基于深度神經(jīng)網(wǎng)絡(luò)的雷達(dá)幅度序列目標(biāo)識(shí)別
2020-07-04 02:13:18梁聰尹揚(yáng)帆
電腦知識(shí)與技術(shù) 2020年13期
梁聰 尹揚(yáng)帆

摘要:在雷達(dá)目標(biāo)識(shí)別中,由于目標(biāo)結(jié)構(gòu)的不同,目標(biāo)對(duì)雷達(dá)發(fā)射波產(chǎn)生不同的回波。通過(guò)從雷達(dá)回波中提取目標(biāo)的特征信息,可以對(duì)目標(biāo)進(jìn)行分類識(shí)別。目標(biāo)特征均存在計(jì)算量大、環(huán)境要求高等問(wèn)題。針對(duì)上述問(wèn)題,該文提出一種基于深度神經(jīng)網(wǎng)絡(luò)的雷達(dá)幅度序列目標(biāo)識(shí)別的方法。該方法通過(guò)提取目標(biāo)在運(yùn)動(dòng)過(guò)程中的幅度序列作為識(shí)別目標(biāo)的特征,再利用深度神經(jīng)網(wǎng)絡(luò)進(jìn)行識(shí)別。最后,利用實(shí)測(cè)數(shù)據(jù)對(duì)該方法進(jìn)行驗(yàn)證。實(shí)驗(yàn)結(jié)果表明,該方法可以有效地對(duì)目標(biāo)進(jìn)行識(shí)別。
關(guān)鍵詞:雷達(dá)目標(biāo)識(shí)別;幅度序列;深度神經(jīng)網(wǎng)絡(luò)
中圖分類號(hào):TP393 文獻(xiàn)標(biāo)識(shí)碼:A
文章編號(hào):1009-3044(2020)13-0020-02
1引言
在現(xiàn)代雷達(dá)技術(shù)中,雷達(dá)目標(biāo)識(shí)別被視作重要的技術(shù)發(fā)展方向,它是一項(xiàng)集傳感器、目標(biāo)、環(huán)境和現(xiàn)代信號(hào)處理技術(shù)為一體的繁雜系統(tǒng)工程。目標(biāo)識(shí)別的過(guò)程大致可以分為回波信號(hào)獲取、信號(hào)預(yù)處理、特征提取與分類判決輸出。文獻(xiàn)采用超帶寬雷達(dá)獲取人體的微動(dòng)信息,來(lái)識(shí)別障礙物后有無(wú)生命體。文獻(xiàn)采用低分辨雷達(dá)獲取單兵、輪式車和履帶車的微多普勒特征,利用SVM分類器實(shí)現(xiàn)對(duì)目標(biāo)的識(shí)別。文獻(xiàn)利用基于ISAR圖像改良的InISAR圖像進(jìn)行特征提取和識(shí)別,也對(duì)在不同幅度、不同速度以及不同姿態(tài)下的目標(biāo)進(jìn)行對(duì)比,該方法充分利用了目標(biāo)的幾何特征,能夠獲得更好的性能。
現(xiàn)如今,在雷達(dá)目標(biāo)識(shí)別中,對(duì)于雷達(dá)散射截面積、高分辨距離像等特征,都有諸多方法進(jìn)行提取。然而提取過(guò)程中還是存在諸多困難的。雷達(dá)目標(biāo)的幅度顯然比較容易獲得,而單一的利用某一時(shí)刻目標(biāo)的幅度作為特征來(lái)進(jìn)行目標(biāo)識(shí)別則比較具有偶然性,存在較大誤差。因此,本文通過(guò)提取目標(biāo)在運(yùn)動(dòng)過(guò)程不同時(shí)刻的幅度而得到的幅度序列作為目標(biāo)的特征進(jìn)行識(shí)別則更加準(zhǔn)確。針對(duì)提取的目標(biāo)幅度序列特征利用深度神經(jīng)網(wǎng)絡(luò)模型進(jìn)行識(shí)別,實(shí)驗(yàn)結(jié)果表明,基于深度神經(jīng)網(wǎng)絡(luò)的幅度序列目標(biāo)識(shí)別的方法具有良好的識(shí)別分類效果,證明了該方法的有效性。
2目標(biāo)幅度序列的提取
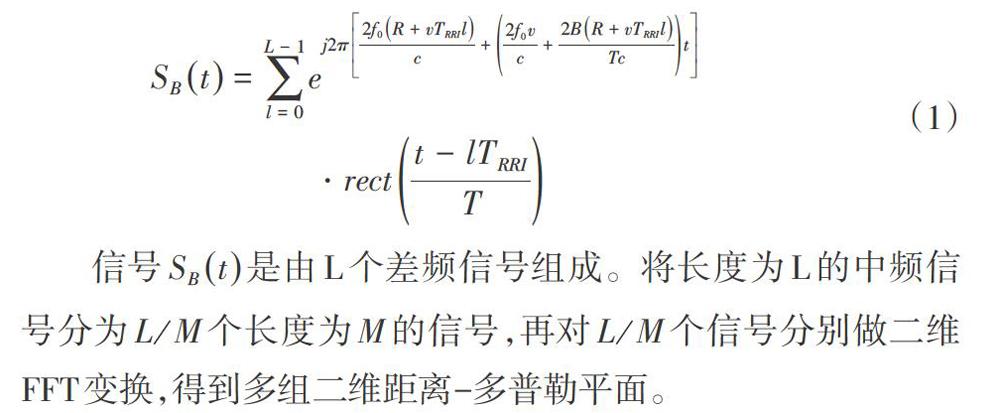
雷達(dá)目標(biāo)幅度序列體現(xiàn)了目標(biāo)在整個(gè)運(yùn)動(dòng)過(guò)程中幅度的變化情況。因此,需將目標(biāo)的整個(gè)運(yùn)動(dòng)過(guò)程看作若干個(gè)運(yùn)動(dòng)過(guò)程,分別對(duì)這些運(yùn)動(dòng)過(guò)程進(jìn)行處理,提取目標(biāo)的幅度,再將這些幅度按時(shí)間進(jìn)行排列,即可得到目標(biāo)的幅度序列。
目標(biāo)的回波信號(hào)經(jīng)過(guò)二維FFT變換后,目標(biāo)和雜波分布在距離一多普勒平面上,通過(guò)設(shè)置二維恒虛警的保護(hù)單元、參考單元對(duì)二維距離一多普勒平面上的目標(biāo)進(jìn)行檢測(cè),剔除虛假目標(biāo),得到二維距離一多普勒平面上目標(biāo)的峰值位置信息。
通過(guò)比較決策閾值和待測(cè)單元,進(jìn)而判斷待測(cè)單元是否存在目標(biāo)。再提取若干個(gè)運(yùn)動(dòng)過(guò)程中目標(biāo)的幅度,即可得到目標(biāo)的幅度序列。
4實(shí)驗(yàn)結(jié)果與分析
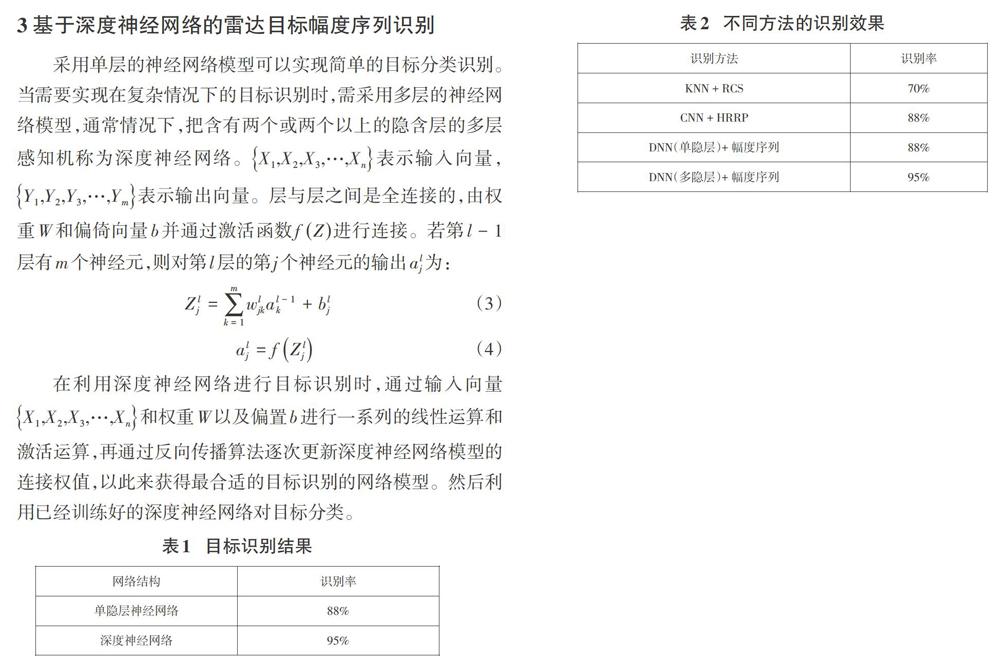
為了驗(yàn)證本文方法的有效性,采用LFMCW毫米波雷達(dá)采集的行人和車輛運(yùn)動(dòng)過(guò)程中的幅度序列進(jìn)行識(shí)別實(shí)驗(yàn)。為了對(duì)比單層神經(jīng)網(wǎng)絡(luò)和深度神經(jīng)網(wǎng)絡(luò)的識(shí)別效果,本文設(shè)計(jì)單個(gè)隱層和三個(gè)隱層的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu),在實(shí)驗(yàn)過(guò)程中,兩類目標(biāo)均提取700組幅度序列以作為樣本,每類目標(biāo)均選取600組數(shù)據(jù)樣本用來(lái)訓(xùn)練兩種神經(jīng)網(wǎng)絡(luò)模型,再利用另外的兩類的100組數(shù)據(jù)樣本來(lái)檢驗(yàn)兩個(gè)模型的目標(biāo)識(shí)別效果。實(shí)驗(yàn)結(jié)果如表1所示。
從表中數(shù)據(jù)可以看出,具有三個(gè)隱層的深度神經(jīng)網(wǎng)絡(luò)識(shí)別率明顯高于單隱層神經(jīng)網(wǎng)絡(luò)。此外,為了驗(yàn)證該方法的識(shí)別效果,將本文的目標(biāo)識(shí)別方法和其他文獻(xiàn)中的方法進(jìn)行比較,其結(jié)果如表2所示。
文獻(xiàn)[5]采用循環(huán)神經(jīng)網(wǎng)絡(luò)的注意模型識(shí)別HRRP特征識(shí)別率達(dá)到88%,文獻(xiàn)[6]采用最近鄰法識(shí)別RCS目標(biāo),識(shí)別率可達(dá)70%,而本文通過(guò)提取行人和車輛運(yùn)動(dòng)目標(biāo)的幅度序列,采用深度神經(jīng)網(wǎng)絡(luò)進(jìn)行識(shí)別,識(shí)別率可以達(dá)到95%。由此可說(shuō)明,運(yùn)動(dòng)目標(biāo)的幅度序列可以用來(lái)進(jìn)行目標(biāo)識(shí)別,利用深度神經(jīng)網(wǎng)絡(luò)進(jìn)行目標(biāo)識(shí)別效果可觀。
5結(jié)束語(yǔ)
針對(duì)雷達(dá)目標(biāo)的識(shí)別問(wèn)題,本文提出了通過(guò)提取運(yùn)動(dòng)目標(biāo)的幅度序列,利用深度神經(jīng)網(wǎng)絡(luò)進(jìn)行目標(biāo)識(shí)別。實(shí)驗(yàn)結(jié)果表明,該方法識(shí)別率較高。本文的工作是利用幅度序列對(duì)運(yùn)動(dòng)目標(biāo)進(jìn)行識(shí)別的一種嘗試,在復(fù)雜的背景噪聲下,對(duì)動(dòng)物、行人、不同類型車輛等多目標(biāo)的分類識(shí)別有待進(jìn)一步研究。
