移動機器人運動過程中的障礙物識別避讓
2020-07-04 02:42:08王敬偉
機電信息 2020年9期
關鍵詞:移動機器人
摘要:移動過程中障礙物識別是機器人導航和路徑規(guī)劃的重要基礎,也是提升機器人智能化水平的重要體現(xiàn)。現(xiàn)以自行開發(fā)的四輪固定式移動機器人作為開發(fā)平臺,基于圖像不變矩和RBF神經(jīng)網(wǎng)絡實現(xiàn)智能移動機器人運動中的障礙物識別避讓,并在對障礙物識別之前對其圖像進行預處理。設計主旨在于對智能機器人在行進過程中通過攝像設備采集的圖像進行預處理,采集障礙物物體邊緣,并用神經(jīng)網(wǎng)絡對物體進行識別。對于特殊障礙物使用基于顏色的識別方式,以提高實時性,為機器人的避障以及地圖構建等工作打好基礎,為場館移動導覽機器人研發(fā)提供幫助和支持。
關鍵詞:移動機器人;邊緣采集;圖像預處理;目標識別;傳感器融合
0 ? ?引言
第一臺工業(yè)機器人是美國于1961年推出的,現(xiàn)如今,隨著社會的不斷發(fā)展,機器人技術已涉及很多領域,譬如傳感器技術、控制工程、精密機械、動力學、計算機科學技術、人工智能等。機器人也是20世紀以來發(fā)展十分迅速的一個重要的高科技領域,它是各個學科前沿技術的交叉應用。機器人的出現(xiàn)與發(fā)展使得傳統(tǒng)工業(yè)生產的方式發(fā)生了翻天覆地的變化,讓我們的生產方式從手工作業(yè)發(fā)展到機械化、自動化,直到現(xiàn)在的智能化。
如今,隨著我們生活水平的提高和科學技術的快速發(fā)展,機器人的用處已經(jīng)越來越廣泛,它可以承擔各種工作。機器人以前都是在工廠和車間里工作的,現(xiàn)在已經(jīng)開始走向室外、大海甚至是太空。具有人工智能的自主式機器人正在向制造業(yè)以外的方向擴展,這些非制造業(yè)包括了航空、深海探測、軍事偵察和打擊、建筑、救護醫(yī)療、家庭服務、農業(yè)生產、自動化辦公和自然災害救援等,如飛行機器人、海難救援機器人、化肥和農藥噴撒空中機器人、護理機器人等。
進入21世紀以來,我國迎來了老齡化時代,勞動力短缺已經(jīng)成了很多行業(yè)所不得不面對的難題,為了解決這樣的難題,很多行業(yè)和企業(yè)已經(jīng)開始大規(guī)模采用機器人替代人的勞動。可以預見,機器人也將在很多服務行業(yè)取代人工。因此,開發(fā)面向大眾服務的各類移動智能機器人已經(jīng)成為了人工智能時代大家普遍關注的又一個新興技術與產業(yè)。
本文所研究的是障礙物識別技術,準確的障礙物識別不僅是運動機器人實現(xiàn)行進過程中避讓障礙物的前提和基礎,也是運動機器人精確定位與建圖的必要條件及路徑規(guī)劃的重要保障,因此實時、高性能的障礙物識別技術是智能移動機器人的一項基礎性研究工作,本文正是要完成這一基礎性工作。本研究側重于在室內環(huán)境下,基于單目攝像頭與超聲波傳感器相融合的智能移動機器人障礙物識別技術。
1 ? ?移動機器人設計簡述
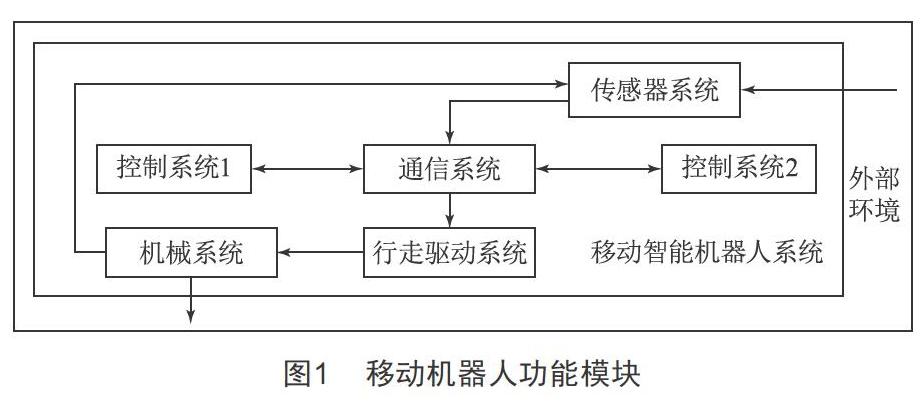
作為一個完整的移動機器人系統(tǒng),一般需具備以下幾個部分:機械系統(tǒng)、行走驅動系統(tǒng)、傳感系統(tǒng)、控制系統(tǒng)以及通信系統(tǒng)。圖1給出了本研究所設計的智能移動機器人功能模塊。
作為一個全自主的智能移動機器人,它應該具有感知、運動、導航和通信四大模塊的功能,并應具有低功耗、低成本、高性能和高智慧的特點。
我們在搭建本平臺的時候主要考慮如下:
行走機構系統(tǒng):根據(jù)實際需要,行走機構的結構形式并不是完全單一的。在實際應用中,移動機器人會被要求在各種各樣的場地上活動,因此其行走機構的結構形式有很多種。當前,對腿足式行走機構、履帶式行走機構和特殊行走機構的研究比較多,但很大一部分研究還處在實驗室驗證的階段。輪式行走機構由于控制起來比較方便,穩(wěn)定性也好,并且其行進方式是滾動前進,滾動摩擦所消耗的能源比其他行進方式要少很多,所以本平臺選用四輪式行走機構模式。
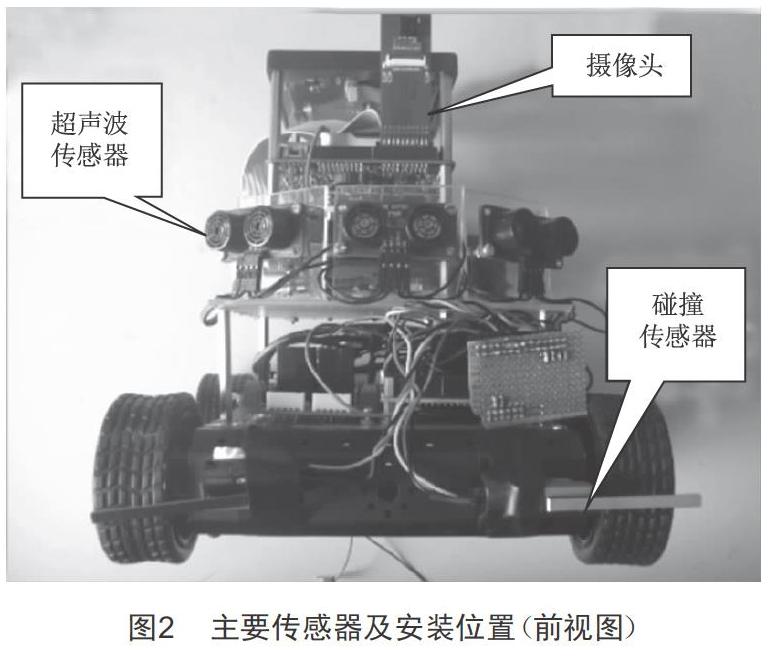
實時性是移動機器人要考慮的主要因素,其主要著眼于處理器和操作系統(tǒng)的選擇和配置。本平臺選擇采用S3C6410+STM32F103VCT6組成移動機器人的雙處理器。將基于ARM11核的S3C6410微處理器作為移動機器人的主控制器,主要負責路徑圖像的采集、無線信號的通信、采集圖像的處理、決策選擇等功能的實現(xiàn)。STM32系統(tǒng)作為輔助處理器,主要負責移動機器人的移動控制、碰撞傳感器檢測、超聲檢測、紅外測距等。圖2給出的是移動機器人的外觀以及部分主要傳感器的安裝位置。
2 ? ?障礙物圖像的識別
2.1 ? ?圖像預處理
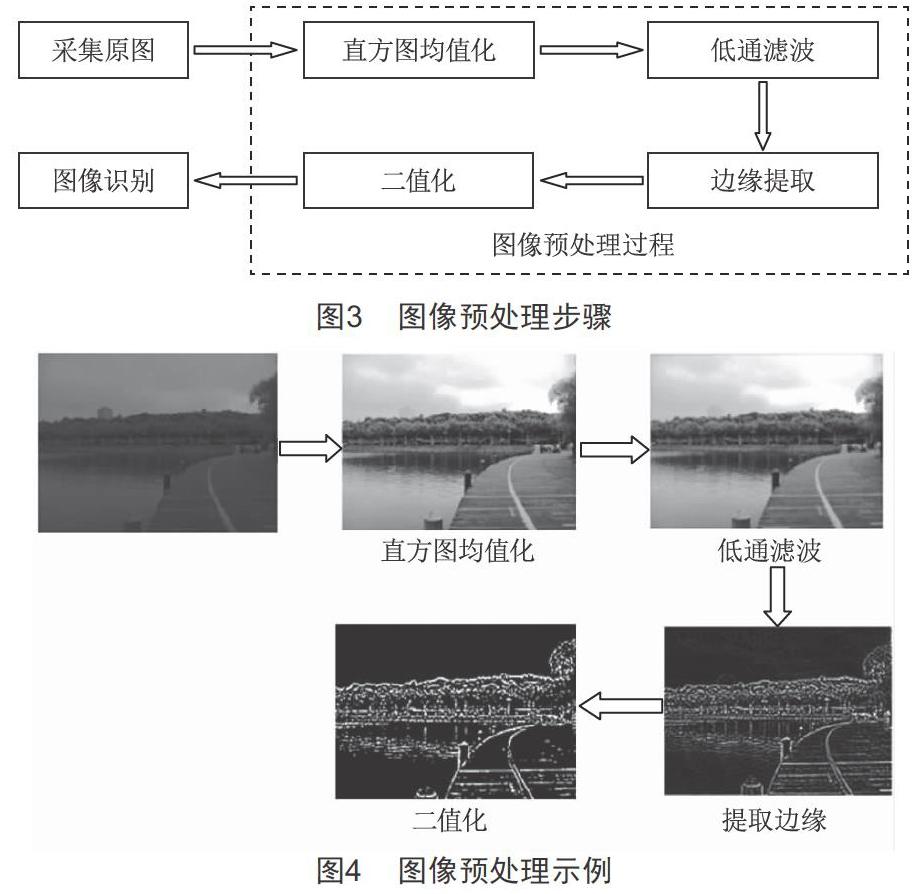
攝像頭模塊所采集到的圖像由于種種客觀條件限制,或多或少都會影響到所拍攝到的圖像的質量,從而造成圖像存在著各類噪聲、突變的條紋,畫面信息丟失等現(xiàn)象也時有發(fā)生,這些現(xiàn)象會對圖像的識別工作造成不同程度的影響。因此,在進行物體邊緣提取等工作前需先對采集到的圖片進行去噪等處理,以便最大程度地去除各類因素的干擾。
在去除噪聲等干擾后,所得到的圖像并不能立即被識別,為提高處理效率以及簡化程序設計,現(xiàn)在還需要對圖像進行二值化處理。
圖3展示了圖像預處理的步驟,圖4則是圖像預處理示例。
圖像的邊緣是其能夠被識別的最基本的特征,圖像邊緣是指圖像周圍像素的灰度值發(fā)生跳躍性變化的像素集合,即灰度值的導數(shù)較大的地方,它體現(xiàn)了圖像中的顯著變化,反映了圖像本身的形狀特征。本文對基于邊緣增強的邊緣檢測技術進行了分析,最后選擇了基于Prewwit算子的Canny算法。
2.2 ? ?基于圖像識別與超聲波結合的障礙物識別
實時視覺技術主要包括視覺信息的實時采集、信息處理、主要信息的提取跟識別。視覺信息的處理能力、處理速度、處理的可靠性和準確性是影響移動機器人智能系統(tǒng)性能的決定性因素。
本設計通過超聲波傳感器檢測障礙物的位置與距離,并將超聲波檢測出的障礙物位置與圖像識別的結果相結合,使用模糊識別的方式來判定物體的類型和方位,為進一步避障或者對障礙物進行操作打好基礎。圖5所示為本文圖像識別算法流程圖。
3 ? ?實驗結果與分析
為了驗證所采用的圖像處理與障礙物識別算法,我們在室內各種模擬環(huán)境中做了大量的測試和實驗。在室內環(huán)境特別是地面環(huán)境中,路徑上物體的顏色一般具有比較明顯的特征,常有的障礙物包括人類、桌椅、櫥柜、地板、門框、門扇、墻壁等,色彩主要集中于白色、黑色及其他非純色。
盡管有些環(huán)境下由于具體需要可以有比較多的純色,比如在有些居家環(huán)境中家庭主人比較喜好紅色,家中就會有大量紅色物體,但通常情況下不會同時存在多種純色。因此,可以通過程序設置,使機器人挑選室內較少的顏色作為特殊障礙物的標定色。
而在某些類型的室內環(huán)境中,如實驗室或工廠等場所,其桌椅、機器等一般都采用灰暗色調,如黑色、白色、灰色、灰綠色等,這個時候就可以選取對比度較大的顏色作為識別色。比如可采用在設備上加上紅色標簽的方法,以便智能機器人在移動時進行識別并及時避讓。
圖6、圖7所示分別展示了機器人在遇到不同障礙物后選擇的不同運行路徑。
測試中采取的實驗策略如下:如果識別到特殊標記障礙物,則立即停止運行;如果識別到是目標障礙物a,則向左轉彎繞開障礙物;如果識別到是目標障礙物b,則向右轉彎繞開障礙物。特殊標記定義為紅色標記,控制系統(tǒng)可對目標障礙物進行學習,即水瓶為特殊障礙物,易拉罐為目標障礙物b。
4 ? ?結語
本項研究在自行搭建的一個移動機器人平臺上實現(xiàn)了對采集到的物體圖像進行處理和分析,通過物體的外形與特定的顏色進行對比和識別;同時實現(xiàn)了視覺傳感器和超聲波傳感器的融合處理,能夠對簡單背景下的障礙物進行有效和準確識別,并且在有特殊標定障礙物的情況下可以優(yōu)先處理特殊障礙物,能夠在一定程度上滿足障礙物多樣化識別的需求,可為場館移動導覽機器人研發(fā)提供極大的幫助和支持。
[參考文獻]
[1] 王炎,周大威.移動式服務機器人的發(fā)展現(xiàn)狀及我們的研究[J].電氣傳動,2000,30(4):3-7.
[2] 李開生,張慧慧,費仁元,等.國外服務機器人的發(fā)展動態(tài)和前景[J].制造業(yè)自動化,2000,22(6):1-4.
[3] 丁明躍,常金玲,彭嘉雄.不變矩算法研究[J].數(shù)據(jù)采集與處理,1992,7(1):1-9.
[4] CHEN C C.Improved moment invariants for shape discri-mination[J].Pattern Recognition,1993,26(5):683-686.
[5] 劉敦浩,張彥鐸,李迅,等.動態(tài)環(huán)境下自適應閾值分割方法[J].計算機應用,2016,36(S2):152-156.
[6] 張建平,韓亞軍.基于視覺和嵌入式系統(tǒng)的機器人路徑規(guī)劃[J].智能機器人,2018(2):57-58.
[7] 張毅,羅元,鄭太雄,等.移動機器人技術及其應用[M].北京:電子工業(yè)出版社,2007.
收稿日期:2020-03-02
作者簡介:王敬偉(1976—),男,湖北紅安人,工程師,研究方向:多媒體交互互動。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學報(2015年4期)2015-12-27 09:38:35
機電產品開發(fā)與創(chuàng)新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
