多級活塞缸式發(fā)射裝置結(jié)構(gòu)安全性分析
2020-07-06 08:25:24郭錦炎吳新躍杭立杰
彈道學(xué)報 2020年2期
孟 艷,王 璽,郭錦炎,吳新躍,杭立杰
(北京航天發(fā)射技術(shù)研究所,北京 100076)
冷發(fā)射技術(shù)是重載導(dǎo)彈武器系統(tǒng)發(fā)射的重要技術(shù)之一,在大量型號中得到了應(yīng)用。傳統(tǒng)冷發(fā)射技術(shù)由發(fā)射筒、適配器、動力裝置等主要部件組成,利用動力裝置產(chǎn)生的燃?xì)庵苯油苿訉?dǎo)彈在發(fā)射筒內(nèi)運動,具有技術(shù)成熟、彈道穩(wěn)定、導(dǎo)彈姿態(tài)控制精度高等優(yōu)點,但也存在裝填過程緩慢,兼容性差等一些不利于實戰(zhàn)化的問題。多級活塞缸式發(fā)射裝置是一種利用燃?xì)鈩恿ν苿佣嗉壔钊咨扉L,進而間接推動導(dǎo)彈運動的新型冷發(fā)射技術(shù)[1],具有免裝填、低過載、可兼容多型導(dǎo)彈等優(yōu)點[2]。
在冷發(fā)射安全性分析方面,國內(nèi)外針對不同類型的發(fā)射系統(tǒng)開展過大量研究,殷增振等[3]分析了車載導(dǎo)彈發(fā)射系統(tǒng)的柔體構(gòu)件變形對發(fā)射筒振動和導(dǎo)彈出筒姿態(tài)的影響;高星斗等[4]建立了車載導(dǎo)彈傾斜發(fā)射系統(tǒng)的剛?cè)狁詈蟿恿W(xué)模型,獲得了導(dǎo)彈初始擾動的各影響因子;康甜等[5]采用理論方法針對某艦載傾斜發(fā)射導(dǎo)彈進行了計算,仿真分析了發(fā)射臂振動、推力偏心、導(dǎo)軌不平、艦船運動等干擾因素對初始擾動的影響,并進行了5 000 次數(shù)值打靶統(tǒng)計分析;趙克轉(zhuǎn)等[6]利用機電液聯(lián)合虛擬樣機技術(shù),研究了主動控制懸架發(fā)射車在行進中發(fā)射導(dǎo)彈時系統(tǒng)的動力學(xué)特性,獲得了車體振動、發(fā)射裝置隨機響應(yīng)和導(dǎo)彈運動特性的動態(tài)數(shù)據(jù)。
對于多級活塞缸式發(fā)射裝置的分析多集中于發(fā)射內(nèi)彈道的分析,缺少對發(fā)射裝置結(jié)構(gòu)安全性的分析討論。仝建祿等[2]采用經(jīng)典內(nèi)彈道和氣體動力學(xué)理論建立了二級活塞缸式彈射機構(gòu)的數(shù)值仿真模型;江坤等[1]采用集總參數(shù)法建立了多級活塞缸式發(fā)射裝置的內(nèi)彈道模型,并利用四階龍格-庫塔法進行了求解;唐垚等[7]基于計算流體力學(xué)方法,對多級活塞缸彈射過程進行了數(shù)值仿真,并對比了傳統(tǒng)發(fā)射筒式彈射和多級活塞缸式彈射的仿真結(jié)果,發(fā)現(xiàn)在相同初始條件下,采用發(fā)射筒燃?xì)鈴椛涞膶?dǎo)彈的運動加速度和速度均大于多級活塞缸式彈射。
本文對多級活塞缸式發(fā)射裝置的運動過程進行了理論分析,并對多級活塞缸式發(fā)射裝置的緩沖吸能需求進行了定性分析,最后分析了不同影響因素對多模塊活塞缸式發(fā)射裝置導(dǎo)彈離臺姿態(tài)的影響規(guī)律,為開展多級活塞缸式發(fā)射裝置的設(shè)計和關(guān)鍵指標(biāo)控制提供了依據(jù)。
1 發(fā)射裝置原理介紹
多級活塞缸式發(fā)射裝置主要是由運動平臺(可選)、缸體、緩沖材料、動力裝置等組成,原理示意圖如圖1所示。動力裝置產(chǎn)生的高溫燃?xì)馔苿痈骷壔钊籽刂钊b置的軸線運動,進而推動頂端的導(dǎo)彈運動。基于內(nèi)彈道仿真分析結(jié)果,在多級活塞缸式發(fā)射裝置的彈射過程中,低壓室內(nèi)壓強分布較為均勻,溫度接近燃?xì)饪倻?熱環(huán)境較為惡劣,但活塞缸裝置的密封性保證了裝置之外的熱環(huán)境較為溫和,降低了對彈上裝置的熱影響;隨著活塞缸逐級展開,導(dǎo)彈運動的加速度呈階躍式下降[7],為了降低換級過程對導(dǎo)彈的振動沖擊,在各級活塞缸之間需要設(shè)置緩沖材料;多級活塞缸式發(fā)射裝置做功方式為分段、不連續(xù)做功,隨段數(shù)和活塞質(zhì)量增加,活塞推彈時間減少,做功效率降低[1],為增加彈射能力,可采用多個模塊并聯(lián),通過運動平臺推動導(dǎo)彈運動,如圖2所示。
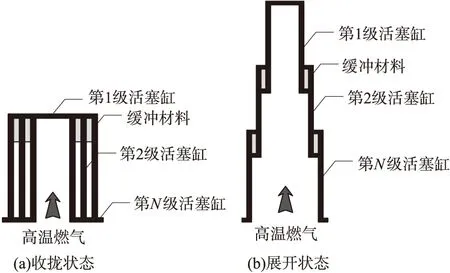
圖1 多級活塞缸工作原理示意圖
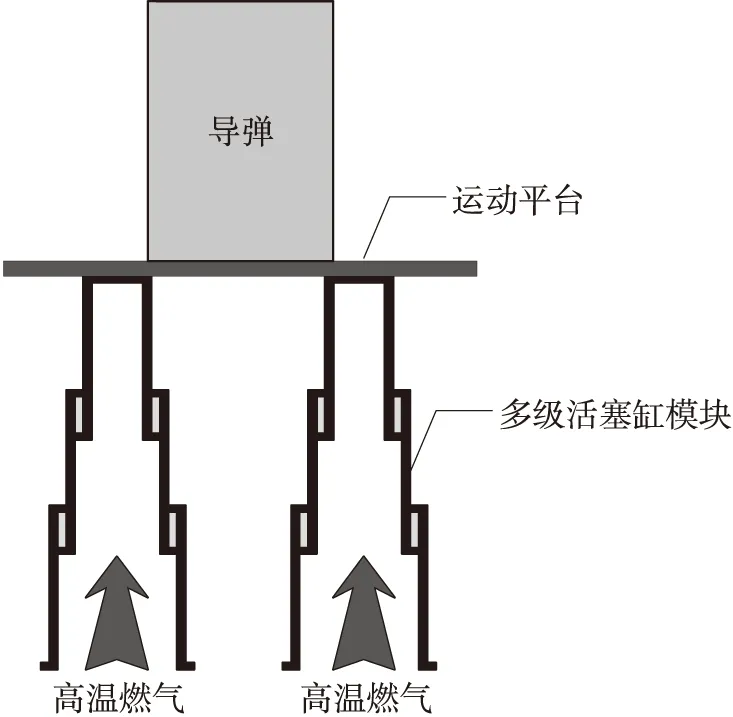
圖2 多級活塞筒模塊分布
根據(jù)多級活塞缸式發(fā)射裝置的工作原理,在進行結(jié)構(gòu)設(shè)計時需要考慮的重點包括:①多級活塞缸的伸出順序穩(wěn)定,不亂缸;②多級活塞缸之間換級緩沖吸能良好,不發(fā)生劇烈碰撞;③多級缸推動的導(dǎo)彈離臺姿態(tài)穩(wěn)定、可控。
下面分別對這些內(nèi)容進行分析和討論。
2 發(fā)射裝置運動分析
多級活塞缸式發(fā)射裝置的運動過程與多級液壓缸類似,根據(jù)文獻(xiàn)[8-9]的多級液壓缸理論,保證多級缸各級按級伸出或縮回的關(guān)鍵在于保證各級活塞面積滿足一定的幾何關(guān)系;根據(jù)文獻(xiàn)[10]的分析結(jié)果:油缸的工作壓力越大越不易亂筒,面積差別越大越不易亂筒,摩擦力差值越小越不易亂筒。
多級活塞缸式發(fā)射裝置中各級活塞缸和導(dǎo)彈的運動為軸向一維運動,導(dǎo)彈在軸向上受到多級缸推力和重力作用,忽略摩擦等阻力的影響,由牛頓第二定律可得到多級活塞缸的運動方程為
(1)
式中:Sn為第n級缸筒運動過程中燃?xì)馔苿拥挠行娣e,p為燃?xì)鈮毫?mD為導(dǎo)彈的質(zhì)量,mi為各級缸筒的質(zhì)量,g為重力加速度,a為導(dǎo)彈的運動加速度。
假設(shè)多級活塞缸的幾何結(jié)構(gòu)如圖3所示,各級活塞缸的編號由半徑最小一級到最大一級依次為1到N,各級活塞缸的質(zhì)量為mj,各級活塞缸的受推半徑為Rj,各級活塞缸的翻邊寬度為bj,各級活塞缸的長度為Lj,各級活塞缸的缸筒厚度為δj。考慮一般情況,各級缸筒的長度一致,其質(zhì)量與受推半徑、翻邊寬度和缸筒厚度的關(guān)系近似為
(2)
式中:ρ為缸筒材料密度。
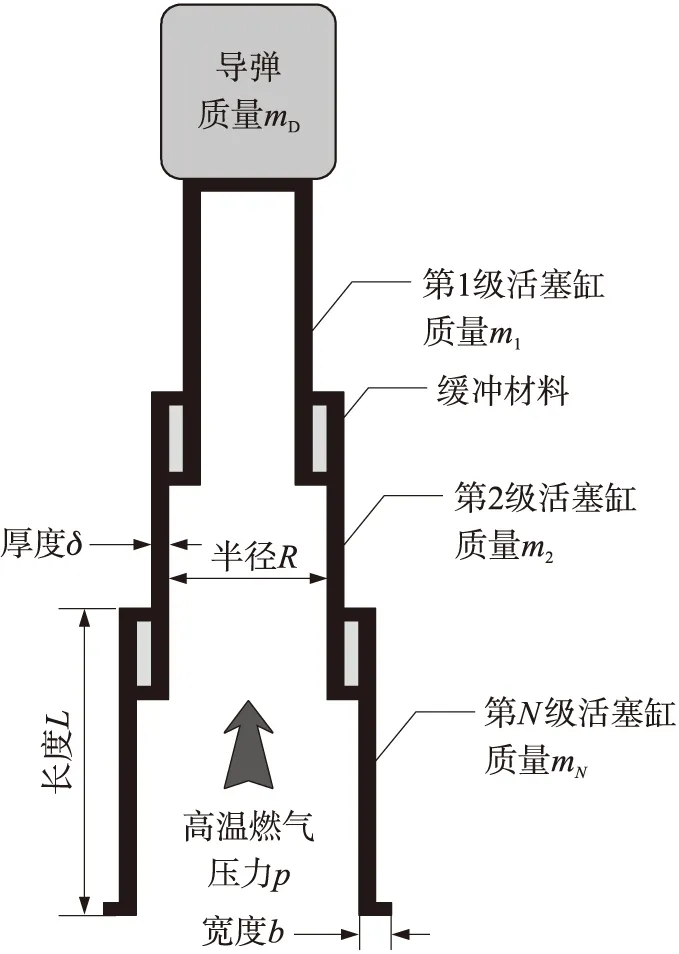
圖3 多級活塞缸幾何結(jié)構(gòu)示意圖
多級活塞缸在燃?xì)鈮毫Φ淖饔孟逻\動,同時推動導(dǎo)彈,若只有最內(nèi)一級活塞缸推動導(dǎo)彈,則初始時刻各級缸筒的加速度分別為
(3)
將式(2)代入式(3),可得:
aj=bjph/(ρδjL), 2≤j≤N
(4)

在不滿足上述條件時,多級活塞缸發(fā)射裝置各級缸筒的加速度存在關(guān)系aj≥a1(2≤j≤N),但是一般在發(fā)射裝置的頂端設(shè)置運動平臺,運動平臺與最內(nèi)一級缸筒頂端連接,運動平臺的半徑較大,各級缸筒向上運動時受到運動平臺的約束,只能與最內(nèi)一級缸筒共同運動,在運動到達(dá)限位后逐級停止,直到最內(nèi)一級運動到達(dá)限位。
通過上述分析表明,多級活塞缸推動導(dǎo)彈的運動通常是由各級缸筒同步推動導(dǎo)彈運動開始的,然后隨著緩沖限位按照半徑由大到小的順序依次運動到位,當(dāng)最內(nèi)一級缸筒運動到位后,導(dǎo)彈在慣性作用下繼續(xù)運動,完成整個彈射過程。
3 發(fā)射裝置緩沖吸能需求分析
通過對多級活塞缸式發(fā)射裝置的運動過程進行分析,發(fā)現(xiàn)多級活塞缸在高溫燃?xì)獾耐苿酉麓嬖?種運動模式:①各級缸筒按照半徑從小到大順序伸出到位;②各級缸筒按照半徑從大到小順序伸出到位。在第1種運動模式下,每一級缸筒運動到限位時,只有該級缸筒與下一級缸筒之間存在碰撞,緩沖吸能的要求較低;而在第2種運動模式下,每一級缸筒運動到限位時都會對之前已經(jīng)到位的缸筒產(chǎn)生沖擊,對緩沖吸能的要求較高。
常用的碰撞緩沖吸能裝置有液壓緩沖吸能裝置、彈性緩沖吸能裝置和塑性緩沖吸能裝置等,其中液壓緩沖吸能裝置一般通過油液的耗散作用將沖擊能量消耗掉;彈性緩沖吸能裝置一般采用橡膠、塑料等材料,通過其黏彈性變形將沖擊能量消耗掉;而塑性緩沖吸能裝置一般采用薄壁金屬結(jié)構(gòu),通過其塑性變形將沖擊能量消耗掉[11]。多級活塞缸式發(fā)射裝置的熱環(huán)境惡劣、緩沖吸能空間狹小,不適合采用液壓緩沖吸能裝置和彈性緩沖吸能裝置,只能采用塑性緩沖吸能裝置。理想塑性緩沖吸能裝置的力學(xué)特性曲線如圖4所示。圖中,P為載荷,E為變形。圖4中曲線表明理想塑性緩沖吸能裝置具有較短的彈性變形階段,能夠迅速進入有效吸能的塑性變形階段,且塑性變形階段的載荷穩(wěn)定、持續(xù)較長,能夠在有效降低沖擊載荷的前提下充分吸收沖擊能量。
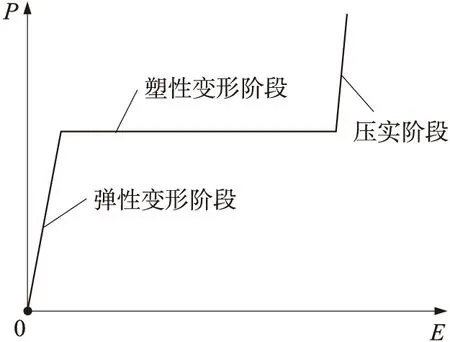
圖4 塑性吸能裝置的理想力學(xué)特性曲線
4 導(dǎo)彈離臺姿態(tài)影響因素分析
可依據(jù)導(dǎo)彈規(guī)模和質(zhì)量特性設(shè)計多級活塞缸裝置的組數(shù)以及活塞缸的級數(shù)。多組多級活塞缸式發(fā)射裝置聯(lián)通高壓燃?xì)?高壓燃?xì)庖来瓮苿痈骷墯飧走\動,共同為導(dǎo)彈提供運動速度,保證離臺平穩(wěn)。從動力學(xué)理論上看,結(jié)構(gòu)質(zhì)量特性偏差、結(jié)構(gòu)裝配姿態(tài)偏差、燃?xì)鈩恿ζ睢⒕彌_材料特性偏差等因素均會影響導(dǎo)彈離臺動力學(xué)響應(yīng)。以文獻(xiàn)[7]中所展示的發(fā)射系統(tǒng)為例,其發(fā)射裝置采用4組多級活塞缸模塊,每組含10級活塞缸。針對上述因素采用有限元仿真分析方法進行定量分析。
4.1 仿真建模方法
有限元模型采用ABAQUS軟件建立,主要包含導(dǎo)彈、運動平臺、4個多級活塞缸模塊和底板,多級活塞缸模塊頂部與運動平臺連接,運動平臺上表面與導(dǎo)彈尾部設(shè)置接觸;模型中暫未包含緩沖裝置,各級活塞缸之間設(shè)置移動副,限制移動位移;載荷包括重力和高溫燃?xì)鈨?nèi)壓,內(nèi)壓采用文獻(xiàn)[7]內(nèi)彈道分析結(jié)果,如圖5所示,加載在各級活塞缸上。多級活塞缸彈射系統(tǒng)有限元模型如圖6所示。
采用顯式動力學(xué)方法求解動力學(xué)仿真模型,獲得理想的、不包含偏差的彈射動力學(xué)響應(yīng),導(dǎo)彈理想的加速度、速度和位移曲線如圖7所示,圖中鋸齒狀波形是由于每一級推桿到位后拉動下一級推桿時質(zhì)量發(fā)生突變造成的。在設(shè)定內(nèi)壓的作用下,導(dǎo)彈的加速度先迅速增加然后逐漸減小,加速度峰值出現(xiàn)在所有活塞缸都未到位時,最大加速度約為42.2 m/s2;導(dǎo)彈運動到脫離多級活塞缸模塊時的速度約為21.2 m/s,運動距離約為10.7 m。
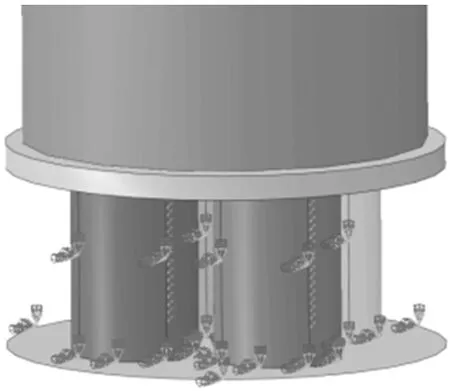
圖6 多級推桿彈射系統(tǒng)模型
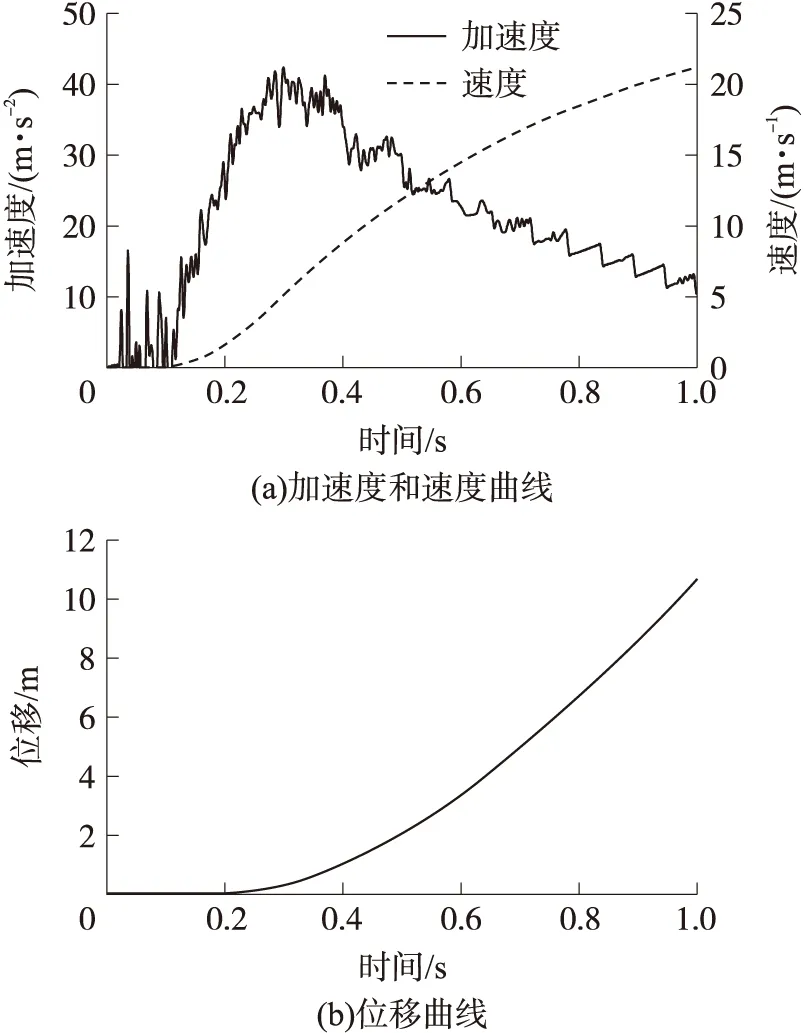
圖7 理想狀態(tài)下導(dǎo)彈彈射動力學(xué)響應(yīng)
4.2 結(jié)構(gòu)質(zhì)量特性偏差
考慮導(dǎo)彈質(zhì)心橫向偏移,即考慮導(dǎo)彈的質(zhì)心偏離多級活塞缸發(fā)射裝置的中心線,不考慮其他偏差。通過調(diào)整有限元模型中導(dǎo)彈的質(zhì)心橫向坐標(biāo),使其質(zhì)心偏離多級活塞缸發(fā)射裝置的中心線,偏離量由設(shè)計允許最大值確定,仿真得到導(dǎo)彈的彈射動力學(xué)響應(yīng),對比質(zhì)心偏差工況與理想工況的導(dǎo)彈加速度曲線,如圖8所示。可以看出,導(dǎo)彈的加速度基本無變化;導(dǎo)彈離臺時刻的橫向位移云圖如圖9所示,其頭部與尾部橫向位移差約為10 mm,可見導(dǎo)彈的質(zhì)心橫向偏移會影響導(dǎo)彈的離臺姿態(tài),但影響幅度很小。
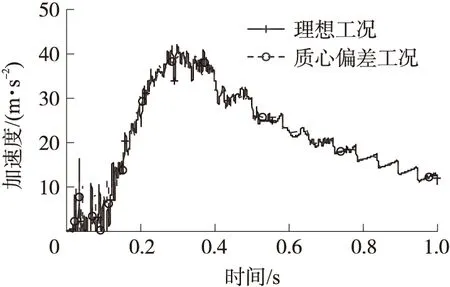
圖8 質(zhì)心偏差工況導(dǎo)彈加速度對比
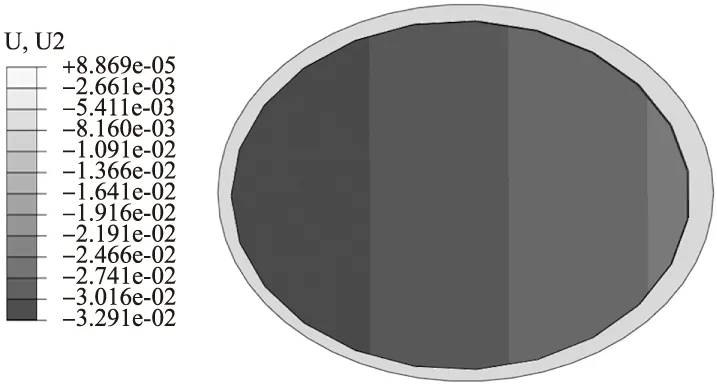
圖9 質(zhì)心偏差工況導(dǎo)彈橫向位移云圖(單位:m)
4.3 結(jié)構(gòu)裝配姿態(tài)偏差
考慮結(jié)構(gòu)裝配姿態(tài)偏差,即考慮整個發(fā)射裝置初始安裝位置偏斜,不考慮其他偏差。調(diào)整有限元模型中整個裝配模型的傾角,使其偏斜一定的角度,偏斜量由設(shè)計允許最大值確定,仿真得到導(dǎo)彈的彈射動力學(xué)響應(yīng),對比姿態(tài)偏差工況與理想工況的導(dǎo)彈加速度曲線,如圖10所示。
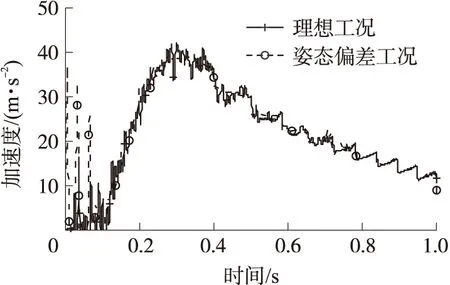
圖10 姿態(tài)偏差工況導(dǎo)彈加速度對比
可以看出,導(dǎo)彈的加速度基本無變化;導(dǎo)彈離臺時刻的橫向位移云圖如圖11所示,其頭部與尾部橫向位移差約為100 mm,可見結(jié)構(gòu)裝配姿態(tài)偏差會影響導(dǎo)彈的離臺姿態(tài),且影響幅度較大。
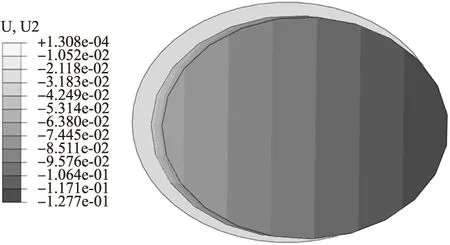
圖11 姿態(tài)偏差工況導(dǎo)彈橫向位移云圖(單位:m)
4.4 燃?xì)鈩恿ζ?/h3>
考慮由于摩擦、內(nèi)壓不均等因素導(dǎo)致的各個模塊之間的載荷偏差、導(dǎo)彈無質(zhì)心偏差及初始安裝位置偏差。通過調(diào)整各個多級活塞缸模塊上加載的內(nèi)壓數(shù)值,將其中一個模塊的內(nèi)壓降低5%,仿真得到導(dǎo)彈的彈射動力學(xué)響應(yīng),對比燃?xì)鈩恿ζ罟r與理想工況的導(dǎo)彈加速度曲線,如圖12所示,可以看出,導(dǎo)彈的加速度曲線較理論曲線都略有延遲,加速度值也略有下降;導(dǎo)彈離臺時刻的橫向位移云圖如圖13所示,其頭部與尾部橫向位移差基本為0,可見各個多級缸活塞模塊燃?xì)鈩恿ζ罨静粫绊憣?dǎo)彈的離臺姿態(tài)。
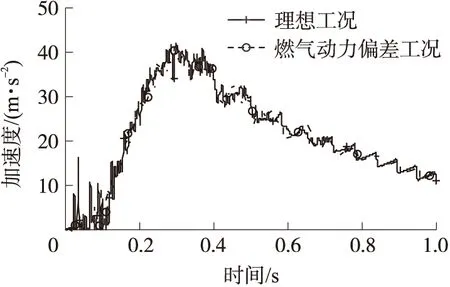
圖12 燃?xì)鈩恿ζ罟r導(dǎo)彈加速度對比
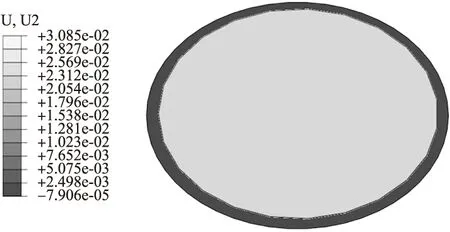
圖13 燃?xì)鈩恿ζ罟r導(dǎo)彈橫向位移云圖(單位:m)
4.5 緩沖材料特性偏差
考慮由于變形不均等因素導(dǎo)致的各個模塊之間的運動行程偏差、導(dǎo)彈無質(zhì)心偏差及初始安裝位置偏差。通過調(diào)整各個多級活塞缸模塊上的移動副限位,將其中一個模塊的運動行程降低5%,仿真得到導(dǎo)彈的彈射動力學(xué)響應(yīng),對比緩沖偏差工況與理想工況的導(dǎo)彈加速度曲線,如圖14所示。
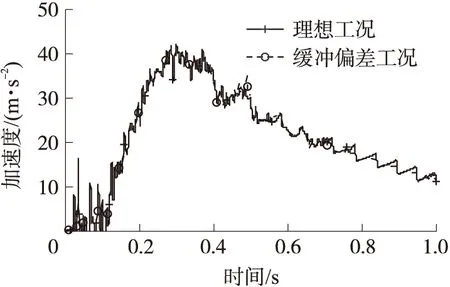
圖14 緩沖偏差工況導(dǎo)彈加速度對比
可以看出,導(dǎo)彈的加速度曲線與理論曲線的階梯變化時刻相同,但加速度值略有下降;導(dǎo)彈離臺時刻的橫向位移云圖,如圖15所示,其頭部與尾部橫向位移差基本為0,可見各個多級缸活塞模塊的緩沖偏差基本不會影響導(dǎo)彈的離臺姿態(tài)。
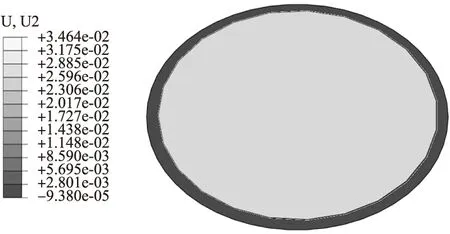
圖15 緩沖偏差工況導(dǎo)彈橫向位移云圖(單位:m)
5 結(jié)束語
本文分析了多級活塞缸式發(fā)射裝置的運動規(guī)律和多模塊發(fā)射裝置中偏差因素對導(dǎo)彈離臺姿態(tài)的影響規(guī)律,得到了以下結(jié)論:
①多級活塞缸式發(fā)射裝置的運動規(guī)律由各級缸筒的幾何參數(shù)和被推動導(dǎo)彈的質(zhì)量參數(shù)決定,一般是由各級缸筒同步推動導(dǎo)彈運動開始,然后隨著緩沖限位按照半徑由大到小的順序依次運動到位;
②多級活塞缸式發(fā)射裝置對緩沖吸能的需求較高,只有塑性緩沖吸能裝置才能滿足;
③對于多模塊的多級活塞缸式發(fā)射裝置而言,結(jié)構(gòu)質(zhì)量特性偏差、裝配姿態(tài)偏差對導(dǎo)彈的離臺姿態(tài)有影響,需要嚴(yán)格限制偏差幅度;燃?xì)鈩恿ζ睢⒕彌_材料特性偏差對導(dǎo)彈的離臺姿態(tài)基本無影響,在一定的偏差幅度范圍內(nèi)導(dǎo)彈都能保持平穩(wěn)。