工業機器人工具坐標系的設置
2020-07-04 02:15:25何淼
電腦知識與技術 2020年15期
何淼

摘要:該文以FANUC工業機器人為例,從工具坐標系設置的意義出發,分析了不同機器人設置工具坐標系的方法,成功建立了機器人新的工具坐標系,為機器人精確的運動控制奠定基礎。
關鍵詞:工業機器人;坐標系;TCP
中圖分類號:TP319 文獻標識碼:A
文章編號:1009-3044(2020)15-0204-02
隨著工業4.0的到來以及中國制造2025規劃,工業機器人得到了越來越廣泛的應用和智能化改造。學習和使用機器人的第一步是建立工業機器人關節之間、關節與工具或工件之間的相對運動關系,即建立工業機器人的坐標系。FANUC工業機器人坐標系有:關節坐標系JOINT、手動坐標系JGFRM、世界坐標系WORLD、用戶坐標系USER和工具坐標系TOOL。
在工業實際中,當機器人末端執行器換裝工具或發生碰撞變形時,為了實現精確的運動控制,則需要重新設置工具坐標系,以便調試機器人的位姿。本文從工具坐標系設置的意義出發,分析了不同設置方法的特點和適用場合,總結了設置步驟,為FANUC機器人的學習和使用提供了參考。
1工具坐標系TooL
工具坐標系TOOL是用來定義安裝在機器人末端執行器的工具中心點(TCP)位置和工具姿態的坐標系,工具中心點TCP一般設置在末端執行器中心,用坐標軸x、Y、z表示,而工具姿態用w、P、R表示。在FANUC機器人默認的工具坐標系中,末端執行器默認為法蘭盤,則法蘭盤中心為工具坐標系的原點,+x方向為法蘭盤中心指向法蘭盤定位孔的方向,+Z方向為垂直法蘭盤向外,+Y方向則由右手法則判定。
在實際應用中,不同功能的工業機器人會在末端執行器上安裝不同的工具,例如噴漆機器人使用噴嘴作為工具,弧焊機器人使用弧焊槍作為工具,搬運機器人常用真空吸盤、手爪等作為工具。因此,隨著末端執行器上所裝工具的位置與角度的不斷變化,工具中心點TCP及方向也會產生變化。為了方便示教,這就需要將TCP移到工具的某一個尖端位置,以建立相應新的工具坐標系,來描述所安裝的工具的TCP的位姿。也就是說,新的工具坐標系是相對于默認的工具坐標系經移動及旋轉而變換得到的,新的工具坐標系的位置和方向始終同法蘭盤保持絕對的位置和姿態關系,但在空間上是一直變化的。
2工具坐標系設置方法的選擇
工具坐標系在實際使用中,需要在機器人編程前先行設置,若未定義工具坐標系,將使用默認工具坐標系。FANUC工業機器人在建立新的工具坐標系時,提供了三種方法:直接輸入法、三點法和六點法。
其中,直接輸入法適用于新的工具坐標系的值已知的場合。
三點法適用于只改變了工具坐標系原點TCP的位置,僅進行了默認工具坐標系平移的場合。即當新的工具相對于默認的坐標系只是TCP位置(即x、Y、z)發生變換,而姿態(即w、P、R)沒變時,可通過三點標定法建立新的工具坐標系;或者將工具TCP位置的偏移量直接輸入到相應的軸的坐標值里,即可建立新的工具坐標系,如圖1所示的搬運機器人和圖2所示的涂膠機器人。
六點法適用于工具坐標系原點(TCP)的位置和姿態均改變了,不僅進行了默認工具坐標系平移又進行了旋轉的場合。即當TCP和姿態都發生變換時,則需要采用六點法建立新的工具坐標系,如圖3所示的噴漆機器人。
在圖1中,搬運機器人采用真空吸盤作為搬運工具,它的TCP點設定在吸盤的接觸面上。相對于默認的工具坐標,新的工具姿態沒變,只是TCP位置在z軸正方向上偏移了L距離。因此,可采用修改z軸的坐標值的方法或三點標定法,建立吸盤工具坐標系。
在圖2中,涂膠機器人采用膠槍作為涂膠工具,它的TCP點設定在膠槍底部的端點位置上。相對于默認的工具坐標,新的工具姿態沒變,只是TCP位置在x軸、Y軸、z軸三個方向上發生了偏移。因此,可采用修改軸的坐標值的方法或三點標定法,建立涂膠工具坐標系。
在圖3中,噴漆機器人采用噴槍作為噴漆工具,它的TCP點設定在噴槍底部的端點位置上。相對于默認的工具坐標,新的工具姿態和TCP位置均發生了變化。因此,需要采用六點標定法,建立噴漆工具坐標系。
3工具坐標系的設置
3.1直接輸入法
在FANUC機器人示教器中,直接輸入法操作步驟如下:
第一步:切換至坐標系號需設置的“方法”選擇界面,其具體操作如下:[MENU](菜單)→[SETUP](設置)→F1[Type](類型)→[Frames]坐標系→F3[0THER](坐標)→[ToolFrame](工具坐標)→選擇要設置的坐標系號→F2[DETAIL]詳細→F2[METHOD]方法,進入“方法”選擇界面。
第二步:選擇坐標系的設置方法。在“方法”選擇界面中,選擇[Direct Entry](直接輸入法)→[ENTET]回車確認,進入“直接輸入法”界面。
第三步:修改參數。在“直接輸入法”界面中,選擇并修改要設置的參數→[ENTET]回車確認。
3.2三點法
在FANUC機器人示教器中,三點法操作步驟如下:
第一步:切換至坐標系號需設置的“方法”選擇界面,與直接輸入法相同。
第二步:選擇坐標系的設置方法。在“方法”選擇界面中,選擇[Three Point](三點法)→[ENTET]回車確認,進入“三點法”界面。
第三步:記錄接近點。
a.找基準點:在機器人工作范圍內,找一個固定的尖端點作為基準點,如固定在柱子上的筆尖。
b.確定參考點:一般在工具上確定一個參考點,常選擇工具中心點TCP,如寫字機器人末端執行器安裝的毛筆工具筆尖,搬運機器人的真空吸盤。
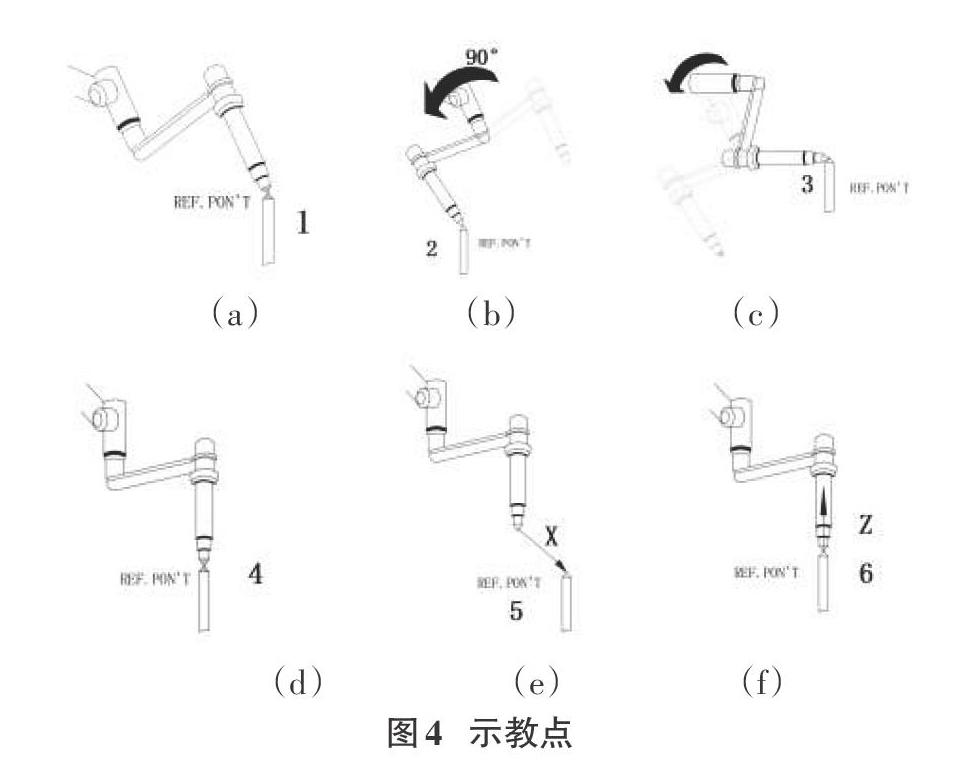
c.示教第一點:用WORLD坐標移動機器人,使工具尖端TCP接觸基準點,按[sHIFr]+F5[RECORD]記錄位置一,如圖4(a)所示。
d.示教第二點:將工具尖端TCP移開基準點,J6軸轉動90度,不要超過180度。再用WORLD坐標移動機器人,使得工具TCP接觸基準點,記錄位置二,如圖4(b)所示。
e.示教第三點:將工具尖端TCP移開基準點,J4,J5軸轉動不超過90度。再用WORLD坐標移動機器人,使得工具TCP接觸基準點,記錄位置三,如圖4圖4(c)所示。
在示教三點的姿態位置時,其姿態位置相差越大,最終獲取的TCP精度越高。
f.機器人通過這三個位置點的數據自動計算求得新的工具坐標系TCP的數據,并保存。這樣,通過三點法就將TCP成功地從默認位置移動到新工具的中心點。
3.3六點法
在FANUC機器人示教器中,六點法是在三點法的基礎上實現的,只是第四點也被稱為坐標原點,是讓工具的參考點垂直于基準點,如圖4(d)所示;第五點是工具參考點從坐標原點向將要設定為TCP的+x方向移動,如圖4(e)所示;第六點是工具參考點從坐標原點向將要設定TCP的+z方向移動,如圖4(f)所示。這樣,機器人通過這六個位置點的數據自動計算求得新的工具坐標系TCP的數據。
4結論
工業機器人在使用之前,必須首先根據末端執行器的類型,選擇合理的設置方法,正確的利用示教器進行示教,從而建立新的工具坐標系,為機器人精確的運動控制奠定基礎,也為FANUC機器人的學習和使用提供了參考。
