光率、消光系數(shù)等參數(shù)來計算[10-11],而變量對靶施藥需要測量噴霧方向上的葉片總面積,因此并不適合。LAD 為單位體積內(nèi)的葉片總面積,先將體素化后的冠層劃分為多個橫切面或縱切面,然后計算激光束與冠層切面的接觸頻率,利用激光束方向與葉傾角進行校正,得到冠層切面的LAD[12-13]。LAD 計算較為復(fù)雜,并且需要乘以冠層體積才能得到葉面積,不滿足變量對靶施藥實時測量的需求。TLA 為冠層的總體葉面積,常采用點云數(shù)進行估計。文獻[14]證明了冠層點云數(shù)與葉面積之間為線性關(guān)系;文獻[15]采用高斯函數(shù)、多項式函數(shù)與指數(shù)函數(shù)擬合了0.2 m ×0.2 m ×0.8 m 長方體內(nèi)的點云數(shù)與葉片數(shù)關(guān)系,擬合優(yōu)度達0.936 4;文獻[16 -17]隨機選擇一部分冠層點云數(shù)據(jù),利用三角剖分算法生成的三角形面積估計點云個數(shù)與葉面積的比率,同時,考慮到測量距離對點云密度的影響,按距離對冠層分層,分別計算葉面積。
基于2D LiDAR 的移動激光掃描(Mobile laser scanning,MLS)技術(shù)已在靶標(biāo)冠層體積測量中成功應(yīng)用[9,18-20],在靶標(biāo)葉面積測量上也取得了一些研究成果[14-15]。針對疏枝果園的變量對靶施藥問題,研究基于MLS 技術(shù)的靶標(biāo)葉面積計算方法,進而研究TLA 的計算方法。已有研究[15-17]表明,LiDAR探測距離和移動速度對點云密度有較大影響。本文分析上述因素與MLS 點云分辨率的關(guān)系,對點云數(shù)進行校正,以提高葉面積測量精度,為變量對靶施藥提供基礎(chǔ)數(shù)據(jù)。
1 材料與方法
1.1 移動激光掃描測量
試驗采用日本Hokuyo 公司生產(chǎn)的UTM-30LX型2D 激光雷達(LiDAR),如圖1 所示。最大測量距離30 m,掃描范圍270°,掃描周期25 ms,角度分辨率0.25°,每次掃描返回以毫米為單位的1 081 個測量點,用4 個字節(jié)的整數(shù)表示。
MLS 測量系統(tǒng)如圖2 所示,將LiDAR 盲區(qū)向下搭載在長度為1 m 的絲桿滑臺上,由STC89C52 單片機控制FM576SFD04 型步進電機帶動滑臺在絲桿上以9.7 mm/s 的速度勻速移動,計算機通過串口讀取LiDAR 數(shù)據(jù),獲取垂直于LiDAR 移動方向的扇形掃描區(qū)域內(nèi)的靶標(biāo)距離信息。

圖2 MLS 測量系統(tǒng)Fig.2 MLS measurement system
1.2 靶標(biāo)樣本
采用樹高1.4 m、冠幅0.8 m 的仿真樹模擬疏枝靶標(biāo),仿真樹共有6 根樹枝,選擇2、4、5、6 根樹枝模擬由疏到密的不同疏枝情況,分別作為靶標(biāo)1 ~4號,如圖3 所示。

圖3 疏枝靶標(biāo)Fig.3 Sparse branch target
采用網(wǎng)格方法測量單片葉面積,如圖4 所示,網(wǎng)格尺寸為0.2 cm。經(jīng)測量,葉片高6.7 cm,寬4.0 cm,面積為19 cm2。由于仿真樹的所有葉片面積相同,將葉片數(shù)乘以單片葉面積,可得到靶標(biāo)總體葉面積,如表1 所示。

圖4 單片葉面積測量Fig.4 Measurement of single leaf area

表1 靶標(biāo)總體葉面積Tab.1 Total leaf area of target
1.3 格網(wǎng)面積計算
1.3.1 變尺度格網(wǎng)
MLS 點云數(shù)據(jù)為格網(wǎng)結(jié)構(gòu),可以通過測量點幀序號i 和幀內(nèi)編號j 進行索引,記為(i,j),如圖5 所示。

圖5 MLS 數(shù)據(jù)的格網(wǎng)結(jié)構(gòu)Fig.5 Grid structure of MLS data
由于MLS 分辨率受到LiDAR 測量距離和移動速度影響,格網(wǎng)的尺度并不一致,稱為變尺度格網(wǎng)[21]。令ds和dm分別表示LiDAR 掃描方向和移動方向上的格網(wǎng)尺度,如圖6 所示,則測量點(i,j)的格網(wǎng)尺度為

式中 r(i,j)——測量點(i,j)的測量距離
Δα——LiDAR 弧度分辨率
v(i)——LiDAR 在第i 幀的移動速度
Δt——LiDAR 掃描周期
由式(1)可知,隨著LiDAR 移動速度和測量點距離增加,格網(wǎng)尺度增加,點云密度減小。
用測量點的格網(wǎng)面積表示與其接觸的葉片面積,測量點(i,j)的格網(wǎng)面積為


圖6 變尺度格網(wǎng)Fig.6 Variable-scale grid
1.3.2 格網(wǎng)尺度范圍
為準確測量葉片面積,格網(wǎng)尺度應(yīng)小于葉片尺度,取葉片長、寬中的較小值作為葉片尺度Δleaf,則MLS 測量系統(tǒng)的最大探測距離rmax和最大移動速度vmax為

1.4 葉面積計算
為提取冠層點云數(shù)據(jù),求取MLS 點云三維坐標(biāo),其中,x 軸為LiDAR 移動方向,y 軸為深度方向,z軸垂直地面向上。測量點(i,j)的三維坐標(biāo)為

式中 θ(j)——幀內(nèi)第j 個測量點的掃描角度
根據(jù)冠層點云邊界設(shè)置坐標(biāo)閾值xmin、xmax、ymin、ymax、zmin、zmax,計算冠層點云的總體格網(wǎng)面積(Total grid area,TGA)

式中 R——坐標(biāo)在[xmin,xmax]、[ymin,ymax]、[zmin,
zmax]范圍內(nèi)點云索引的集合
ATG——總體格網(wǎng)面積
采用線性模型擬合冠層總體葉面積與總體格網(wǎng)面積的回歸關(guān)系,即

式中 k——斜率 b——截距
ATL——擬合冠層總體葉面積
變量對靶施藥時,首先計算當(dāng)前施藥區(qū)域內(nèi)冠層點云的格網(wǎng)面積ATG,然后采用式(7)求取葉面積ATL,據(jù)此調(diào)節(jié)施藥劑量,使藥液均勻分布在葉片上。
2 試驗與分析
選取葉片長、寬中數(shù)值較小的葉片寬作為葉片尺度,即Δleaf=0.04 m。根據(jù)式(3)、(4),MLS 探測距離應(yīng)小于9.167 m,移動速度應(yīng)小于1.6 m/s。為分析LiDAR 探測距離和移動速度對葉面積測量的影響,絲桿到樹干的距離D 設(shè)為1.0、1.5、2.0 m 3 個等級,同時,為模擬不同移動速度,對點云數(shù)據(jù)進行采樣,即每隔若干幀選取一幀點云數(shù)據(jù),設(shè)置不同的采樣比使速度在0.194 ~1.455 m/s 之間變化,如表2 所示。

表2 采樣比設(shè)置Tab.2 Sampling ratio setting
按照以上參數(shù)分別對4 個靶標(biāo)進行數(shù)據(jù)采集,如圖7 所示,通過改變探測距離和采樣比,每個靶標(biāo)均獲取27 個樣本,共獲取108 個靶標(biāo)樣本。

圖7 靶標(biāo)MLS 數(shù)據(jù)采集Fig.7 Acquisition of target MLS data
2.1 冠層格網(wǎng)面積
2.1.1 不同參數(shù)對靶標(biāo)點云的影響
求取原始點云數(shù)據(jù)的三維空間坐標(biāo),設(shè)置閾值分割出冠層點云,如圖8 所示,此時D=1.0 m,為未采樣的原始數(shù)據(jù)。
圖9 為D =1.5 m 時采樣比取20、80、140 時3 號靶標(biāo)的冠層點云,隨著LiDAR 移動速度變快,點云密度降低,點云數(shù)顯著減小。
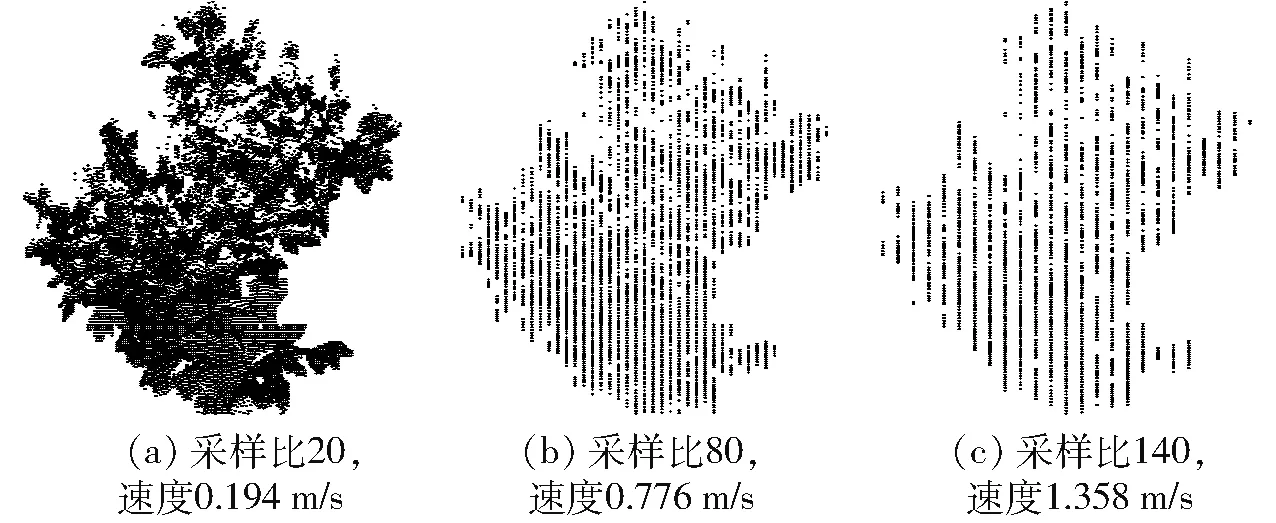
圖9 不同速度下的冠層點云Fig.9 Canopy point cloud at different velocities
圖10 給出D=1.5 m 時3 號靶標(biāo)原始點云數(shù)據(jù)的距離直方圖,從圖中可看出,受2D LiDAR 扇形掃描測量方式和靶標(biāo)冠層結(jié)構(gòu)及葉片分布影響,冠層內(nèi)的點云距離有較大差異,點云密度不一致。
表3 給出不同探測距離下3 號靶標(biāo)原始點云數(shù)據(jù)的距離統(tǒng)計值及點云數(shù),隨著探測距離變大,點云密度降低,點云數(shù)顯著減小。

表3 探測距離對靶標(biāo)點云的影響Tab.3 Total leaf area of target
2.1.2 不同參數(shù)對靶標(biāo)點云數(shù)和格網(wǎng)面積的影響
表4 為不同速度和探測距離下3 號靶標(biāo)的格網(wǎng)面積,從表中可看出,格網(wǎng)面積受探測距離和移動速度影響較小。

表4 不同速度和探測距離下的靶標(biāo)格網(wǎng)面積Tab.4 Target grid area under different speeds and distances m2
為對比不同參數(shù)對靶標(biāo)點云數(shù)N 和格網(wǎng)面積ATG的影響,對數(shù)據(jù)進行預(yù)處理得到相對靶標(biāo)點云數(shù)N 和相對格網(wǎng)面積,計算式為

式中 Nmin——靶標(biāo)點云數(shù)最小值
ATGmin——格網(wǎng)面積最小值
圖11 為不同靶標(biāo)27 個樣本的相對靶標(biāo)點云數(shù)和相對靶標(biāo)格網(wǎng)面積,為便于比較,設(shè)置相同的縱坐標(biāo)范圍。從圖中可看出,靶標(biāo)點云數(shù)受LiDAR 移動速度和探測距離影響較大,同一靶標(biāo)的點云數(shù)有較大差異,而格網(wǎng)面積則差異較小。

圖11 相對靶標(biāo)點云數(shù)和格網(wǎng)面積Fig.11 Relative point number and grid area of target
采用變異系數(shù)(Coefficient of variation,CV)評價同一靶標(biāo)點云數(shù)及格網(wǎng)面積的離散程度,計算式為

式中 σ——數(shù)據(jù)標(biāo)準差
μ——數(shù)據(jù)均值
Cv——變異系數(shù)
表5 為靶標(biāo)點云數(shù)及格網(wǎng)面積的變異系數(shù),靶標(biāo)格網(wǎng)面積具有較小的變異系數(shù),不同參數(shù)下能穩(wěn)定提取靶標(biāo)格網(wǎng)面積。由于3、4 號靶標(biāo)枝葉遮擋程度較高,因此不同參數(shù)(尤其是不同距離)對點云數(shù)的影響大于1、2 號靶標(biāo)。由于離散格網(wǎng)會對枝葉稀疏的靶標(biāo)引入更大的測量誤差,因此與枝葉較密集的3、4 號靶標(biāo)相比,1、2 號靶標(biāo)有更大的格網(wǎng)面積變異系數(shù)。

表5 靶標(biāo)變異系數(shù)Tab.5 Coefficient of variation of target
2.2 冠層葉面積
采用線性模型擬合TGA 和TLA,如圖12 所示,擬合優(yōu)度為0.909 0,均方根誤差為0.129 7 m2,擬合方程為

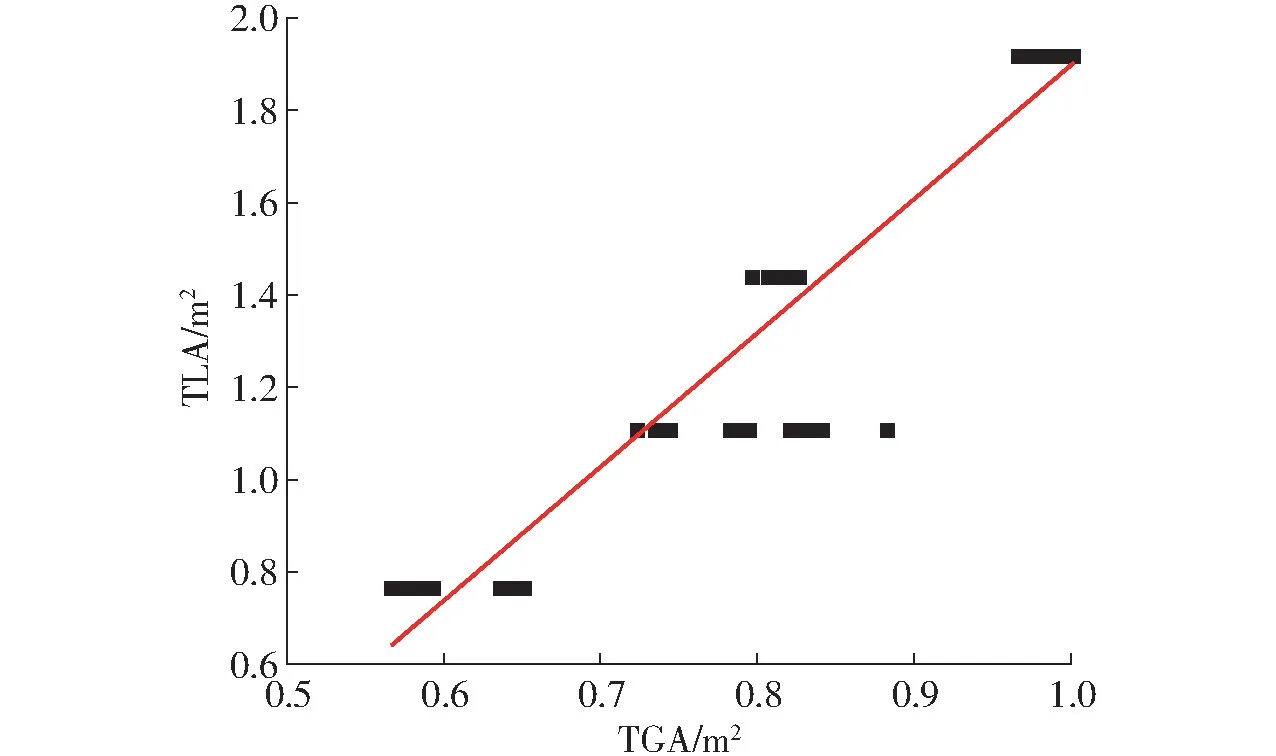
圖12 靶標(biāo)葉面積擬合曲線Fig.12 Fitting of target leaf area
為分析不同靶標(biāo)的葉面積測量精度,計算每個靶標(biāo)樣本的相對誤差

所有樣本的相對誤差均值為9.16%,標(biāo)準差為7.71%,在D=2.0 m 時測量2 號靶標(biāo)相對誤差最大,為40.99%。表6 ~8 統(tǒng)計了不同靶標(biāo)、不同探測距離和不同速度下葉面積測量的相對誤差均值和標(biāo)準差。從表6 可看出,3、4 號靶標(biāo)的相對誤差小于枝葉更為稀疏的1、2 號靶標(biāo),這是由于離散格網(wǎng)對枝葉稀疏的靶標(biāo)引入更大的測量誤差。從表7 可看出,探測距離對測量誤差有較大影響,探測距離越遠,格網(wǎng)在LiDAR 掃描方向上的尺度越大,使得測量精度越低。從表8 可看出,與靶標(biāo)類型和探測距離相比,速度對測量誤差影響較小,根據(jù)式(1)可知,速度對所有格網(wǎng)尺度的影響相同,而探測距離改變會引起測量點距離發(fā)生不同的變化,這種不一致性導(dǎo)致了探測距離對測量誤差有較大影響。

表6 不同靶標(biāo)的葉面積測量相對誤差Tab.6 Relative error of leaf area measurement of different targets %
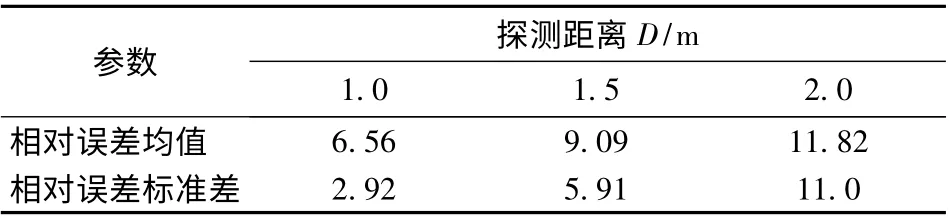
表7 不同探測距離的葉面積測量相對誤差Tab.7 Relative error of leaf area measurement under different distances %

表8 不同速度的葉面積測量相對誤差Tab.8 Relative error of leaf area measurement at different speeds %
3 結(jié)論
(1)針對疏枝果園的變量對靶施藥問題,提出一種基于MLS 測量系統(tǒng)的靶標(biāo)葉面積計算方法,通過分析系統(tǒng)分辨率建立變尺度格網(wǎng),采用冠層總體格網(wǎng)面積估計總體葉面積。
(2)采用仿真樹模擬4 種疏枝靶標(biāo),改變MLS的探測距離和移動速度,每個靶標(biāo)采集27 個樣本。試驗結(jié)果表明,冠層格網(wǎng)面積受探測距離和移動速度影響較小,變異系數(shù)最大為0.053 7。
(3)建立靶標(biāo)總體格網(wǎng)面積和真實總體葉面積的線性回歸模型,擬合優(yōu)度為0.909 0,葉面積測量相對誤差均值為9.16%,說明本文方法能有效減小LiDAR 探測距離和移動速度對葉面積測量的影響。
(4)接下來可進一步研究枝葉分離方法,去除冠層中的枝干點云數(shù)據(jù),利用激光入射角和多次回波校正格網(wǎng)面積,可提高葉面積測量精度。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
