基于機(jī)器人視覺的目標(biāo)識(shí)別與跟蹤技術(shù)應(yīng)用研究
2020-07-04 02:15:25陳易平諶頏
電腦知識(shí)與技術(shù) 2020年15期
關(guān)鍵詞:特征提取
陳易平 諶頏

摘要:目前機(jī)器人在工業(yè)生產(chǎn)領(lǐng)域已有了廣泛應(yīng)用,基于機(jī)器人視覺對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行識(shí)別與跟蹤是機(jī)器人技術(shù)領(lǐng)域的研究熱點(diǎn)之一。研究動(dòng)態(tài)環(huán)境下機(jī)器人對(duì)運(yùn)動(dòng)目標(biāo)的識(shí)別與跟蹤,實(shí)現(xiàn)了對(duì)動(dòng)態(tài)目標(biāo)的識(shí)別,研究圖像預(yù)處理過程,改進(jìn)特征提取和分類判斷的算法,提高目標(biāo)識(shí)別準(zhǔn)確率和效率,在探索實(shí)現(xiàn)工業(yè)機(jī)器人智能感知和控制系統(tǒng)開發(fā)中具有重要的意義。
關(guān)鍵詞:機(jī)器人視覺;目標(biāo)識(shí)別;目標(biāo)跟蹤;特征提取
中圖分類號(hào):TP311 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2020)15-0202-02
1引言
隨著工業(yè)4.0時(shí)代的到來,機(jī)器人在工業(yè)生產(chǎn)領(lǐng)域已得到廣泛應(yīng)用,代替了大量人工完成生產(chǎn)線上的工作,提高了企業(yè)的生產(chǎn)效率和降低了人力成本。基于機(jī)器人視覺對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行識(shí)別與跟蹤是機(jī)器人技術(shù)領(lǐng)域的研究熱點(diǎn)之一。隨著AI領(lǐng)域深度學(xué)習(xí)技術(shù)的發(fā)展,進(jìn)一步推動(dòng)了機(jī)器人視覺的應(yīng)用研究。通過研究目標(biāo)識(shí)別準(zhǔn)確度和效率的改進(jìn),分析在不同場(chǎng)景環(huán)境下,改進(jìn)了圖像分割、預(yù)處理等算法;同時(shí)研究對(duì)比了不同目標(biāo)跟蹤算法,選擇了跟蹤精度和實(shí)時(shí)性更好的算法,在探索實(shí)現(xiàn)工業(yè)機(jī)器人智能感知和控制系統(tǒng)研發(fā)中具有重要的意義。
2機(jī)器視覺的圖像識(shí)別與目標(biāo)跟蹤技術(shù)
基于機(jī)器視覺的圖像識(shí)別技術(shù)是一項(xiàng)運(yùn)用計(jì)算機(jī)對(duì)圖像進(jìn)行處理、分析和理解的技術(shù),它以數(shù)字圖像處理與識(shí)別為基礎(chǔ)。傳統(tǒng)圖像識(shí)別技術(shù)主要包括圖像獲取、預(yù)處理、特征提取、分類判決等步驟構(gòu)成,而近年來深度學(xué)習(xí)的發(fā)展,大大提高了圖像識(shí)別的準(zhǔn)確率,與傳統(tǒng)識(shí)別技術(shù)相比,無須人工設(shè)計(jì)特征,系統(tǒng)可自行學(xué)習(xí)歸納出特征,降低了使用難度,能夠快速實(shí)現(xiàn)應(yīng)用。
基于機(jī)器視覺的目標(biāo)跟蹤的基本過程包含兩個(gè)主要環(huán)節(jié),第一個(gè)環(huán)節(jié)是動(dòng)態(tài)目標(biāo)的識(shí)別:通過對(duì)連續(xù)圖像幀序列中的運(yùn)動(dòng)目標(biāo)進(jìn)行檢測(cè),提取其特征,并標(biāo)注標(biāo)簽,完成目標(biāo)識(shí)別;第二個(gè)環(huán)節(jié)就是對(duì)目標(biāo)進(jìn)行跟蹤,其過程是:先獲得運(yùn)動(dòng)目標(biāo)的速度、位置、位移量、運(yùn)行路徑等數(shù)據(jù),經(jīng)過進(jìn)一步處理和分析,完成對(duì)運(yùn)動(dòng)目標(biāo)的行為理解,從而實(shí)現(xiàn)對(duì)目標(biāo)的跟蹤。目標(biāo)跟蹤技術(shù)涉及圖像處理、模式識(shí)別、人工智能、自動(dòng)控制等多個(gè)領(lǐng)域的知識(shí),是實(shí)現(xiàn)智能機(jī)器人關(guān)鍵技術(shù)之一。針對(duì)不同的研究對(duì)象要選擇不同的跟蹤算法,主要包括基于目標(biāo)區(qū)域、基于目標(biāo)特征、基于目標(biāo)模型和基于主動(dòng)輪廓等算法。
3目標(biāo)識(shí)別與跟蹤系統(tǒng)的設(shè)計(jì)
本文選用Arduino機(jī)械臂替代工業(yè)機(jī)器人,集成階段采用工業(yè)機(jī)器人樣機(jī)進(jìn)行調(diào)試。Arduino機(jī)械臂是一個(gè)開源的軟件硬件平臺(tái),支持Windows和VC開發(fā)環(huán)境。機(jī)器人視覺系統(tǒng)由1個(gè)云臺(tái)CCD攝像機(jī)、1個(gè)視頻采集卡和1臺(tái)主機(jī)組成,其中攝像機(jī)通過視頻采集卡與PCI總線相連,能夠?qū)υ婆_(tái)實(shí)現(xiàn)變焦、轉(zhuǎn)向等控制。交互指令系統(tǒng)遵循上下位機(jī)制定的通信協(xié)議規(guī)范,實(shí)現(xiàn)機(jī)器人作業(yè)控制。
3.1視覺子系統(tǒng)的設(shè)計(jì)
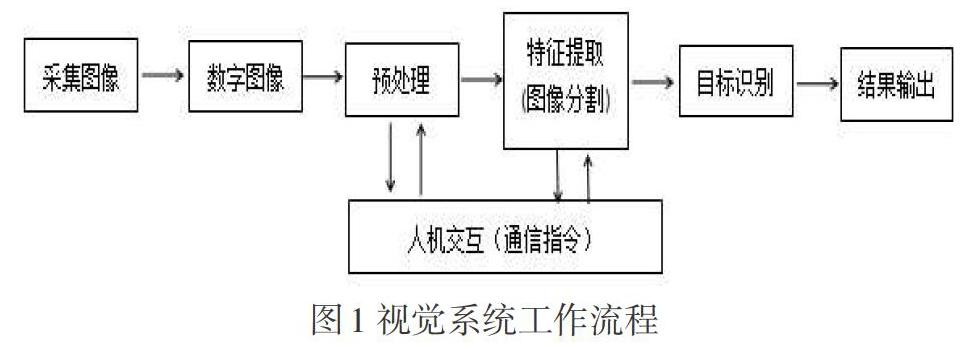
視覺子系統(tǒng)是設(shè)計(jì)的核心部分,在機(jī)器人目標(biāo)跟蹤時(shí),主要負(fù)責(zé)實(shí)時(shí)采集圖像信息,然后自動(dòng)處理、分析、理解圖像,以獲得運(yùn)動(dòng)目標(biāo)的位置、方向、速度等信息,并將信息實(shí)時(shí)反饋給人機(jī)交互系統(tǒng),其工作流程如圖l所示。
3.2圖像分割算法
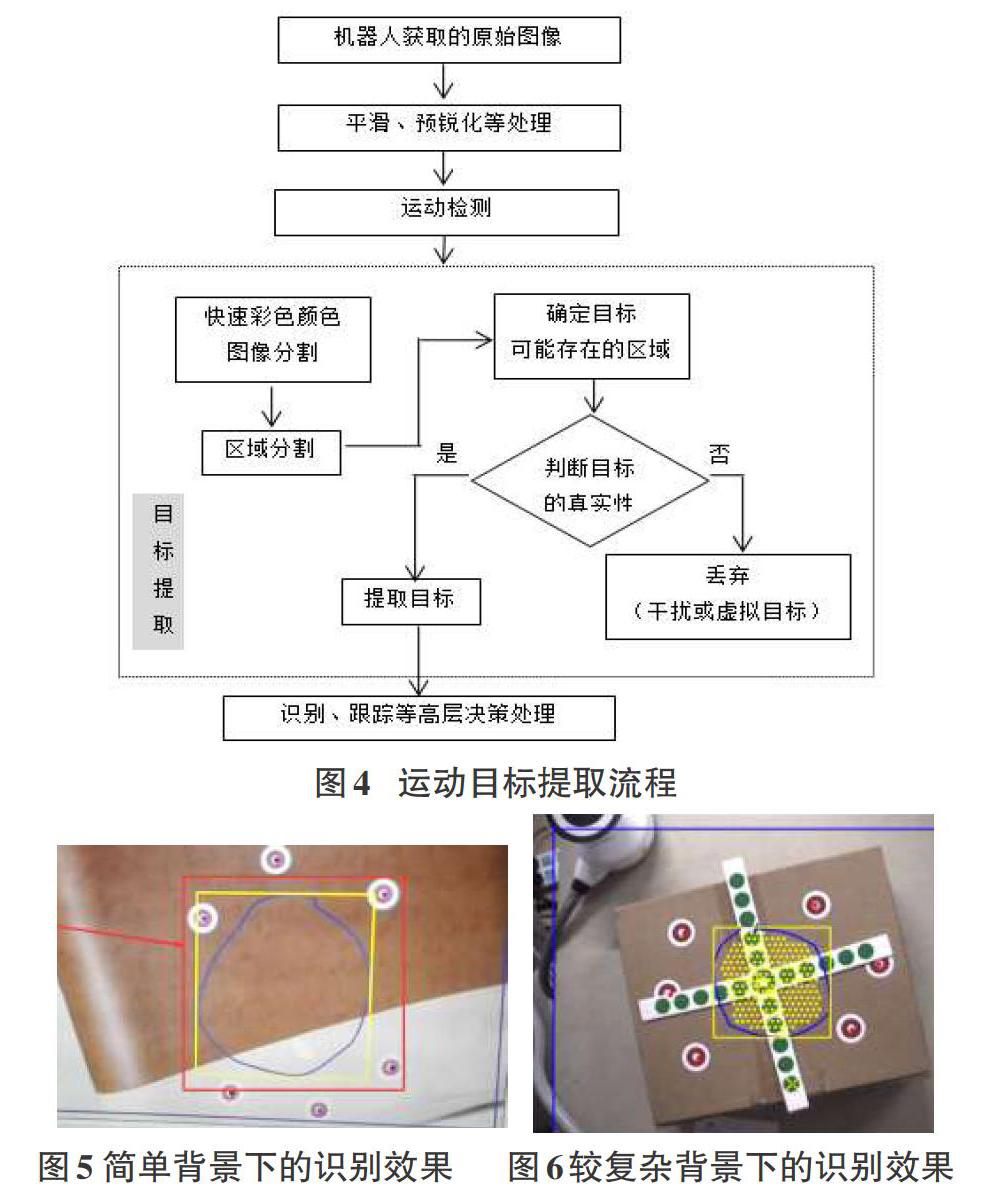
圖像分割算法的目的是將目標(biāo)從圖像中分離提取出來,其分割的結(jié)果是否精準(zhǔn)將會(huì)影響到目標(biāo)識(shí)別、提取、定位和跟蹤的精確度,必然影響到系統(tǒng)的整體性能。本文在實(shí)驗(yàn)中對(duì)比分析了在不同場(chǎng)景下閾值化分割、圖像邊緣檢測(cè)法和基于區(qū)域的圖像分割法這三種方法分割效果的優(yōu)劣,為實(shí)際工作場(chǎng)景中選擇合適的圖像分割算法提供優(yōu)先選擇參考。
3.3攝像機(jī)標(biāo)定模型的確定
攝像機(jī)在識(shí)別某區(qū)域目標(biāo)時(shí),攝像機(jī)標(biāo)定只涉及兩個(gè)主要的內(nèi)部參數(shù),即水平方向的比例系數(shù)Px和垂直方向的比例系數(shù)Ry,其余參數(shù)不重要,在此處可忽略。本課題僅研究近距離跟蹤目標(biāo)的場(chǎng)景,因此采集的區(qū)域面積較小,可將采集區(qū)域到圖像平面的映射近似呈線性關(guān)系。
以近距離目標(biāo)跟蹤為例,首先通過手持?jǐn)z像頭的標(biāo)定方法,測(cè)出其所拍攝圖像的6個(gè)特殊位置點(diǎn)(0,0)、(0,v/2)、(0,v)、(U/2,0)、(u/2,V/2)、(u/2,V)離攝像設(shè)備的實(shí)際距離為r,考慮圖像的對(duì)稱性,(U,0)、(u,W2)和(u,V)位置點(diǎn)可以不用測(cè)量。
3.4運(yùn)動(dòng)目標(biāo)的特征提取
特征提取與特征選擇是圖像分類和識(shí)別的核心問題。其方法是:將數(shù)據(jù)集T={T1,T2,…,Tk},經(jīng)過某一變換,如h;,(i=1,2,…,n;n
3.5目標(biāo)跟蹤算法
對(duì)于距離遠(yuǎn)、面積小的目標(biāo)通常采用相關(guān)濾波跟蹤算法以提高目標(biāo)跟蹤精度。在研究過程中發(fā)現(xiàn)近距離目標(biāo)跟蹤具有一定面積且?guī)g抖動(dòng)較大,可以采用窗口質(zhì)心跟蹤或特征匹配跟蹤算法以保持跟蹤的穩(wěn)定性和精度。
本文探討了基于CamShift目標(biāo)跟蹤算法的改進(jìn),能夠提高目標(biāo)跟蹤的準(zhǔn)確度與實(shí)時(shí)性。該算法基于圖像的顏色概率分布跟蹤目標(biāo),主要應(yīng)用于與背景存在顯著色彩差異的彩色目標(biāo)跟蹤,其核心是MeanShfit算法。MeanShift算法是一種穩(wěn)健的特征空間分析方法,其實(shí)現(xiàn)過程如下:
Stepl.在顏色概率分布圖中選取一個(gè)大小為s的搜索窗口;
Step2.確定此搜索窗口的初始位置;
Step3.計(jì)算搜索窗口的質(zhì)心;
Step4.將新的搜索窗口質(zhì)心置為Step3得到的結(jié)果(xo,yo);并重新設(shè)置搜索窗口大小s。
Step5.重復(fù)步驟3和4,直至質(zhì)心收斂。
將MeanShift算法擴(kuò)展到視頻(連續(xù)圖像幀),基本思路是將視頻圖像中的全部幀做MeanShift運(yùn)算,并將上一幀的結(jié)果作為下一幀MeanShift算法的初始值,依此順序迭代就實(shí)現(xiàn)了動(dòng)態(tài)目標(biāo)跟蹤,即形成CamShif算法。
4結(jié)論
研究了在動(dòng)態(tài)環(huán)境下機(jī)器人對(duì)運(yùn)動(dòng)目標(biāo)的識(shí)別與跟蹤,實(shí)現(xiàn)了動(dòng)態(tài)圖像目標(biāo)識(shí)別功能,采用改進(jìn)的基于CamShift目標(biāo)跟蹤算法,提高了系統(tǒng)跟蹤的準(zhǔn)確性和實(shí)時(shí)性。
猜你喜歡
艦船科學(xué)技術(shù)(2022年15期)2022-09-14 09:21:50
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動(dòng)化學(xué)報(bào)(2017年7期)2017-04-18 13:41:09
自動(dòng)化學(xué)報(bào)(2017年11期)2017-04-04 02:52:58
中國(guó)生物醫(yī)學(xué)工程學(xué)報(bào)(2017年6期)2017-02-10 05:11:45
廣西科技大學(xué)學(xué)報(bào)(2016年1期)2016-06-22 13:10:38
計(jì)算機(jī)工程(2015年4期)2015-07-05 08:28:02
機(jī)電信息(2015年3期)2015-02-27 15:54:46
機(jī)械工程師(2015年10期)2015-02-02 01:13:49
